
5.1.5 坐标系关系查看
5.1.5 坐标系关系查看
在机器人系统中,涉及的坐标系有多个,为了方便查看,ros 提供了专门的工具,可以用于生成显示坐标系关系的 pdf 文件,该文件包含树形结构的坐标系图谱。
6.1准备
首先调用rospack find tf2_tools查看是否包含该功能包,如果没有,请使用如下命令安装:
sudo apt install ros-noetic-tf2-tools
6.2使用
6.2.1生成 pdf 文件
启动坐标系广播程序之后,运行如下命令:
rosrun tf2_tools view_frames.py
会产生类似于下面的日志信息:
[INFO] [1592920556.827549]: Listening to tf data during 5 seconds...
[INFO] [1592920561.841536]: Generating graph in frames.pdf file...
查看当前目录会生成一个 frames.pdf 文件
6.2.2查看文件
可以直接进入目录打开文件,或者调用命令查看文件:evince frames.pdf
内如如图所示: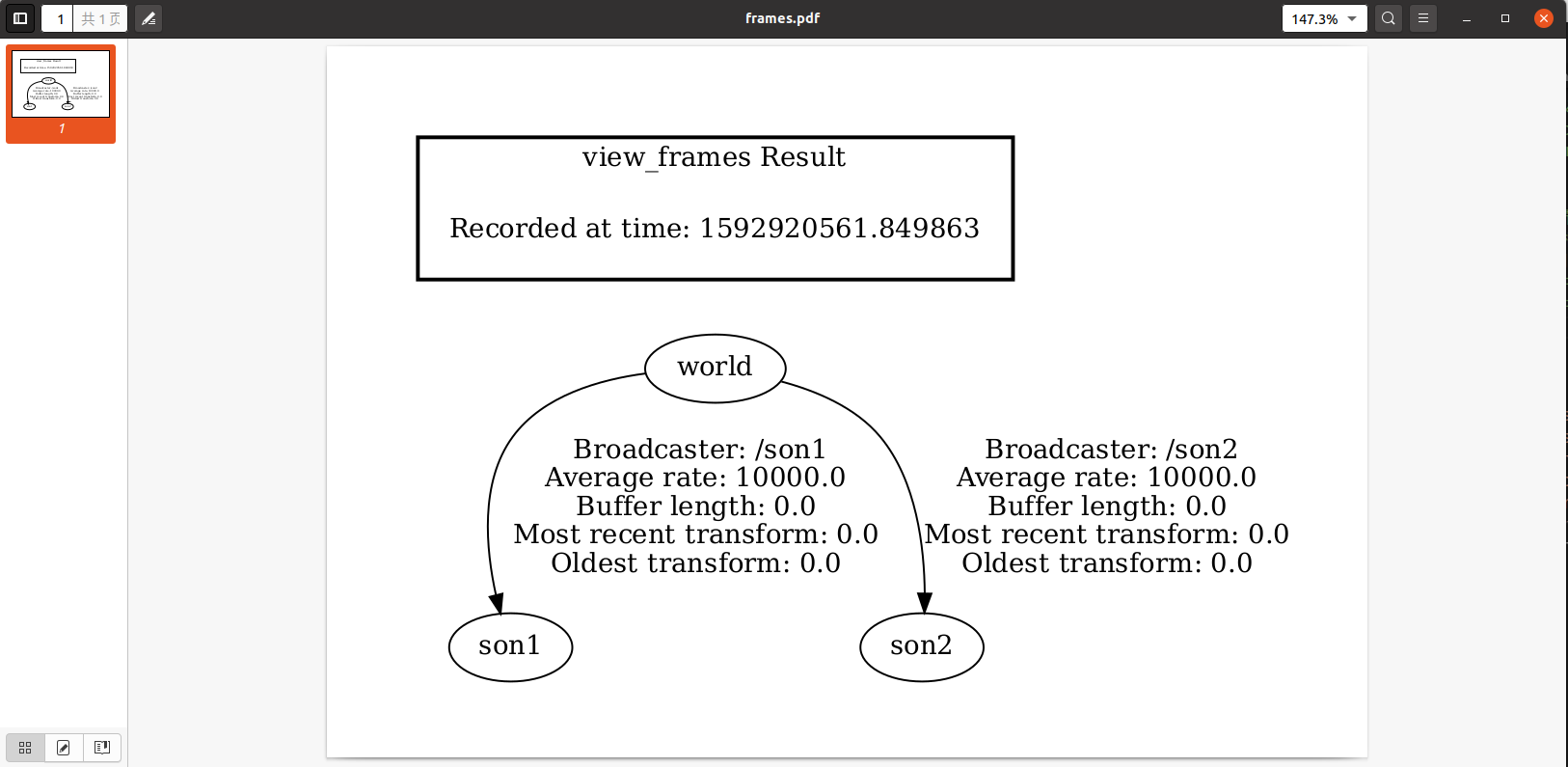
另请参考: