
RT-Thread搭配ROS实现目标检测小车
引言
这应当是 RT-Thread 搭配 ROS 做摄像头小车的最后一篇文档了,这篇文档会把之前的内容汇聚起来,实现一个能目标检测的小车。
这篇文档几乎涉及了之前所有文档的内容,所以建议在看这篇文档之前先熟悉一下之前提到的内容。如果对之前的内容比较熟悉了,就会发现这篇文档很简短,但是却是建立在之前已有的基础上。
现在应当已经熟悉的内容:
- 了解 CNN 的工作原理;
- 能使用 Darknet 训练自己的目标检测模型
- 能用 rosserial 建立 RT-Thread 和 ROS 的连接
- 能用 ROS 发布图像信息
下面就会介绍如何用 ROS 发布的图像信息和 Darknet 连接做目标检测。
1.Darknet ROS
1.1 获取源码
其实下面要用到的是一个 ROS 软件包,这个软件包现在也是开源的:
# 初始化工作环境
$ mkdir catkin_workspace
$ cd catkin_workspace/src
$ catkin_init_workspace
## 下载源码
$ git clone --recursive http://github.com/leggedrobotics/darknet_ros.git除了源码,我们还要下载一些训练好的神经网络权值,放在下面这个目录:
$ catkin_workspace/src/darknet_ros/darknet_ros/yolo_network_config/weights/如果觉得国外下载速度太慢的话,这里我有个国内的 CDN 加速镜像:
- yolov2-tiny.weights:https://wuhanshare-1252843818.cos.ap-guangzhou.myqcloud.com/yolov2-tiny.weights
- yolov2.weights:https://wuhanshare-1252843818.cos.ap-guangzhou.myqcloud.com/yolov2.weights
- yolov3.weights:https://wuhanshare-1252843818.cos.ap-guangzhou.myqcloud.com/yolov3.weights
如果源码和权值都下载好了,我们就可以准备编译了。
1.2 编译源码
为了保证 Darknet 能够获取到摄像头的数据,我们需要先告诉它摄像头的信息发布在哪里,修改这个文件:
$ catkin_workspace/src/darknet_ros/darknet_ros/config/ros.yaml把下面的 topic 修改为自己图像发布的位置,例如我这里发布在 /usb_cam/image_raw
camera_reading:
topic: /usb_cam/image_raw
queue_size: 1然后就可以编译软件包了,在 catkin_workspace 目录下:
$ catkin_make一切正常的话,编译就完成了,其实不需要做太多的工作,编译完记得更新一下环境变量,这样后面才能正常启动这个软件包。
$ sorce devel/setup.bash1.3 目标检测
在进行目标检测前,我们先启动 ROS 节点:
$ roscore然后启动一个摄像头节点:
roslaunch usb_cam usb_cam-test.launch这样就可以实时看到摄像头的数据了,摄像头在哪里其实不重要,既可以在小车上,也可以在电脑上,这也是 ROS 的优美之处,只要节点发布了摄像头消息,不管摄像头在哪, ROS 都能拿到处理:

接下来我们启动 Darknet 的节点:
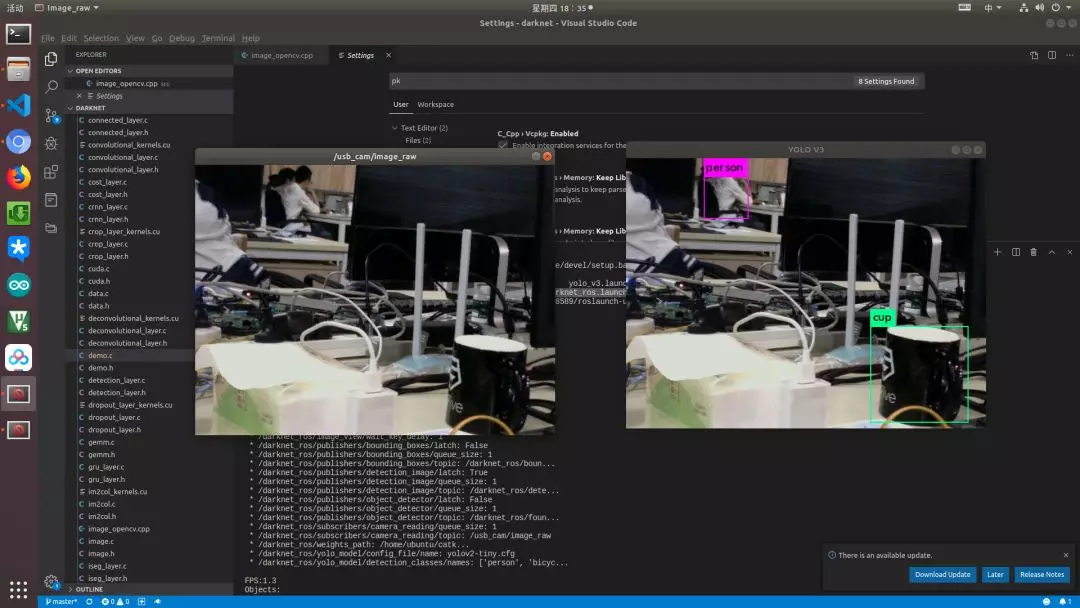
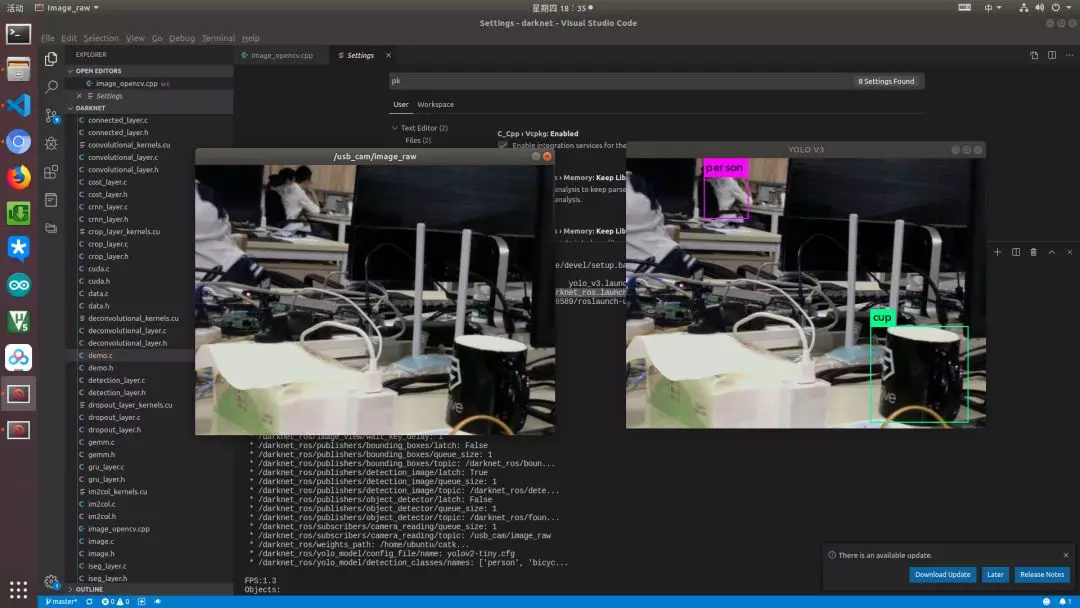
$ roslaunch darknet_ros darknet_ros.launch下面这张图就可以看到有两个视频流,左边的是没有处理的实时图像,右边是运行了目标检测的结果:
2.总结
RT-Thread 作为实时操作系统负责控制,Linux 则负责提供丰富的软件包运行算法,两者相结合,互相取长补短还是配合地挺好的。
3.参考文献
Darknet ROS:https://github.com/leggedrobotics/darknet_ros