
6.4.4 Xacro_实操
6.4.4 Xacro_实操
需求描述:
在前面小车底盘基础之上,添加摄像头和雷达传感器。
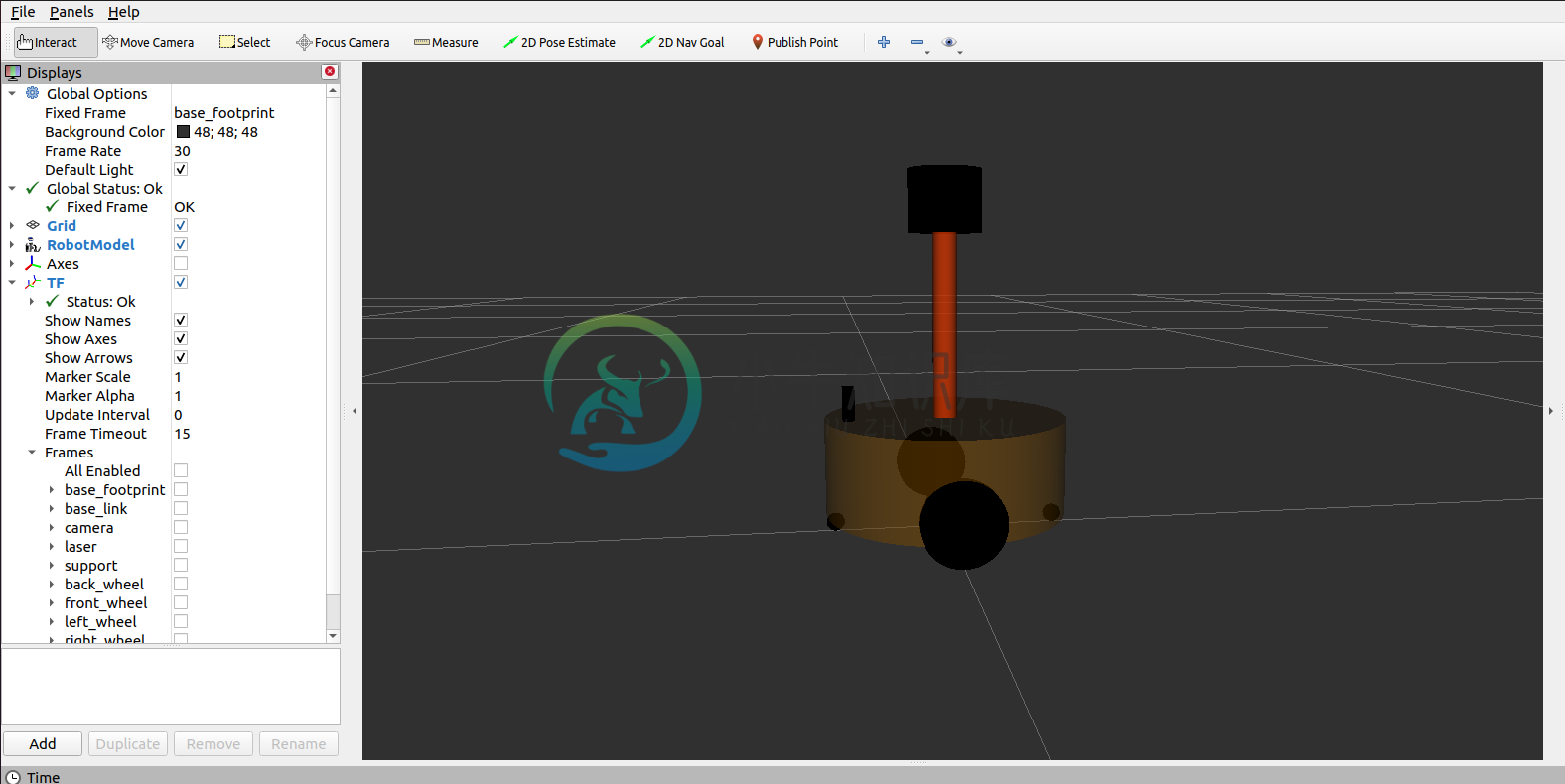
结果演示:
实现分析:
机器人模型由多部件组成,可以将不同组件设置进单独文件,最终通过文件包含实现组件的拼装。
实现流程:
首先编写摄像头和雷达的 xacro 文件
然后再编写一个组合文件,组合底盘、摄像头与雷达
最后,通过 launch 文件启动 Rviz 并显示模型
1.摄像头和雷达 Xacro 文件实现
摄像头 xacro 文件:
<!-- 摄像头相关的 xacro 文件 -->
<robot name="my_camera" xmlns:xacro="http://wiki.ros.org/xacro">
<!-- 摄像头属性 -->
<xacro:property name="camera_length" value="0.01" /> <!-- 摄像头长度(x) -->
<xacro:property name="camera_width" value="0.025" /> <!-- 摄像头宽度(y) -->
<xacro:property name="camera_height" value="0.025" /> <!-- 摄像头高度(z) -->
<xacro:property name="camera_x" value="0.08" /> <!-- 摄像头安装的x坐标 -->
<xacro:property name="camera_y" value="0.0" /> <!-- 摄像头安装的y坐标 -->
<xacro:property name="camera_z" value="${base_link_length / 2 + camera_height / 2}" /> <!-- 摄像头安装的z坐标:底盘高度 / 2 + 摄像头高度 / 2 -->
<!-- 摄像头关节以及link -->
<link name="camera">
<visual>
<geometry>
<box size="${camera_length} ${camera_width} ${camera_height}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
<material name="black" />
</visual>
</link>
<joint name="camera2base_link" type="fixed">
<parent link="base_link" />
<child link="camera" />
<origin xyz="${camera_x} ${camera_y} ${camera_z}" />
</joint>
</robot>
雷达 xacro 文件:
<!--
小车底盘添加雷达
-->
<robot name="my_laser" xmlns:xacro="http://wiki.ros.org/xacro">
<!-- 雷达支架 -->
<xacro:property name="support_length" value="0.15" /> <!-- 支架长度 -->
<xacro:property name="support_radius" value="0.01" /> <!-- 支架半径 -->
<xacro:property name="support_x" value="0.0" /> <!-- 支架安装的x坐标 -->
<xacro:property name="support_y" value="0.0" /> <!-- 支架安装的y坐标 -->
<xacro:property name="support_z" value="${base_link_length / 2 + support_length / 2}" /> <!-- 支架安装的z坐标:底盘高度 / 2 + 支架高度 / 2 -->
<link name="support">
<visual>
<geometry>
<cylinder radius="${support_radius}" length="${support_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
<material name="red">
<color rgba="0.8 0.2 0.0 0.8" />
</material>
</visual>
</link>
<joint name="support2base_link" type="fixed">
<parent link="base_link" />
<child link="support" />
<origin xyz="${support_x} ${support_y} ${support_z}" />
</joint>
<!-- 雷达属性 -->
<xacro:property name="laser_length" value="0.05" /> <!-- 雷达长度 -->
<xacro:property name="laser_radius" value="0.03" /> <!-- 雷达半径 -->
<xacro:property name="laser_x" value="0.0" /> <!-- 雷达安装的x坐标 -->
<xacro:property name="laser_y" value="0.0" /> <!-- 雷达安装的y坐标 -->
<xacro:property name="laser_z" value="${support_length / 2 + laser_length / 2}" /> <!-- 雷达安装的z坐标:支架高度 / 2 + 雷达高度 / 2 -->
<!-- 雷达关节以及link -->
<link name="laser">
<visual>
<geometry>
<cylinder radius="${laser_radius}" length="${laser_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
<material name="black" />
</visual>
</link>
<joint name="laser2support" type="fixed">
<parent link="support" />
<child link="laser" />
<origin xyz="${laser_x} ${laser_y} ${laser_z}" />
</joint>
</robot>
2.组合底盘摄像头与雷达的 xacro 文件
<!-- 组合小车底盘与摄像头与雷达 -->
<robot name="my_car_camera" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:include filename="my_base.urdf.xacro" />
<xacro:include filename="my_camera.urdf.xacro" />
<xacro:include filename="my_laser.urdf.xacro" />
</robot>
3.launch 文件
<launch>
<param name="robot_description" command="$(find xacro)/xacro $(find demo01_urdf_helloworld)/urdf/xacro/my_base_camera_laser.urdf.xacro" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find demo01_urdf_helloworld)/config/helloworld.rviz" />
<node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" output="screen" />
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen" />
<node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" output="screen" />
</launch>