
2.1.1 话题通信理论模型
2.1.1 理论模型
话题通信实现模型是比较复杂的,该模型如下图所示,该模型中涉及到三个角色:
- ROS Master (管理者)
- Talker (发布者)
- Listener (订阅者)
ROS Master 负责保管 Talker 和 Listener 注册的信息,并匹配话题相同的 Talker 与 Listener,帮助 Talker 与 Listener 建立连接,连接建立后,Talker 可以发布消息,且发布的消息会被 Listener 订阅。
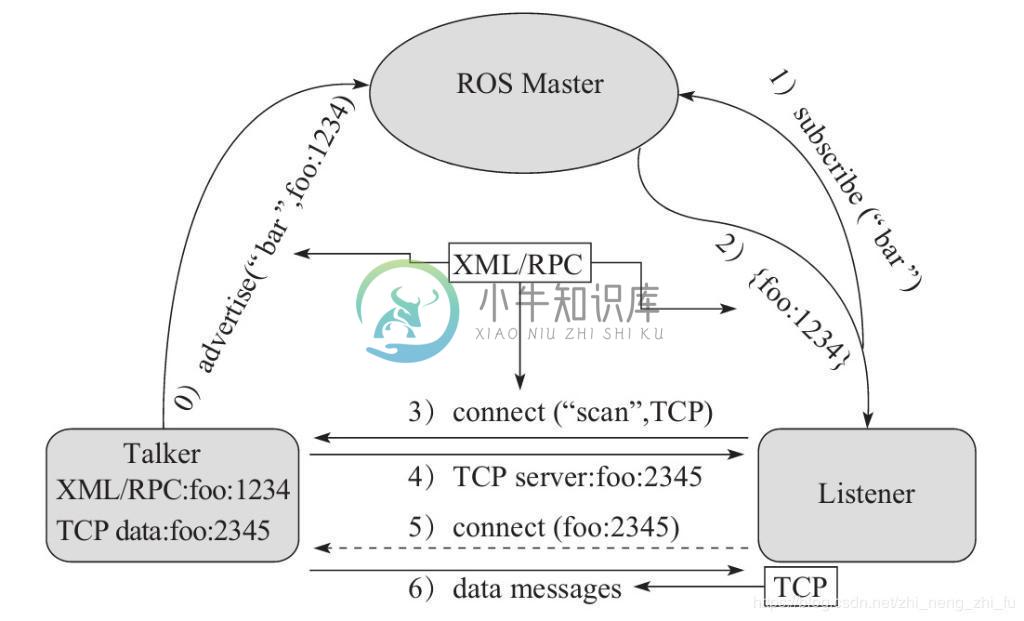 整个流程由以下步骤实现:
整个流程由以下步骤实现:
0.Talker注册
Talker启动后,会通过RPC在 ROS Master 中注册自身信息,其中包含所发布消息的话题名称。ROS Master 会将节点的注册信息加入到注册表中。
1.Listener注册
Listener启动后,也会通过RPC在 ROS Master 中注册自身信息,包含需要订阅消息的话题名。ROS Master 会将节点的注册信息加入到注册表中。
2.ROS Master实现信息匹配
ROS Master 会根据注册表中的信息匹配Talker 和 Listener,并通过 RPC 向 Listener 发送 Talker 的 RPC 地址信息。
3.Listener向Talker发送请求
Listener 根据接收到的 RPC 地址,通过 RPC 向 Talker 发送连接请求,传输订阅的话题名称、消息类型以及通信协议(TCP/UDP)。
4.Talker确认请求
Talker 接收到 Listener 的请求后,也是通过 RPC 向 Listener 确认连接信息,并发送自身的 TCP 地址信息。
5.Listener与Talker件里连接
Listener 根据步骤4 返回的消息使用 TCP 与 Talker 建立网络连接。
6.Talker向Listener发送消息
连接建立后,Talker 开始向 Listener 发布消息。
注意1:上述实现流程中,前五步使用的 RPC协议,最后两步使用的是 TCP 协议
注意2: Talker 与 Listener 的启动无先后顺序要求
注意3: Talker 与 Listener 都可以有多个
注意4: Talker 与 Listener 连接建立后,不再需要 ROS Master。也即,即便关闭ROS Master,Talker 与 Listern 照常通信。