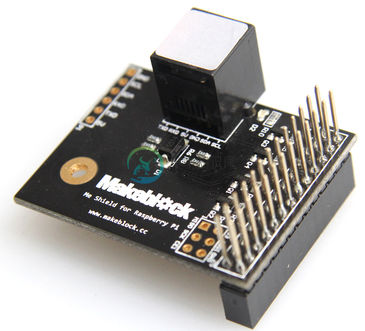
树莓派转接板
描述
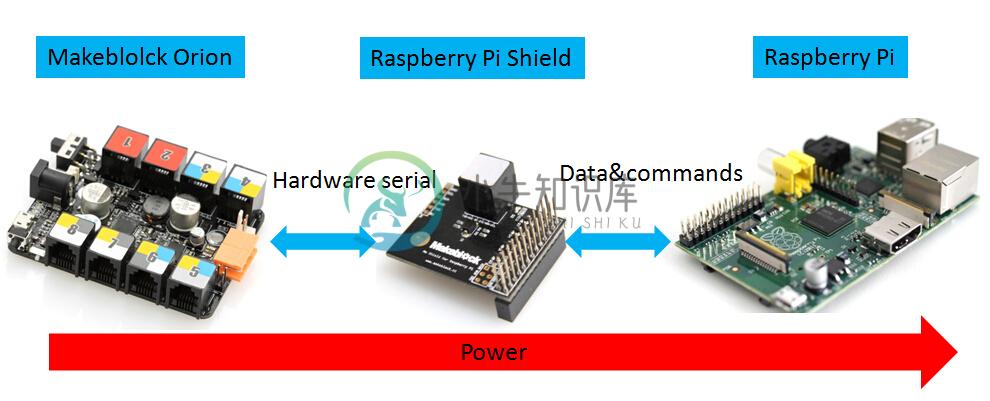
树莓派转接板是附着在树莓派板上给 baseboard 或 Orion 访问与硬件串行通信。
特点
- 不需要电焊就可以使用
- 支持Python编程
- 兼容模型 A,B, B+
- 带有一个RJ25连接器可连接Baseboard 或Orion板
- 带有金属座,不需占有通用输入输出口
规格
- 尺寸: 45 x 35 x 27 mm (长 x 宽 x 高)
用户指导
开始
建议阅读
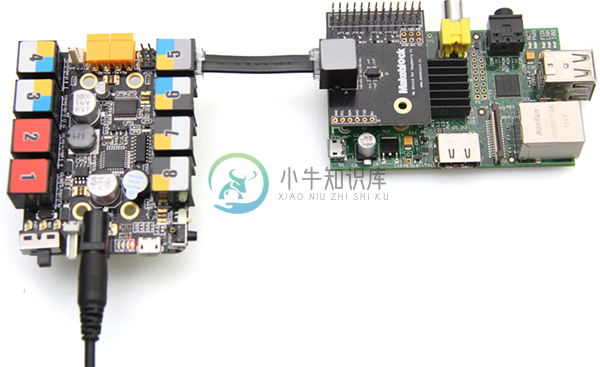
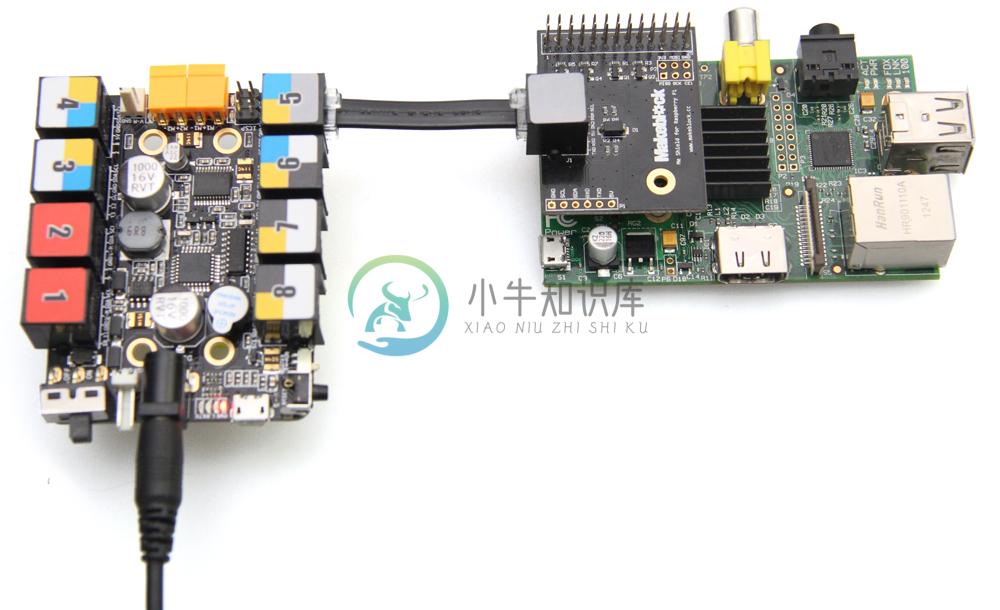
步骤 1 连线
确保你已经在树莓派上安装了操作系统映像,并通过以太网线将树莓派连接到互联网上。在你的树莓派上滑动我的转接板,并将转接板连接到 baseboard 的端口4 (Leonardo) 或 Makeblock Orion 端口5(Uno)。接下来,在baseboard上电源或 Makeblock Orion 与12V电源。(转接板已经为树莓派板提供了5V电压,所以不需要对树莓派板单独使用)
步骤 2 登入树莓派
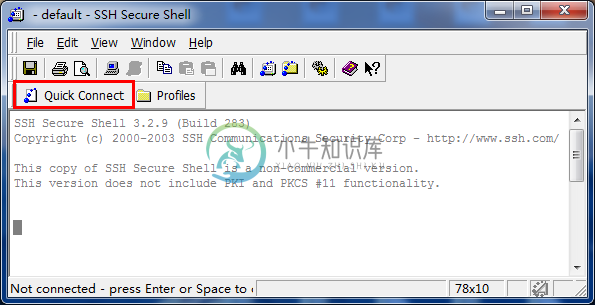
如果你使用windows系统,那么你需要下载一个免费SSH软件(windows)这里。
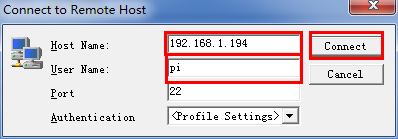
然后点击按纽“快速连接”来登录,输入IP,用户名,密码(用户名:pi,密码:raspberry)

如果您在 Mac 或 linux 上,则在树莓派上打开一个带有samba服务的终端。在终端窗口中键入下面的命令。
ssh pi@<your-rpi-ip>
更多有用文档:http://www.raspberrypi.org/documentation/remote-access/ssh/unix.md.
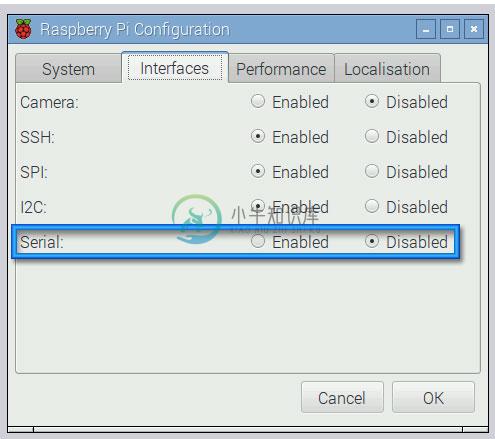
步骤 3禁用被占用硬件串行ttyAMA0。
请确保在您的rip上安装了pyserial,如果不是,请键入下面的命令并等待过程完成。
sudo apt-get install python-serial
在树莓派上,禁用登录提示。
步骤 4 安装 Makeblock 的 Python 库
输入以下命令来安装库:
sudo pip install megapi
Python原始代码:
from megapi import *
bot = Megapi()
bot.start() # if using usb cable, need to call bot.start('/dev/ttyACM0')
python your code
步骤 5 上传一个Arduino固件到 Baseboard 或 Orion.
下载 Arduino 库:https://github.com/Makeblock-official/Makeblock-Libraries/archive/master.zip
将 Makeblock 文件夹复制到你的 Arduino 默认库。您的 Arduino 库文件夹现在应该是这样的:
- (On Windows): [x:\Users\XXX\Documents]\Arduino\libraries\makeblock\src
- (On Mac OSX): [\Users\XXX\Documents]\Arduino\libraries\makeblock\src
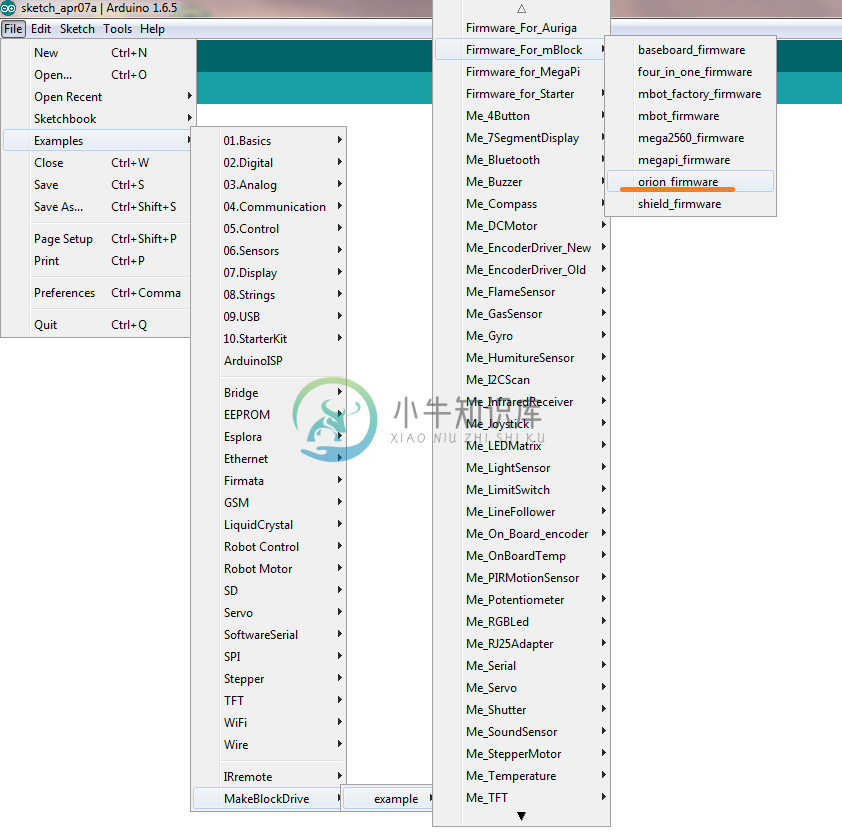
打开 Arduino IDE,从File>example中选择固件;根据您的控制板类型(在本例中是Orion)。
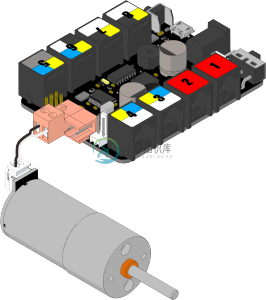
步骤 6 连接一个电机到Orion板上的端口M1 .
确保那块板是由外部提供电源的。
步骤 7 在raspberry Pi运行演示脚本
进入脚本的目录和运行 motorRun.py 文件
cd PythonForMegaPi
cd examples
python motorRun.py
Python API
- Start
- MegaPi()
- start()
- GPIO
- digitalWrite( pin, level )
- pwmWrite( pin, pwm )
- digitalRead( pin, def onResult )
- analogRead( pin, def onResult )
- Motion
- DC Motor
- motorRun( port, speed )
- motorMove( leftspeed, rightspeed )
- Servo Motor
- servoRun( port, slot, angle )
- Encoder Motor
- encoderMotorRun( port, speed )
- encoderMotorMove( port, speed, distance, def onFinish )
- encoderMotorMoveTo( port, speed, position, def onFinish )
- Stepper Motor
- stepperMotorSetting( port, microsteps, acceleration )
- stepperMotorRun( port, speed )
- stepperMotorMove( port, speed, distance, def onFinish )
- stepperMotorMoveTo( port, speed, position, def onFinish )
- DC Motor
- Sensors
- Ultrasonic Sensor
- ultrasonicSensorRead ( port, def onResult )
- LineFollow Sensor
- lineFollowerRead ( port, def onResult )
- Light Sensor
- lightSensorRead ( port, def onResult )
- Sound Sensor
- soundSensorRead ( port, def onResult )
- Temperature Sensor
- temperatureRead ( port, def onResult )
- PIR Motion Sensor
- pirMotionSensorRead ( port, def onResult )
- Touch Sensor
- touchSensorRead ( port, def onResult )
- LimitSwitch
- limitSwitchRead ( port, slot, def onResult )
- Humiture Sensor
- humitureSensorRead ( port, type, def onResult )
- Gas Sensor
- gasSensorRead ( port, def onResult )
- Flame Sensor
- flameSensorRead ( port, def onResult )
- Button
- buttonRead ( port, def onResult )
- Potentiometer
- potentiometerRead ( port, def onResult )
- Joystick
- joystickRead ( port, axis, def onResult )
- 3-Axis Accelerometer and Gyro Sensor
- gyroRead ( axis, def onResult )
- Compass
- compassRead ( def onResult )
- Ultrasonic Sensor
- Display
- RGB Led
- rgbLedSetColor ( port, slot, index, r, g, b )
- rgbLedShow ( port, slot )
- rgbLedDisplay ( port, slot, index, r, g, b )
- 7-segment Display
- sevenSegmentDisplay ( port, value )
- Led Matrix Display
- ledMatrixDisplayMessage ( port, x, y, msg )
- ledMatrixDisplayRaw ( port, buffer )
- Serial LCD Display
- lcdDisplay ( string )
- RGB Led
- Others
- DSLR Shutter
- shutterOn ( port )
- shutterOff ( port )
- focusOn ( port )
- focusOff ( port )
- DSLR Shutter
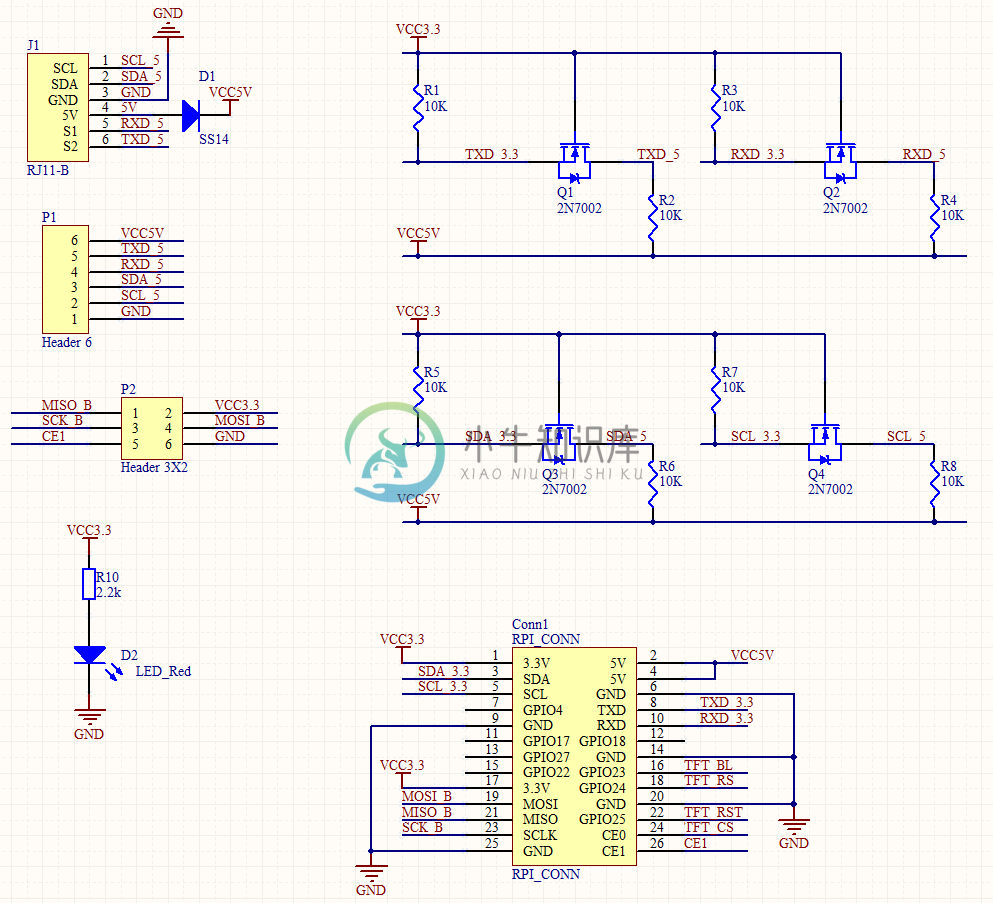
原理图