指南针模块


概述
- 工作电压:5V;
- 通信接口:I2C通信(I2C地址固定为0x1E);
- 罗盘精度:理想条件下精确到1°~2°但实际使用环境部分角度在10°~15°;
- 磁场测量范围:-8高斯~ +8高斯(精度为:2毫高斯);
- 极限性能:反接到主控板的电机端口时,不会导致模块和主控板损坏
- 校准功能:模块上具有用于校准的按键和指示灯,当模块周围的机械结构或模块的安装位置(方向)发生改变时,用户可以通过下载我们的程序库并简单操作按键就可校准,以使得模块在新的环境下能准确测量出角度值,使本模块简单易用。
硬件介绍
- 将指南针模块接入控制板任意的I2C接口(电机口除外),红色指示灯亮起说明电源供电正常。
- DIY孔用户可以自己焊接排针用于扩展。
- 校正按键和校正指示灯用来指示校准。
- 4个4MM安装孔可以固定在 Makeblock 机械套件上。
引脚定义
指南针模块有六根引脚,它们的功能如下:
| 序号 | 引脚 | 功能 |
|---|---|---|
| 1 | GND | 地线 |
| 2 | VCC | 电源线 |
| 3 | SDA | I2C数据口 |
| 4 | SCL | I2C时钟口 |
| 5 | RDY | 决定数据收集与否 |
| 6 | KEY | 决定是否按了校准键 |
连线方式
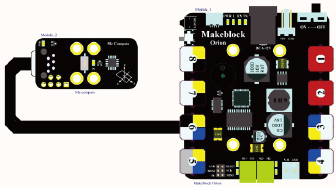
● RJ25连接
模块需要连接到带有白色标签的端口上,模块可以用RJ25线连接到Orion板,比如连到3, 4, 6, 7,和 8口:
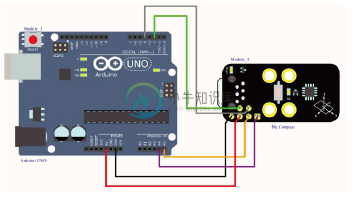
● 杜邦线连接
当用杜邦线连到 Arduino UNO 板时 , 它的 SCL 和 SDA 引脚应该连到I2C端口,即A5和A4口如下:
编程指导
● Arduino 编程
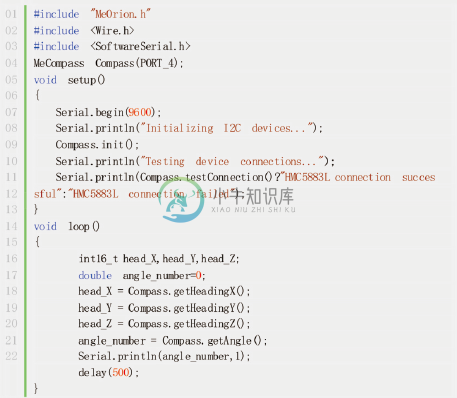
如果使用 Arduino 写一个程序,Makeblock-Library-master 库可调用来控制指南针模块。
这个例程读取指南针检测到的角度值,并通过 Arduino 编程将结果输出到串行监视器。
将代码段上传到 Makeblock Orion,点击 Arduino 串口监视器,就可以看到运行结果。
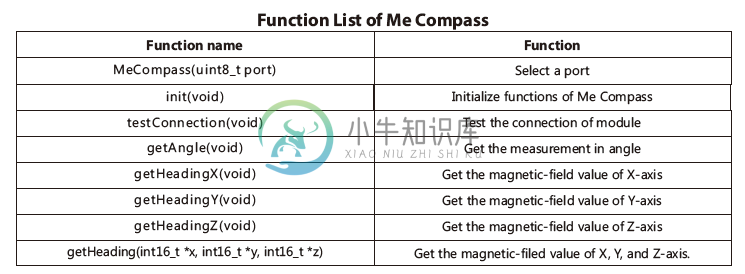
库函数
void init(void); //指南针初始化函数
bool testConnection(void); //模块连接检测函数
double getAngle(void); //获取角度测量值
int16\_t getHeadingX(void); //获取X轴磁场测量值
int16\_t getHeadingY(void); //获取Y轴磁场测量值
int16\_t getHeadingZ(void); //获取Z轴磁场测量值
void getHeading(int16\_t \*x, int16\_t \*y, int16\_t \*z);
//同时获取X、Y、Z轴磁场测量值
注意事项
指南针模块对周围磁场的变化比较敏感。因此,周围的机械结构会发生变化,或者组装方式可能会导致环境的变化磁场,从而指南针模块测量结果的偏差。在这种情况下,用户需要在当前环境下校准模块以获得正确的角度值。
模块校正流程:
1)将指南针模块正确连接到Orion板上,打开电源,然后下载我们提供的任何一个指南针库。
2)按下模块上的按键,直到模块的蓝灯开始闪烁,然后松开按键。
3)在蓝光闪烁过程中,将模块(包括与其连接的机械结构)沿水平面平稳旋转360°以上。
4)旋转后,按模块上的键退出校准。 模块上的蓝灯将亮起。
备注:
1)指南针的两种模式:测量模式→蓝灯亮起; 校准模式→蓝灯闪烁;
2)如果在当前情况下已经校准过模块,则在断电再次上电后不需要校准模块
3)如果您不打算校准模块,请不要按下模块上的按钮,否则会使之前的校准失效
4)在校准过程中,确保模块(包括与之连接的机械结构)沿水平面旋转超过360°。否则,校准将无法工作。
原理分析
传统的指南针使用一个磁化针来感应地球的磁场。磁场和针之间的磁力旋转针,直到针与地球磁场的水平分量(北和南)对齐。这也适用于电子罗盘,除了用磁阻传感器代替针。磁阻传感器将它接收的地磁信号转换成数字信号并输出使用。
3轴数字罗盘由3轴磁阻传感器,2轴倾斜传感器和MCU组成。三轴磁阻传感器用于测量磁场;倾斜传感器用于在磁力计不处于水平状态时进行补偿; MCU负责分析磁力仪和倾斜传感器输出的信号,输出数据,补偿软铁和硬铁。三个互相垂直的磁阻传感器检测地磁场各自轴向的强度。模拟输出将被放大并传送到MCU。
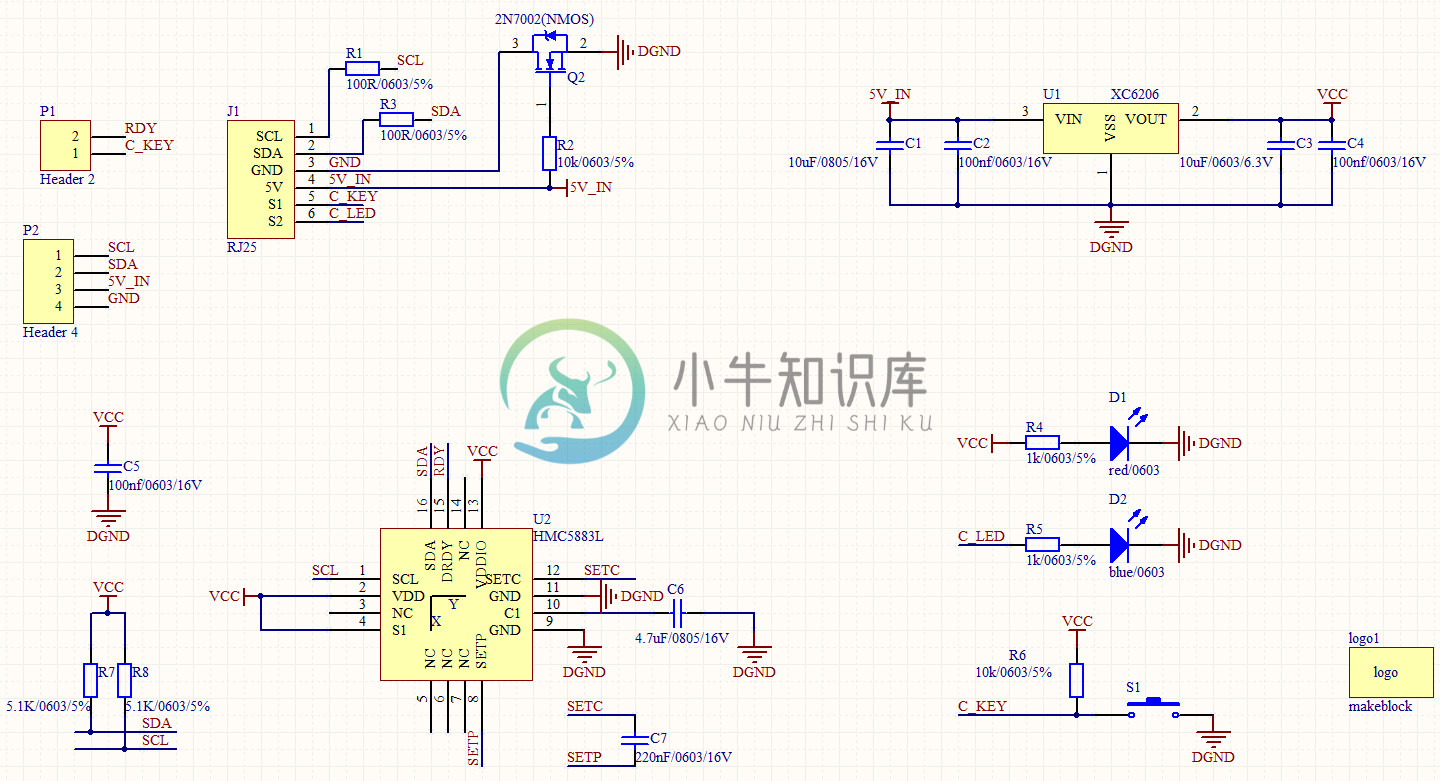
原理图