
输出类模块
该部分 API 将帮助您使用输出类 mBuild 电子模块。 注意:你需要额外购买包含 mBuild 电子模块扩展包或套装来获得 mBuild 模块以使用这些功能。

省略代码中的halocode
注意:该部分 API 省略了“halocode.”,本篇提及的所有 API 均省略了“halocode.” ,如 led_driver.off( )实际为halocode.led_driver.off()。mBuild 电子模块平台的所有功能均维护在halocode库中,因此我们推荐如下写法,以便将halocode.进行省略,使得代码更简洁。
from halocode import *
通用参数index
所有的 mbuild 电子模块的 API 均有一个参数index,它代表 API 指向的链上的第几个同类型模块。一般,具有默认值1。因此,当链上的每种模块只使用到一个时,你无需关注和独立设置它。 而当链上出现两个同类型模块时,你需要让index等于2、3、4甚至其他数字,以便控制链上的第2个、第3个,甚至第4个同类型模块,比如,motor_driver.set(100, index = 2)表示将链上第二个电机驱动的输出动力变为100。
灯光类
LED 点阵
led_matrix.show(image = "hi", index = 1)
设置 LED 点阵屏显示图像,参数:
- image 字符串,默认值为"hello",image = "hi" 时字符串对应的点阵图像如下:
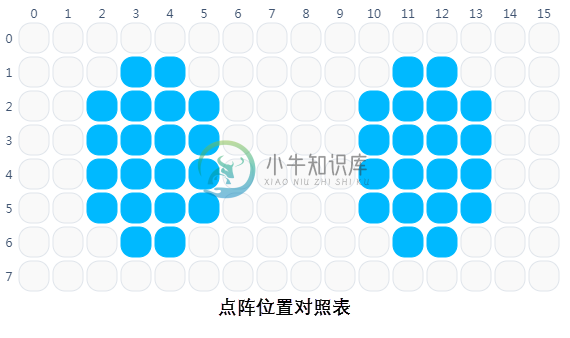
若需要让点阵屏显示非预置的图像,则需要以字符串形式填写自定义图像对应的十六进制数,生成规则如下: 将每列的8颗LED的亮灭状态看做一个8位的2进制数,将该8位2进制数转换为两位的十六进制数,点阵共16列即可以32位16进制数来表示点阵的亮灭状态。
程序示例1
from halocode import *
led_matrix.show(image = "hello", index = 1) #让 LED 点阵屏现实 "hello" 表情。
程序示例2
from halocode import *
led_matrix.show(image = "00003c7e7e3c000000003c7e7e3c0000", index = 1)
#让 LED 点阵屏现实 "hello" 表情。
led_matrix.print(message, index = 1)
LED 点阵屏滚动显示字符信息,参数:
- message 字符串,有效范围为任意英文字母、数字、标点的组合,不支持中文,当需要显示的信息超出 LED 点阵屏的显示范围时,字符串将滚动显示。
led_matrix.print_until_done(message, index = 1)
LED 点阵屏滚动显示字符信息直到结束,参数:
- message 字符串,有效范围为任意英文字母、数字、标点的组合,不支持中文,当需要显示的信息超出 LED 点阵屏的显示范围时,字符串将滚动显示,在滚动结束前,线程将阻塞。
led_matrix.print_at(message, x, y, index = 1)
LED 点阵屏以给定的 x、y 坐标为起点显示字符串信息,参数:
- message 字符串,有效范围为任意英文字母、数字、标点的组合,不支持中文,表示需要 LED 点阵显示的信息,当需要显示的信息超出 LED 点阵屏的显示范围时,字符串将滚动显示,在滚动结束前,线程将阻塞。
- x 数值,有效范围0 - 15,表示显示字符串的起始 x 轴坐标。
- y 数值,有效范围0 - 7,表示显示字符串的起始 y 轴坐标。
led_matrix.on(x, y, index = 1)
LED 点阵屏点亮特定位置的灯,参数:
- x 数值,有效范围0 - 15,表示要点亮的灯珠的 x 轴坐标。
- y 数值,有效范围0 - 7,表示要点亮的灯珠的 y 轴坐标。
led_matrix.off(x, y, index = 1)
LED 点阵屏熄灭特定位置的灯,参数:
- x 数值,有效范围0 - 15,表示要熄灭的灯珠的 x 轴坐标。
- y 数值,有效范围0 - 7,表示要熄灭的灯珠的 y 轴坐标。
led_matrix.toggle(x, y, index = 1)
LED 点阵屏切换特定位置的灯的点亮或熄灭状态,参数:
- x 数值,有效范围0 - 15,表示切换状态的灯珠的 x 轴坐标。
- y 数值,有效范围0 - 7,表示切换状态的灯珠的 y 轴坐标。
led_matrix.clear(index = 1)
将整个 LED 点阵屏上的所有灯都熄灭。
RGB 灯
rgb_led.on(r, g, b, index = 1)
设置 RGB 灯模块的颜色,参数:
- r 数值或字符串类型。
r 为数值时,有效范围是 0 - 255,表示全彩LED红色分量的数值,0时无红色分量,255时红色分量最亮。
r 为字符串类型时,表示颜色名称或缩写。颜色名称及其缩写对照表:
红 red r
橙 orange o
黄 yellow y
绿 green g
青 cyan c
蓝 blue b
紫 purple p
白 white w
黑 black k
- g 数值,全彩LED绿色分量的数值,参数范围是 0 ~ 255, 0为无绿色分量,255时绿色分量最亮。
- b 数值,全彩LED蓝色分量的数值,参数范围是 0 ~ 255, 0为无蓝色分量,255时蓝色分量最亮。
- pct 数值,灯环的亮度的大小,参数范围是0 ~ 100,默认值为 100。 0时灯环熄灭,100时灯环的按照设定的RGB值点亮。
rgb_led.off(index = 1)
熄灭 RGB 灯。
rgb_led.set_red(val, index = 1)
改变 RGB 灯的R值,参数:
- val 数值,有效范围0 -255,表示 RGB 灯模块R值改变后的大小。
rgb_led.set_green(val, index = 1)
改变 RGB 灯的G值,参数:
- val 数值,有效范围0 -255,表示 RGB 灯模块G值改变后的大小。
rgb_led.set_blue(val, index = 1)
改变 RGB 灯的B值,参数:
- val 数值,有效范围0 -255,表示 RGB 灯模块B值改变后的大小。
rgb_led.add_red(val, index = 1)
增加 RGB 灯的R值,参数:
- val 数值,有效范围-255 -255,表示 RGB 灯模块R值增加的大小。
rgb_led.add_green(val, index = 1)
增加 RGB 灯的G值,参数:
- val 数值,有效范围-255 -255,表示 RGB 灯模块G值增加的大小。
rgb_led.add_blue(val, index = 1)
增加 RGB 灯的B值,参数:
- val 数值,有效范围-255 -255,表示 RGB 灯模块B值增加的大小。
rgb_led.get_red(val, index = 1)
获得 RGB 灯模块当前颜色的R值。 返回数值,可能的范围为0 -255`。
rgb_led.get_green(index = 1)
获得 RGB 灯模块当前颜色的G值。 返回数值,可能的范围为0 -255。
rgb_led.get_blue(index = 1)
获得 RGB 灯模块当前颜色的B值。 返回数值,可能的范围为0 -255。
彩灯驱动
led_driver.on(r, g, b, id = "all", index = 1)
设置单颗或全部的灯珠颜色,参数:
- r 数值或字符串类型。
r 为数值时,有效范围是 0 - 255,表示全彩LED红色分量的数值,0时无红色分量,255时红色分量最亮。
r 为字符串类型时,表示颜色名称或缩写。颜色名称及其缩写对照表:
红 red r
橙 orange o
黄 yellow y
绿 green g
青 cyan c
蓝 blue b
紫 purple p
白 white w
黑 black k
- g 数值,全彩LED绿色分量的数值,参数范围是 0 ~ 255, 0为无绿色分量,255时绿色分量最亮。
- b 数值,全彩LED蓝色分量的数值,参数范围是 0 ~ 255, 0为无蓝色分量,255时蓝色分量最亮。
- id 字符串类型或数值,默认值为"all"。 id 为字符串类型时,有效值为"all",此时设置所有灯珠的颜色。
id 为数值时,有效范围为1-96,此时设置对应位置的灯珠的颜色。
led_driver.show(color, index = 1)
同时设置多颗灯珠为相应的颜色,参数:
- color 字符串类型,字符串格式需满足“color1 color2 color3 color4 color5 color6 color7 color8 color9 color10 color11 color12”,其中colorx为 "red"/"green"/"blue"/"yellow"/"cyan"/"purple"/"white"/"orange"/"black" 或是其缩写 "r"/"g"/"b"/"y"/"c"/"p"/"w"/"o"/"k"。颜色字符间以单个空格隔开。当颜色个数大于12时将被截断成12个。
led_driver.off(led_id = "all", index = 1)
熄灭指定 id 的灯珠,参数:
- id 字符串类型或数值,默认值为"all"。 id 为字符串类型时,有效值为"all",此时设置所有灯珠的颜色。
id 为数值时,有效范围为1-96,此时设置对应位置的灯珠的颜色。
led_driver.set_red(val, led_id = "all", index = 1)
改变指定位置灯珠的R值,参数:
- val 数值,有效范围0 -255,表示灯珠R值改变后的大小。
- id 字符串类型或数值,默认值为"all"。 id 为字符串类型时,有效值为"all",此时设置所有灯珠的颜色。
id 为数值时,有效范围为1-96,此时设置对应位置的灯珠的颜色。
led_driver.set_green(val, led_id = "all", index = 1)
改变指定位置灯珠的G值,参数:
- val 数值,有效范围0 -255,表示灯珠G值改变后的大小。
- id 字符串类型或数值,默认值为"all"。 id 为字符串类型时,有效值为"all",此时设置所有灯珠的颜色。
id 为数值时,有效范围为1-96,此时设置对应位置的灯珠的颜色。
led_driver.set_blue(val, led_id = "all", index = 1)
改变指定位置灯珠的B值,参数:
- val 数值,有效范围0 -255,表示灯珠B值改变后的大小。
- id 字符串类型或数值,默认值为"all"。 id 为字符串类型时,有效值为"all",此时设置所有灯珠的颜色。
id 为数值时,有效范围为1-96,此时设置对应位置的灯珠的颜色。
led_driver.add_red(val, led_id = "all", index = 1)
增加指定位置灯珠的R值,参数:
- val 数值,有效范围-255 -255,表示灯珠R值增加的大小。
- id 字符串类型或数值,默认值为"all"。 id 为字符串类型时,有效值为"all",此时设置所有灯珠的颜色。
id 为数值时,有效范围为1-96,此时设置对应位置的灯珠的颜色。
led_driver.add_green(val, led_id = "all", index = 1)
增加指定位置灯珠的G值,参数:
- val 数值,有效范围-255 -255,表示灯珠G值增加的大小。
- id 字符串类型或数值,默认值为"all"。 id 为字符串类型时,有效值为"all",此时设置所有灯珠的颜色。
id 为数值时,有效范围为1-96,此时设置对应位置的灯珠的颜色。
led_driver.add_blue(val, led_id = "all", index = 1)
增加指定位置灯珠的B值,参数:
- val 数值,有效范围-255 -255,表示灯珠B值增加的大小。
- id 字符串类型或数值,默认值为"all"。 id 为字符串类型时,有效值为"all",此时设置所有灯珠的颜色。
id 为数值时,有效范围为1-96,此时设置对应位置的灯珠的颜色。
led_driver.set_mode(mode = "steady", index = 50)
设置彩灯驱动的显示样式,参数:
- mode 字符串,有效值为 "steady":静态,此时灯珠正常显示;"breath":呼吸,此时灯珠会周期性地发生明亮变化;"marquee":跑马灯,此时灯条或灯环会循环滚动;
播放类
扬声器
speaker.mute(index = 1)
扬声器停止播放。
speaker.play_tone(freq, index = 1)
设置扬声器以特定频率持续鸣叫,参数:
- freq 数值,有效范围为20-20000,超出这一范围,蜂鸣器不发声,另外出于对人耳的保护(长时间处于过高频率声音的环境下会对耳朵造成损失),该蜂鸣器被限制了最高频率5000Hz,因此当freq的值介于5000-20000之间时,扬声器仍只播放5000Hz的声音。 另外,若希望以扬声器通过频率改变播放曲子,我们需要知道不同频率与音符的对应关系,以下是给到的参考:
| do / C | re / D | mi / E | fa / F | sol / G | la / A | si / B | |
|---|---|---|---|---|---|---|---|
| 2 | 65Hz | 73Hz | 82Hz | 87Hz | 98Hz | 110Hz | 123Hz |
| 3 | 131Hz | 147Hz | 165Hz | 175Hz | 196Hz | 220Hz | 247Hz |
| 4(标准中音) | 262Hz | 294Hz | 330Hz | 349Hz | 392Hz | 440Hz | 494Hz |
| 5 | 523Hz | 587Hz | 659Hz | 698Hz | 784Hz | 880Hz | 988Hz |
| 6 | 1047Hz | 1175Hz | 1319Hz | 1397Hz | 1568Hz | 1760Hz | 1976Hz |
| 7 | 2093Hz | 2349Hz | 2637Hz | 2794Hz | 3136Hz | 3520Hz | 3951Hz |
| 8 | 4186Hz | 4699Hz |
例:标准中音音高(第一国际高度)为: A4 = 440Hz。
哈哈我是注释,不会在浏览器中显示。 ['C2','65'], ['D2','73'], ['E2','82'], ['F2','87'], ['G2','98'], ['A2','110'], ['B2','123'], ['C3','131'], ['D3','147'], ['E3','165'], ['F3','175'], ['G3','196'], ['A3','220'], ['B3','247'], ['C4','262'], ['D4','294'], ['E4','330'], ['F4','349'], ['G4','392'], ['A4','440'], ['B4','494'], ['C5','523'], ['D5','587'], ['E5','659'], ['F5','698'], ['G5','784'], ['A5','880'], ['B5','988'], ['C6','1047'], ['D6','1175'], ['E6','1319'], ['F6','1397'],['G6','1568'], ['A6','1760'], ['B6','1976'], ['C7','2093'], ['D7','2349'], ['E7','2637'], ['F7','2794'],['G7','3136'], ['A7','3520'], ['B7','3951'], ['C8','4186'], ['D8','4699'],speaker.play_music(music, index = 1)
扬声器播放预置的或用户自定义的音频文件,参数:
- music 字符串,有效范围为任意4字节长度的英文数字、字母、标点的组合,代表需要播放的音频在扬声器中的文件名,扬声器只支持存放mp3类型的音频文件,该 API 不会持续阻塞当前线程。 该扬声器预置了大量短音频可供使用,它们的文件名和音频内容请点击下载 预置音效列表;若希望通过扬声器播放自定义的音频文件,请查看此链接:http://docs.makeblock.com/diy-platform/zh/mbuild/hardware/output-modules/speaker.html
speaker.play_music_until_done(music, index = 1)
扬声器播放预置的或用户自定义的音频文件,参数:
- music 字符串,有效范围为任意4字节长度的英文数字、字母、标点的组合,代表需要播放的音频在扬声器中的文件名,扬声器只支持存放mp3类型的音频文件,该 API 会持续阻塞当前线程直到音频播放完成。
speaker.set_vol(val, index = 1)
设置扬声器播放音乐的音量大小,参数:
- vol 数值,有效范围 0 - 100,表示设定的扬声器音量值。
speaker.add_vol(val, index = 1)
改变扬声器播放音乐的音量大小(扬声器播放特定频率声音的大小不会被改变),参数:
- vol 数值,有效范围-100 - 100,表示扬声器音量的改变值。
speaker.get_vol(index = 1)
获得扬声器的当前音量。
返回数值,可能范围为0-100,当范围值为100时,表示扬声器达到了其音量的最大值。
speaker.is_play(index = 1)
检测扬声器是否正在播放音乐。
返回布尔值,True:扬声器正在播放歌曲,False:扬声器不在播放歌曲。
动力类
电机驱动
motor_driver.set(power, index = 1)
设置电机驱动的输出功率,参数:
- power 数值,有效范围为-100 -100,表示电机驱动输出的功率大小,单位
%。电机驱动功率为100%时,对应1024的PWM波形。一般的,电机驱动输出正功率会使得电机以逆时针旋转,负功率会使电机以顺时针旋转。
motor_driver.add(power, index = 1)
增加电机驱动的输出功率,参数:
- power 数值,有效范围为-200 /~200,表示电机驱动增加的输出的功率大小,单位
%。电机驱动功率为100%时,对应1024的PWM波形。
motor_driver.get(index = 1)
获得电机驱动的当前的输出功率大小。
返回数值,可能范围为-100 - 100。
motor_driver.get_load(index = 1)
获得电机驱动的当前负载状况,负载会随着电机的实际转动的情况发生变化,当电机大负载运行或堵转时(短路也有可能造成高负载),电机驱动将检测到一个较大的负载值。
返回数值,可能范围为0 - 1024。
motor_driver.stop(index = 1)
电机驱动停止输出功率。
舵机驱动
servo_driver.set(angle, index = 1)
舵机驱动设置舵机的度数,参数:
- angle 数值,有效范围为0 - 180,单位
°,表示舵机转动到的角度。
servo_driver.add(angle, index = 1)
舵机驱动增加舵机的度数,参数:
- angle 数值,有效范围为-180 - 180,单位
°,表示舵机从当前位置转动的角度。
servo_driver.get(index = 1)
舵机驱动获得当前设置的度数。
返回数值,可能值为0 - 180,单位为°。
servo_driver.get_load(index = 1)
舵机驱动驱动获得当前负载,负载会随着舵机的实际转动的情况发生变化,当舵机以大负载运行或堵转时(短路也有可能造成高负载),舵机驱动将检测到一个较大的负载值。
返回数值,可能范围为0 - 1024。
servo_driver.release(index = 1)
舵机驱动释放角度,当舵机驱动释放角度后,舵机将可以在外力作用下被拧动,但此时 servo_driver.get(index)将无法正确获得舵机的度数。
智能伺服电机(12公斤级)
smart_servo.turn(angle, speed, index = 1)
智能舵机转动指定角度,该积木块会阻塞线程直至动作完成或被其他指令打断,参数:
- angle 数值,表示舵机在当前位置基础上转过的角度,当该数值为正时,舵机顺时针转动,当该数值为负时,舵机逆时针转动。
smart_servo.turn_to(angle, speed, index = 1 )
智能舵机转动到指定角度,该积木块会阻塞线程直至动作完成或被其他指令打断,参数:
- angle 数值,表示舵机最终转到的角度,数值为正时,舵机顺时针转动,当该数值为负时,舵机逆时针转动。
smart_servo.run(power, index = 1)
设定智能舵机转动的速度,参数 :
- power 数值,有效范围为0 - 100
smart_servo.stop(index = "all")
智能舵机停止运动,参数:
- index 字符串或数值,默认为"all",此时指令指向链上所有智能舵机。
smart_servo.get_angle(index = 1)
获得智能舵机当前所在的角度。 返回数值,表示智能舵机自初始位置转过的角度。
smart_servo.get_speed(index = 1)
获得智能舵机当前的转动速度,无论是智能舵机自己的转速,抑或是智能舵机在外力作用下被转动的度数。 返回数值,代表转动的速度,单位为°/s。
smart_servo.release_angle(index = "all")
释放智能舵机,此时智能舵机将不会被锁定在当前的角度,因此可以在外力下被转动。智能舵机将保持释放角度状态直到接收到smart_servo.turn(angle),smart_servo.turn_to(angle), smart_servo.drive(power, t = "forever"),smart_servo.lock_angle()中任意一条指令的执行
smart_servo.lock_angle(index = "all")
锁定智能舵机度数,此时智能舵机的角度将不可在外力作用下被改变。
smart_servo.reset(index = "all")
重置智能舵机,重置后智能舵机将以当前位置为舵机零点。由于智能舵机的可重置次数有限,故该指令会阻塞线程3秒以防止该指令被重复执行。