过拟合数学原理与解决方案
正则化方法:防止过拟合,提高泛化能力
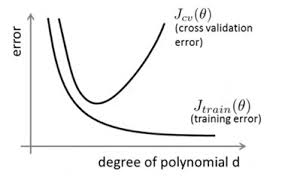
在机器学习各种模型训练数据不够多时,或者overtraining时,常常会导致overfitting(过拟合)。其直观的表现如下图所示,随着训练过程的进行,模型复杂度增加,在training data上的error渐渐减小,但是在验证集上的error却反而渐渐增大——因为训练出来的网络过拟合了训练集,对训练集外的数据却不work。
为了防止overfitting,可以用的方法有很多,下文就将以此展开。有一个概念需要先说明,在机器学习算法中,我们常常将原始数据集分为三部分:training data、validation data,testing data。
这个validation data是什么?它其实就是用来避免过拟合的,在训练过程中,我们通常用它来确定一些超参数(比如根据validation data上的accuracy来确定early stopping的epoch大小、根据validation data确定learning rate等等)。那为啥不直接在testing data上做这些呢?因为如果在testing data做这些,那么随着训练的进行,我们的网络实际上就是在一点一点地overfitting我们的testing data,导致最后得到的testing accuracy没有任何参考意义。因此,training data的作用是计算梯度更新权重,validation data如上所述,testing data则给出一个accuracy以判断网络的好坏。
避免过拟合的方法有很多:early stopping、数据集扩增(Data augmentation)、正则化(Regularization)包括L1、L2(L2 regularization也叫weight decay),dropout。
L2 regularization(权重衰减)
L2正则化就是在代价函数后面再加上一个正则化项:
C0代表原始的代价函数,后面那一项就是L2正则化项,它是这样来的:所有参数w的平方的和,除以训练集的样本大小n。λ就是正则项系数,权衡正则项与C0项的比重。另外还有一个系数1/2,1/2经常会看到,主要是为了后面求导的结果方便,后面那一项求导会产生一个2,与1/2相乘刚好凑整。
L2正则化项是怎么避免overfitting的呢?我们推导一下看看,先求导:
可以发现L2正则化项对b的更新没有影响,但是对于w的更新有影响:
在不使用L2正则化时,求导结果中w前系数为1,现在w前面系数为 1−ηλ/n ,因为η、λ、n都是正的,所以 1−ηλ/n小于1,它的效果是减小w,这也就是权重衰减(weight decay)的由来。当然考虑到后面的导数项,w最终的值可能增大也可能减小。
另外,需要提一下,对于基于mini-batch的随机梯度下降,w和b更新的公式跟上面给出的有点不同:
对比上面w的更新公式,可以发现后面那一项变了,变成所有导数加和,乘以η再除以m,m是一个mini-batch中样本的个数。
到目前为止,我们只是解释了L2正则化项有让w“变小”的效果,但是还没解释为什么w“变小”可以防止overfitting?一个所谓“显而易见”的解释就是:更小的权值w,从某种意义上说,表示网络的复杂度更低,对数据的拟合刚刚好(这个法则也叫做奥卡姆剃刀),而在实际应用中,也验证了这一点,L2正则化的效果往往好于未经正则化的效果。当然,对于很多人(包括我)来说,这个解释似乎不那么显而易见,所以这里添加一个稍微数学一点的解释(引自知乎):
过拟合的时候,拟合函数的系数往往非常大,为什么?如下图所示,过拟合,就是拟合函数需要顾忌每一个点,最终形成的拟合函数波动很大。在某些很小的区间里,函数值的变化很剧烈。这就意味着函数在某些小区间里的导数值(绝对值)非常大,由于自变量值可大可小,所以只有系数足够大,才能保证导数值很大。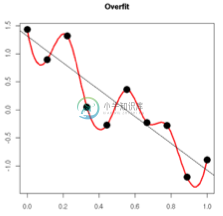
而正则化是通过约束参数的范数使其不要太大,所以可以在一定程度上减少过拟合情况。
L1 regularization
在原始的代价函数后面加上一个L1正则化项,即所有权重w的绝对值的和,乘以λ/n(这里不像L2正则化项那样,需要再乘以1/2,具体原因上面已经说过。)
同样先计算导数:
上式中sgn(w)表示w的符号。那么权重w的更新规则为:
比原始的更新规则多出了η * λ * sgn(w)/n这一项。当w为正时,更新后的w变小。当w为负时,更新后的w变大——因此它的效果就是让w往0靠,使网络中的权重尽可能为0,也就相当于减小了网络复杂度,防止过拟合。
另外,上面没有提到一个问题,当w为0时怎么办?当w等于0时,|W|是不可导的,所以我们只能按照原始的未经正则化的方法去更新w,这就相当于去掉η*λ*sgn(w)/n这一项,所以我们可以规定sgn(0)=0,这样就把w=0的情况也统一进来了。(在编程的时候,令sgn(0)=0,sgn(w>0)=1,sgn(w<0)=-1)
Early stopping
Early stopping方法的具体做法是,在每一个Epoch结束时(一个Epoch集为对所有的训练数据的一轮遍历)计算validation data的accuracy,当accuracy不再提高时,就停止训练。这种做法很符合直观感受,因为accurary都不再提高了,在继续训练也是无益的,只会提高训练的时间。那么该做法的一个重点便是怎样才认为validation accurary不再提高了呢?并不是说validation accuracy一降下来便认为不再提高了,因为可能经过这个Epoch后,accuracy降低了,但是随后的Epoch又让accuracy又上去了,所以不能根据一两次的连续降低就判断不再提高。一般的做法是,在训练的过程中,记录到目前为止最好的validation accuracy,当连续10次Epoch(或者更多次)没达到最佳accuracy时,则可以认为accuracy不再提高了。此时便可以停止迭代了(Early Stopping)。这种策略也称为“No-improvement-in-n”,n即Epoch的次数,可以根据实际情况取,如10、20、30……
Dropout
L1、L2正则化是通过修改代价函数来实现的,而Dropout则是通过修改神经网络本身来实现的,它是在训练网络时用的一种技巧(trike)。它的流程如下:
假设我们要训练上图这个网络,在训练开始时,我们随机地“删除”一半的隐层单元,视它们为不存在,得到如下的网络:
保持输入输出层不变,按照BP算法更新上图神经网络中的权值(虚线连接的单元不更新,因为它们被“临时删除”了)。
以上就是一次迭代的过程,在第二次迭代中,也用同样的方法,只不过这次删除的那一半隐层单元,跟上一次删除掉的肯定是不一样的,因为我们每一次迭代都是“随机”地去删掉一半。第三次、第四次……都是这样,直至训练结束。
以上就是Dropout,它为什么有助于防止过拟合呢?可以简单地这样解释,运用了dropout的训练过程,相当于训练了很多个只有半数隐层单元的神经网络(后面简称为“半数网络”),每一个这样的半数网络,都可以给出一个分类结果,这些结果有的是正确的,有的是错误的。随着训练的进行,大部分半数网络都可以给出正确的分类结果,那么少数的错误分类结果就不会对最终结果造成大的影响。
更加深入地理解,可以看看Hinton和Alex两牛2012的论文《ImageNet Classification with Deep Convolutional Neural Networks》
数据集扩增(data augmentation)
“有时候不是因为算法好赢了,而是因为拥有更多的数据才赢了。”
不记得原话是哪位大牛说的了,hinton?从中可见训练数据有多么重要,特别是在深度学习方法中,更多的训练数据,意味着可以用更深的网络,训练出更好的模型。
既然这样,收集更多的数据不就行啦?如果能够收集更多可以用的数据,当然好。但是很多时候,收集更多的数据意味着需要耗费更多的人力物力,有弄过人工标注的同学就知道,效率特别低,简直是粗活。
所以,可以在原始数据上做些改动,得到更多的数据,以图片数据集举例,可以做各种变换,如:
将原始图片旋转一个小角度
添加随机噪声
一些有弹性的畸变(elastic distortions),论文《Best practices for convolutional neural networks applied to visual document analysis》对MNIST做了各种变种扩增。
截取(crop)原始图片的一部分。比如DeepID中,从一副人脸图中,截取出了100个小patch作为训练数据,极大地增加了数据集。感兴趣的可以看《Deep learning face representation from predicting 10,000 classes》.
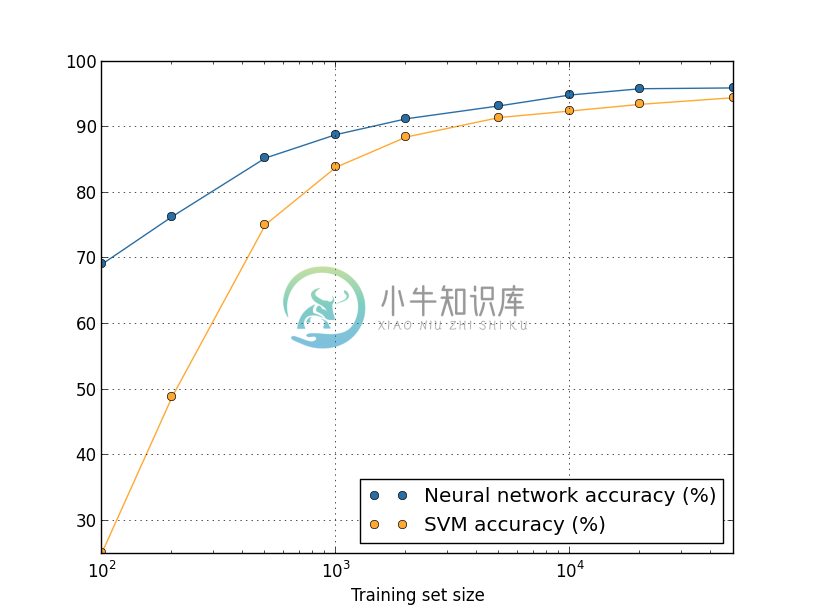
更多数据意味着什么?
用50000个MNIST的样本训练SVM得出的accuracy94.48%,用5000个MNIST的样本训练NN得出accuracy为93.24%,所以更多的数据可以使算法表现得更好。在机器学习中,算法本身并不能决出胜负,不能武断地说这些算法谁优谁劣,因为数据对算法性能的影响很大。