第二十六课 卷积神 经网络(Convolutional Neural Netowrk)
国内外从事计算机视觉和图像处理相关领域的著名学者都以在三大顶级会议(ICCV,CVPR和ECCV)上发表论文为荣,其影响力远胜于一般SCI期刊论文,这三大顶级学术会议论文也引领着未来的研究趋势。CVPR是主要的计算机视觉会议,可以把它看作是计算机视觉研究的奥林匹克。博主今天先来整理CVPR2015年的精彩文章(这个就够很长一段时间消化的了)
顶级会议CVPR2015参会paper网址:
http://www.cv-foundation.org/openaccess/CVPR2015.py
来吧,一项项的开始整理,总有你需要的文章在等你!
CNN Architectures
CNN网络结构:
1.Hypercolumns for Object Segmentation and Fine-Grained Localization
Authors: Bharath Hariharan, Pablo Arbeláez, Ross Girshick, Jitendra Malik
2.Modeling Local and Global Deformations in Deep Learning: Epitomic Convolution, Multiple Instance Learning, and Sliding Window Detection
Authors: George Papandreou, Iasonas Kokkinos, Pierre-André Savalle
3.Going Deeper With Convolutions
Authors: Christian Szegedy, Wei Liu, Yangqing Jia, Pierre Sermanet, Scott Reed, Dragomir Anguelov, Dumitru Erhan, Vincent Vanhoucke, Andrew Rabinovich
这篇文章推荐一下,使用了**《network in network》**中的用 global averaging pooling layer 替代 fully-connected layer的思想。有看过的可以私信博主,一起讨论文章心得。
4.Improving Object Detection With Deep Convolutional Networks via Bayesian Optimization and Structured Prediction
Authors: Yuting Zhang, Kihyuk Sohn, Ruben Villegas, Gang Pan, Honglak Lee
5.Deep Neural Networks Are Easily Fooled: High Confidence Predictions for Unrecognizable Images
Authors: Anh Nguyen, Jason Yosinski, Jeff Clune
Action and Event Recognition
1.Deeply Learned Attributes for Crowded Scene Understanding
Authors: Jing Shao, Kai Kang, Chen Change Loy, Xiaogang Wang
2.Modeling Video Evolution for Action Recognition
Authors: Basura Fernando, Efstratios Gavves, José Oramas M., Amir Ghodrati, Tinne Tuytelaars
3.Joint Inference of Groups, Events and Human Roles in Aerial Videos
Authors: Tianmin Shu, Dan Xie, Brandon Rothrock, Sinisa Todorovic, Song Chun Zhu
Segmentation in Images and Video
1.Causal Video Object Segmentation From Persistence of Occlusions
Authors: Brian Taylor, Vasiliy Karasev, Stefano Soatto
2.Fully Convolutional Networks for Semantic Segmentation
Authors: Jonathan Long, Evan Shelhamer, Trevor Darrell
——文章把全连接层当做卷积层,也用来输出featuremap。这样相比Hypercolumns/HED 这样的模型,可迁移的模型层数(指VGG16/Alexnet等)就更多了。但是从文章来看,因为纯卷积嘛,所以featuremap的每个点之间没有位置信息的区分。相较于Hypercolumns的claim,鼻子的点出现在图像的上半部分可以划分为pedestrian类的像素,但是如果出现在下方就应该划分为背景。所以位置信息应该是挺重要需要考虑的。这也许是速度与性能的trade-off?
3.Is object localization for free - Weakly-supervised learning with convolutional neural networks
——弱监督做object detection的文章。首先fc layer当做conv layer与上面这篇文章思想一致。同时把最后max pooling之前的feature map看做包含class localization的信息,只不过从第五章“Does adding object-level supervision help classification”的结果看,效果虽好,但是这一物理解释可能不够完善。
4.Shape-Tailored Local Descriptors and Their Application to Segmentation andTracking
Authors: Naeemullah Khan, Marei Algarni, Anthony Yezzi, Ganesh Sundaramoorthi
5.Deep Filter Banks for Texture Recognition and Segmentation
Authors: Mircea Cimpoi, Subhransu Maji, Andrea Vedaldi
6.Deeply learned face representations are sparse, selective, and robust, Yi Sun, Xiaogang Wang, Xiaoou Tang
——DeepID系列之DeepID2+。在DeepID2之上的改进是增加了网络的规模(feature map数目),另外每一层都接入一个全连通层加supervision。最精彩的地方应该是后面对神经元性能的分析,发现了三个特点:1.中度稀疏最大化了区分性,并适合二值化;2.身份和attribute选择性;3.对遮挡的鲁棒性。这三个特点在模型训练时都没有显示或隐含地强加了约束,都是CNN自己学的。
Image and Video Processing and Restoration
1.Fast and Flexible Convolutional Sparse Coding
Authors: Felix Heide, Wolfgang Heidrich, Gordon Wetzstein
2.What do 15,000 Object Categories Tell Us About Classifying and Localizing Actions?
Authors: Mihir Jain, Jan C. van Gemert, Cees G. M. Snoek
——物品的分类对行为检测有帮助作用。这篇文章是第一篇关于这个话题进行探讨的,是个深坑,大家可以关注一下,考虑占坑。
3.Hypercolumns for Object Segmentation and Fine-Grained Localization
Authors:Bharath Hariharan, Pablo Arbeláez, Ross Girshick, Jitendra Malik
——一个很好的思路!以前的CNN或者R-CNN,我们总是用最后一层作为class label,倒数第二层作为feature。这篇文章的作者想到利用每一层的信息。因为对于每一个pixel来讲,在所有层数上它都有被激发和不被激发两种态,作者利用了每一层的激发态作为一个feature vector来帮助自己做精细的物体检测。
3D Models and Images
1.The Stitched Puppet: A Graphical Model of 3D Human Shape and Pose
Authors: Silvia Zuffi, Michael J. Black
2.3D Shape Estimation From 2D Landmarks: A Convex Relaxation Approach
Authors: Xiaowei Zhou, Spyridon Leonardos, Xiaoyan Hu, Kostas Daniilidis
Images and Language
这个类别的文章需要好好看看,对思路的发散很有帮助
1.Show and Tell: A Neural Image Caption Generator
Authors: Oriol Vinyals, Alexander Toshev, Samy Bengio, Dumitru Erhan
2.Deep Visual-Semantic Alignments for Generating Image Descriptions
Authors: Andrej Karpathy, Li Fei-Fei
3.Long-Term Recurrent Convolutional Networks for Visual Recognition and Description
Authors: Jeffrey Donahue, Lisa Anne Hendricks, Sergio Guadarrama, Marcus Rohrbach, Subhashini Venugopalan, Kate Saenko, Trevor Darrell
4.Becoming the Expert - Interactive Multi-Class Machine Teaching
Authors: Edward Johns, Oisin Mac Aodha, Gabriel J. Brostow
其它
参考文献一:CNN卷积神经网络的改进(15年最新paper):
http://blog.csdn.net/u010402786/article/details/50499864
文章中的四篇文章也值得一读,其中一篇在上面出现过。一定要自己下载下来看一看。
参考文献二:这是另外一个博主的博客,也是对CVPR的文章进行了整理:
http://blog.csdn.net/jwh_bupt/article/details/46916653
今天要跟大家分享的是一些 Convolutional Neural Networks(CNN)的工作。大家都知道,CNN 最早提出时,是以一定的人眼生理结构为基础,然后逐渐定下来了一些经典的架构——convolutional 和 pooling 的交替,最后再加上几个 fully-connected layers 用作最后做 prediction 等的输出。然而,如果我们能“反思”经典,深入剖析这些经典架构中的不同 component 的作用,甚至去改进它们,有时候可能有更多的发现。所以,今天分享的内容,便是改进 CNN 的一些工作。
Striving For Simplicity:The All Convolutional Net
先说一篇探究 CNN 中不同 component 的重要性和作用的工作。这篇工作发表于 ICLR 2015,已经有一年多的时间了。个人觉得它应该受到更大的关注。这篇工作最大的贡献是,把经典架构的 CNN 中的 pooling 层,用 stride convolutional 层给替换掉了,也就是去掉了 deterministic 层。并且,通过数学公式和实验结果证明,这样的替换是完全不会损伤性能的。而加入 pooling 层,如果不慎,甚至是有伤性能的。
具体来看,CNN 中的每次 feature map 表达,都可以看做一个 W*H*N 的三维结构。在这个三维结构下,pooling 这种 subsampling 的操作,可以看成是一个用 p-norm(当 p 趋向于正无穷时,就是我们最常见的 max-pooling)当做 activation function 的 convolutional 操作。有了这样的解释,自然而然地,就会提出一个问题:那么引入这样的 pooling 操作,有什么意义呢?真的有必要么?在过去的工作中,大家普遍认为,pooling 层有三种可能的功效:(1)提取更 invariant 的 feature;(2)抽取更广范围的(global)的 feature——即 spatially dimension reduction;(3)更方便优化。这篇作者认为,其中(2)是对 CNN 最重要的。基于此,它们就提出,那么我只要在去掉 pooling 层的同时,保证这种 spatially dimension reduction——是否就可以构造出一个all convolutional net,同时这个 net 的效果还不比 convolutional + pooling 交替的差?
最后,果然,如他们所料。它们的 all convolutional net 达到了甚至有时候超过了 state-of-art,同时他们还发现有时候加入 pooling 反而不如不加。这篇工作的另外一个贡献是他们提出了一种新的 visualizing CNN 的方法,效果更直观更有分辨性。总结来说,这篇工作提出的 all convolutional net 可以实现自主 downsampling,并且效果不差;其二,它不是在说 pooling 不好,我们一定要抛弃;而是对于 minimum necessary ingredients for CNN 进行了探究。
Network in Network
第一个要分享的是如何去 replace pooling layer after convolutional layer,接下来要分享的是 replace fully-connected layer on the top of CNN。这个也是经典的 CNN 架构中的一个组成部分。也许这个东西大家还不熟悉,但是提到另一个词,大家就会很熟悉了。那就是,dropout。已经有非常多的工作,在 CNN 的 fully-connected layer 中,加入 dropout,来避免 overfitting。受此启发,后来又有了一个 sparse convolutional neural networks 的工作。然而,更具开创性的工作是,《Network in Network》这篇,提出了用global averaging pooling layer替代 fully-connected layer.
这样的 global averaging pooling layer 显然,可以把 input/feature map 和 output/category,也就可以达到减少 overfitting 的作用(和 dropout 一样)。
现在,global average pooling 已经被用得很广泛,比如在《Going Deeper with Convolutions》中,作者指出:
We found that a move from fully connected
layers to average pooling improved the top-1 accuracy by
about 0.6%, however the use of dropout remained essential
even after removing the fully connected layers.
当然它也有它自己的一定弊端,比如 convergence 会变慢。但是关于 fully-connected layer 是否一定是必须的这个问题,却在被各种工作和各种场景探究。比如 Google 去年非常火的 inceptionism 的工作中,也放弃了 fully-connected layer,并达到了很好的效果。
所以,关于这点,小S 是认为,我们不要光看表面的 dropout or global averaging pooling 这些技术,而是要去思考它们的共同之处和它们的原理。从它们带给网络结构的变化入手。也许现在来看,最初的结论还是对的,deeper is better,我们暂时要解决的是如何 deeper。
Spatial Transformer Networks
这篇是 NIPS 2015 中,来自 Google DeepMind 的工作。这篇也被前几天 huho larochelle 评选出的 Top 10 arXiv 2015 Deep Learning Papers 收录(另外提一下,昨天看到这个评选,发现大部分我都写过笔记了,大家如果感兴趣,我可以单独整理一份,以供大家查阅)。回到这篇工作上来,它主要是说,尽管 CNN 一直号称可以做 spatial invariant feature extraction,但是这种 invariant 是很有局限性的。因为 CNN 的 max-pooling 首先只是在一个非常小的、rigid 的范围内(2×2 pixels)进行,其次即使是 stacked 以后,也需要非常 deep 才可以得到大一点范围的 invariant feature,三者来说,相比 attention 那种只能抽取 relevant 的 feature,我们需要的是更广范围的、更 canonical 的 features。为此它们提出了一种新的完全 self-contained transformation module,可以加入在网络中的任何地方,灵活高效地提取 invariant image features.
具体上,这个 module 就叫做 Spatial Transformers,由三个部分组成: Localization Network, Grid generator 和 Sampler。Localization Network 非常灵活,可以认为是一个非常 general 的进一步生成 feature map 和 map 对应的 parameter 的网络。因此,它不局限于用某一种特定的 network,但是它要求在 network 最后有一层 regression,因为需要将 feature map 的 parameter 输出到下一个部分:Grid generator。Grid generator 可以说是 Spatial Transformers 的核心,它主要就是生成一种“蒙版”,用于“抠图”(Photoshop 附体……)。Grid generator 定义了 Transformer function,这个 function 的决定了能不能提取好 invariant features。如果是 regular grid,就好像一张四四方方没有倾斜的蒙版,是 affined grid,就可以把蒙版“扭曲”变换,从而提取出和这个蒙版“变换”一致的特征。在这个工作中,只需要六个参数就可以把 cropping, translation, rotation, scale and skew 这几种 transformation 都涵盖进去,还是很强大的;而最后的 Sampler 就很好理解了,就是用于把“图”抠出来。
这个工作有非常多的优点:(1)它是 self-contained module,可以加在网络中的任何地方,加任何数量,不需要改变原网络;(2)它是 differentiable 的,所以可以直接进行各种 end-to-end 的训练;(3)它这个 differentiable simple and fast,所以不会使得原有网络变慢;(4)相比于 pooling 和 attention 机制,它抽取出的 invariant features 更 general。
Stacked What-Where Auto-encoders
这篇文章来自 NYU,Yann LeCun 组,已投稿到 ICLR 2016。与之前整理过的 improving information flow in Seq2Seq between encoder-decoder 类似的是,这篇文章主要是改进了基于 CNN 的 encoder-decoder,并非常 intuitive 的讨论了不同 regularizer 的区别。架构图可以直接看 Figure 1 的右侧,会比较清晰。具体来讲,Stacked What-Where Auto-encoders(SWWAE) 基于前向 Convnet 和前向 Deconvnet,并将 max-pooling 的输出称为 “what”,其实就是将 max function 的 content 和 position 传给下一层;同时,max-pooling 中的 position/location 信息,也就是 argmax function,作为 “where” 要“横向”传给 decoder。这样,在进行 decoder reconstruct 的过程时,则更能基于 where + what 的组合,进行 unpooling。
为了能让网络利用好 what 和 where,文章考虑了三种 loss,见公式(1),即传统的 discriminate loss,和新增的 input-level reconstruction loss for “what” 还有 intermediate-level reconstruction loss for “where”。
如上文所说,文章的 Section 3 很 intuitive,首先说明并解了为什么使用的是 soft version 的 max/argmax 去进行 ”what“ 和 ”where“;第二,讨论了为何加入 reconstruction loss 和这样一个 hybird loss function 更好(generalization 和 robustness);第三,说明了 intermediate loss 对于“what”“where”一起学习的重要性。
实验结果上来看,这样的 SWWAE 模型 generate 出来的图片更清晰,更“干净”(clearer and cleaner)。
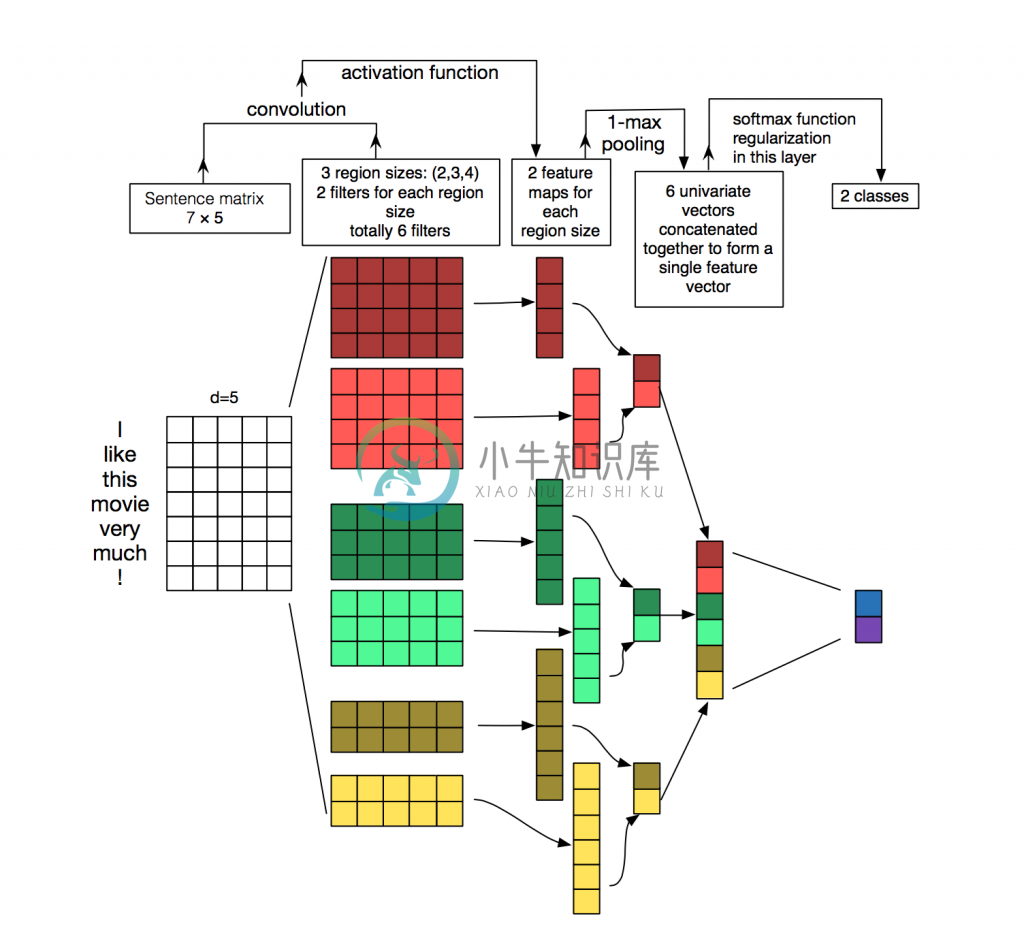
CNN for NLP