
7.2.3 导航实现03_定位
7.2.3 导航实现03_定位
所谓定位就是推算机器人自身在全局地图中的位置,当然,SLAM中也包含定位算法实现,不过SLAM的定位是用于构建全局地图的,是属于导航开始之前的阶段,而当前定位是用于导航中,导航中,机器人需要按照设定的路线运动,通过定位可以判断机器人的实际轨迹是否符合预期。在ROS的导航功能包集navigation中提供了 amcl 功能包,用于实现导航中的机器人定位。
1.amcl简介
AMCL(adaptive Monte Carlo Localization) 是用于2D移动机器人的概率定位系统,它实现了自适应(或KLD采样)蒙特卡洛定位方法,可以根据已有地图使用粒子滤波器推算机器人位置。
amcl已经被集成到了navigation包,navigation安装前面也有介绍,命令如下:
sudo apt install ros-<ROS版本>-navigation
2.amcl节点说明
amcl 功能包中的核心节点是:amcl。为了方便调用,需要先了解该节点订阅的话题、发布的话题、服务以及相关参数。
3.1订阅的Topic
scan(sensor_msgs/LaserScan)
- 激光雷达数据。
tf(tf/tfMessage)
- 坐标变换消息。
initialpose(geometry_msgs/PoseWithCovarianceStamped)
- 用来初始化粒子滤波器的均值和协方差。
map(nav_msgs/OccupancyGrid)
- 获取地图数据。
3.2发布的Topic
amcl_pose(geometry_msgs/PoseWithCovarianceStamped)
- 机器人在地图中的位姿估计。
particlecloud(geometry_msgs/PoseArray)
- 位姿估计集合,rviz中可以被 PoseArray 订阅然后图形化显示机器人的位姿估计集合。
tf(tf/tfMessage)
- 发布从 odom 到 map 的转换。
3.3服务
global_localization(std_srvs/Empty)
- 初始化全局定位的服务。
request_nomotion_update(std_srvs/Empty)
- 手动执行更新和发布更新的粒子的服务。
set_map(nav_msgs/SetMap)
- 手动设置新地图和姿态的服务。
3.4调用的服务
static_map(nav_msgs/GetMap)
- 调用此服务获取地图数据。
3.5参数
~odom_model_type(string, default:"diff")
- 里程计模型选择: "diff","omni","diff-corrected","omni-corrected" (diff 差速、omni 全向轮)
~odom_frame_id(string, default:"odom")
- 里程计坐标系。
~base_frame_id(string, default:"base_link")
- 机器人极坐标系。
~global_frame_id(string, default:"map")
- 地图坐标系。
.... 参数较多,上述是几个较为常用的参数,其他参数介绍可参考官网。
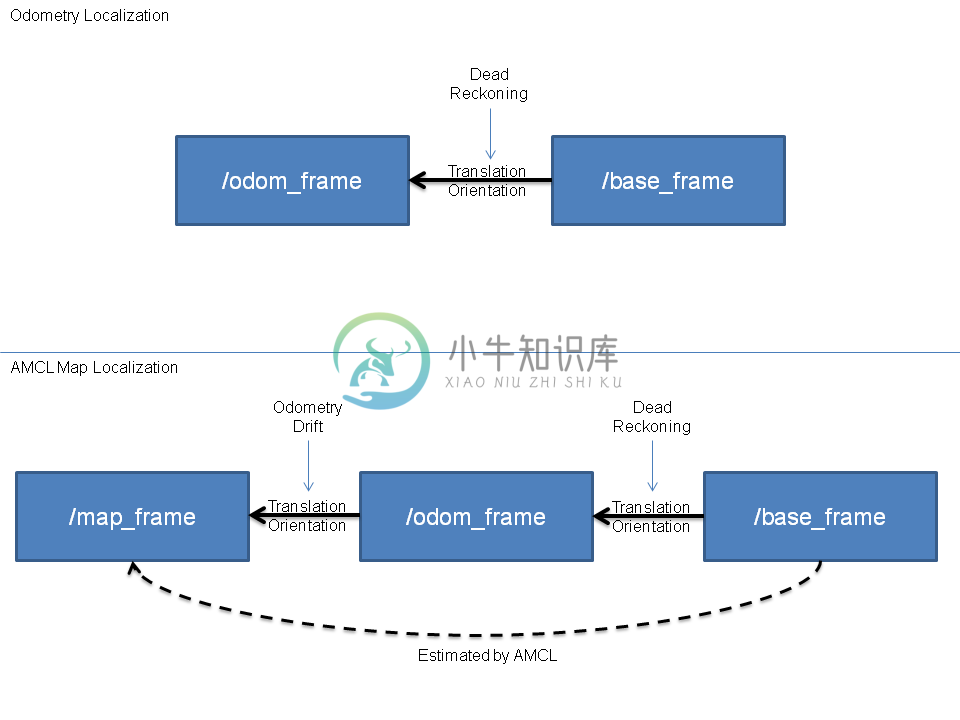
3.6坐标变换
里程计本身也是可以协助机器人定位的,不过里程计存在累计误差且一些特殊情况时(车轮打滑)会出现定位错误的情况,amcl 则可以通过估算机器人在地图坐标系下的姿态,再结合里程计提高定位准确度。
- 里程计定位:只是通过里程计数据实现 /odom_frame 与 /base_frame 之间的坐标变换。
- amcl定位: 可以提供 /map_frame 、/odom_frame 与 /base_frame 之间的坐标变换。
3.amcl使用
3.1编写amcl节点相关的launch文件
关于launch文件的实现,在amcl功能包下的example目录已经给出了示例,可以作为参考,具体实现:
roscd amcl
ls examples
该目录下会列出两个文件: amcl_diff.launch 和 amcl_omni.launch 文件,前者适用于差分移动机器人,后者适用于全向移动机器人,可以按需选择,此处参考前者,新建 launch 文件,复制 amcl_diff.launch 文件内容并修改如下:
<launch>
<node pkg="amcl" type="amcl" name="amcl" output="screen">
<!-- Publish scans from best pose at a max of 10 Hz -->
<param name="odom_model_type" value="diff"/><!-- 里程计模式为差分 -->
<param name="odom_alpha5" value="0.1"/>
<param name="transform_tolerance" value="0.2" />
<param name="gui_publish_rate" value="10.0"/>
<param name="laser_max_beams" value="30"/>
<param name="min_particles" value="500"/>
<param name="max_particles" value="5000"/>
<param name="kld_err" value="0.05"/>
<param name="kld_z" value="0.99"/>
<param name="odom_alpha1" value="0.2"/>
<param name="odom_alpha2" value="0.2"/>
<!-- translation std dev, m -->
<param name="odom_alpha3" value="0.8"/>
<param name="odom_alpha4" value="0.2"/>
<param name="laser_z_hit" value="0.5"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_model_type" value="likelihood_field"/>
<!-- <param name="laser_model_type" value="beam"/> -->
<param name="laser_likelihood_max_dist" value="2.0"/>
<param name="update_min_d" value="0.2"/>
<param name="update_min_a" value="0.5"/>
<param name="odom_frame_id" value="odom"/><!-- 里程计坐标系 -->
<param name="base_frame_id" value="base_footprint"/><!-- 添加机器人基坐标系 -->
<param name="global_frame_id" value="map"/><!-- 添加地图坐标系 -->
<param name="resample_interval" value="1"/>
<param name="transform_tolerance" value="0.1"/>
<param name="recovery_alpha_slow" value="0.0"/>
<param name="recovery_alpha_fast" value="0.0"/>
</node>
</launch>
3.2编写测试launch文件
amcl节点是不可以单独运行的,运行 amcl 节点之前,需要先加载全局地图,然后启动 rviz 显示定位结果,上述节点可以集成进launch文件,内容示例如下:
<launch>
<!-- 设置地图的配置文件 -->
<arg name="map" default="nav.yaml" />
<!-- 运行地图服务器,并且加载设置的地图-->
<node name="map_server" pkg="map_server" type="map_server" args="$(find mycar_nav)/map/$(arg map)"/>
<!-- 启动AMCL节点 -->
<include file="$(find mycar_nav)/launch/amcl.launch" />
<!-- 运行rviz -->
<node pkg="rviz" type="rviz" name="rviz"/>
</launch>
当然,launch文件中地图服务节点和amcl节点中的包名、文件名需要根据自己的设置修改。
3.3执行
1.先启动 Gazebo 仿真环境(此过程略);
2.启动键盘控制节点:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
3.启动上一步中集成地图服务、amcl 与 rviz 的 launch 文件;
4.在启动的 rviz 中,添加RobotModel、Map组件,分别显示机器人模型与地图,添加 posearray 插件,设置topic为particlecloud来显示 amcl 预估的当前机器人的位姿,箭头越是密集,说明当前机器人处于此位置的概率越高;
5.通过键盘控制机器人运动,会发现 posearray 也随之而改变。
另请参考: