
双路颜色传感器
双路颜色传感器使用两对光敏元件感知表面的颜色,在感知物体颜色的同时,还可以协助机器人进行巡线。
该模块提供从表示光强的模拟量、线和背景判断的数字量及运算之后的电机控制参数的多层次数据输出,保证使用的简便的同时,又提供了足够的灵活性。方便教师从不同层次讲解巡线和颜色的相关知识、原理。
该模块提供自适应地图学习功能。通过学习不同的背景和线的颜色,自动设置判断阈值。模块固件内置了巡线算法, 能够输出可以直接用来调整电机转速的参数,降低了实现高速巡线功能的难度。
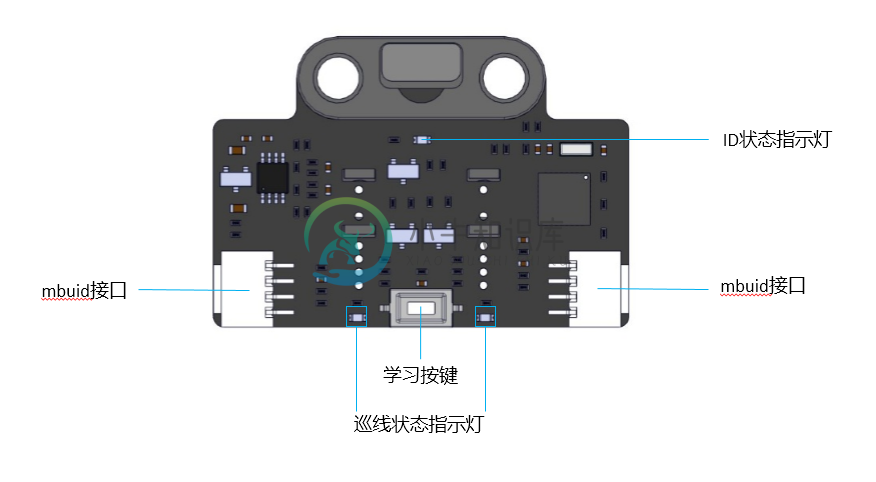
按键功能说明:
- 单击:暂无功能定义;
- 双击:触发巡线学习,学习步骤为将传感器两探头都置于巡线地图背景上,双击按键,观察到两个巡线状态LED灯快速闪烁时在背景和线上水平定高晃动传感器直到LED灯停止快闪(时间约2.5S)。学习参数会自动存储,若学习失败则两个巡线状态灯会转为慢闪,需要重新学习。
- 长按:切换巡线补光灯颜色,长按按键2~3S,巡线补光灯按照红绿蓝的循环顺序切换巡线补光灯灯颜色(正常巡线补光灯颜色不需要切换,学习成功后自动设定)
原理介绍
每一对颜色传感器可以看做是由一个光线传感器+RGB灯组成的。
在现实世界中,当我们看到一个东西是红色时,往往意味着该物体对红光的吸收较弱,而对其他光的吸收较强,因此当我们让补光灯以红灯照射一个物体时,越红的物体对红色光的发射越强烈,光线传感器的读值也就越高,我们由此得到了被检测物体的“红色程度”,以此类推,我们可以切换补光灯的颜色,让其在红、绿、蓝之间不断变化,记录光线传感器在对应时刻的读值,从而推算出被检测物体的“红色程度”,“绿色程度”和“蓝色程度”,进而推测被检测物体的颜色。
环境干扰和检测误差
在物体世界中,环境干扰和检测误差几乎是无处不在。如颜色传感器需要依赖检测补光灯在被检测物体上的反射光强度来“猜测”被检测物体的颜色,但此时环境光也会同时被光线传感器检测到,这会带来一定的误差。
检测误差也是一个需要被考虑的项,同一个物体即使在完全一致的环境中,两个 双路颜色传感器 对被检测物体的颜色也可能有不一样的看法(一般来说,它们的分歧不会很大)。
在实际操作中,工程师们会借助算法或是其他方面的设计来规避环境干扰和检测误差。比如,我们可以通过3D打印件来包裹住被检测物体和双路颜色传感器,来避免环境光的干扰,或是利用算法——在补光关闭时记录一个环境光强度,再开启补光灯,将两个时刻的光线传感器读值差认作是被检测物体反射补光灯灯光的强度,只要两个时刻足够接近,我们将可以认为环境光在两个时刻几乎是不变的。
对于检测误差,我们也可以使用算法,将多个相近的读值“归类”为一种颜色。
生活实例
- 使用颜色传感器设计可以分拣零件的流水线

参数
- 工作范围:距离检测物体 5~15mm
- 工作电流:70mA