
在RT-Thread潘多拉开发板上实现电源管理
摘要
本文介绍了基于 RT-Thread潘多拉开发板电源管理组件的使用和移植过程。
简介
随着物联网(IoT)的兴起,产品对功耗的需求越来越强烈。作为数据采集的传感器节点通常需要在电池供电时长期工作,而作为联网的SOC也需要有快速的响应功能和较低的功耗。
在产品开发的起始阶段,首先考虑是尽快完成产品的功能开发。在产品功能逐步完善之后,就需要加入电源管理功能。为了适应IoT的这种需求,RT-Thread提供了电源管理框架。电源管理框架的理念是尽量透明,使得产品加入低功耗功能更加轻松。
本文的示例都是在潘多拉开发板下运行。潘多拉开发板是 RT-Thread 和正点原子联合推出的硬件平台,该平台上专门为 IoT 领域设计,并提供了丰富的例程和文档。
MCU通常提供了多种时钟源供用户选择。例如潘多拉开发板上板载的 STM32L475 就可以选择 LSI/MSI/HSI 等内部时钟,还可以选择 HSE/LSE 等外部时钟。MCU 内通常也集成了 PLL(Phase-locked loops),基于不同的时钟源,向 MCU 的其他模块提供更高频率的时钟。
为了支持低功耗功能,MCU 里也会提供不同的休眠模式。例如 STM32L475 里,可以分成 SLEEP模式、STOP模式、STANDBY模式。这些模式还可以有进一步的细分,以适应不同的场合。
本节主要展示了如何开启 PM 组件和相应的驱动,并通过例程来演示常见场景下,应用应该如何管理模式。
最后,本节将介绍 RT-Thread PM 组件在 STM32L476 上的移植和注意事项。
配置工程
在潘多拉开发板上运行电源管理组件,需要下载潘多拉开发板的相关资料、RT-Thread 源码和 ENV 工具。
开启 Env 工具,进入潘多拉开发板的 BSP 目录(rt-thread\bsp\stm32\stm32l475-atk-pandora),在 Env 命令行里输入 menuconfig 进入配置界面配置工程。
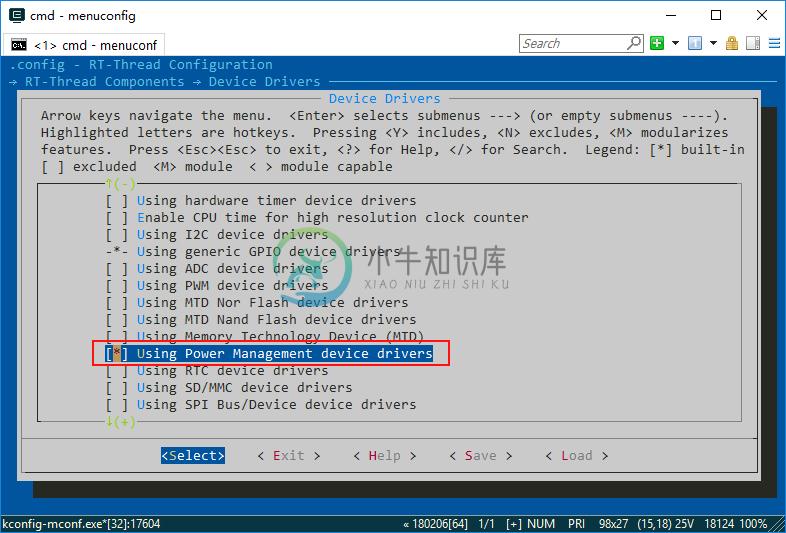
- 配置 PM 组件:勾选 BSP 里面的
RT-Thread Components ---> Device Drivers ---> [*] Using Power Management device drivers:
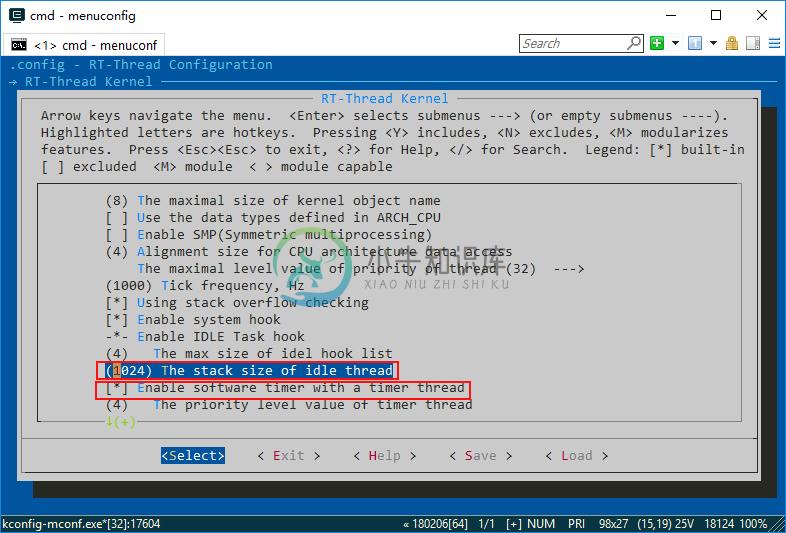
- 配置内核选项:使用 PM 组件需要更大的 IDLE 线程的栈,这里使用了1024 字节。例程里还使用 Software timer,所以我们还需要开启相应的配置
- 配置完成,保存并退出配置选项,输入命令
scons --target=mdk5生成 mdk5 工程;
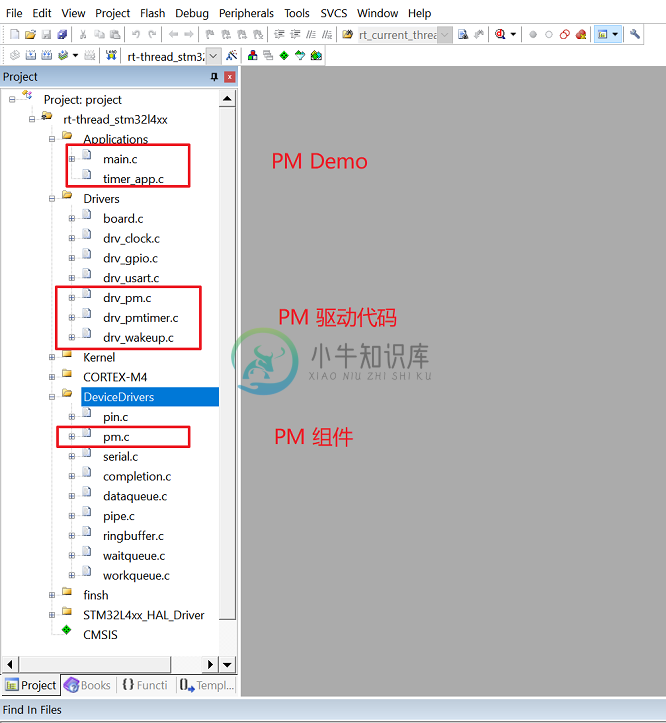
打开mdk5 工程可以看到相应的源码以及被添加进来:
使用
定时应用
在定时应用里,我们创建了一个周期性的软件定时器,定时器任务里周期性输出当前的 OS Tick。如果创建软件定时器成功之后,使用rt_pm_request(PM_SLEEP_MODE_DEEP)请求深度睡眠模式。以下是示例核心代码(该代码可以直接复制 main.c 里运行):
#include <board.h>
#include <rtthread.h>
#include <rtdevice.h>
#ifndef RT_USING_TIMER_SOFT
#error "Please enable soft timer feature!"
#endif
#define TIMER_APP_DEFAULT_TICK (RT_TICK_PER_SECOND * 2)
#ifdef RT_USING_PM
static rt_timer_t timer1;
static void _timeout_entry(void *parameter)
{
rt_kprintf("current tick: %ld\n", rt_tick_get());
}
static int timer_app_init(void)
{
rt_pm_request(PM_SLEEP_MODE_IDLE);
rt_pm_request(PM_SLEEP_MODE_LIGHT);
timer1 = rt_timer_create("timer_app",
_timeout_entry,
RT_NULL,
TIMER_APP_DEFAULT_TICK,
RT_TIMER_FLAG_PERIODIC | RT_TIMER_FLAG_SOFT_TIMER);
if (timer1 != RT_NULL)
{
rt_timer_start(timer1);
/* keep in timer mode */
rt_pm_request(PM_SLEEP_MODE_DEEP);
return 0;
}
else
{
return -1;
}
}
INIT_APP_EXPORT(timer_app_init);
#endif /* RT_USING_PM */按下复位按键重启开发板,打开终端软件,我们可以看到有定时输出日志:
\ | /
- RT - Thread Operating System
/ | \ 4.0.1 build May 9 2019
2006 - 2019 Copyright by rt-thread team
msh >current tick: 2001
current tick: 4002
current tick: 6003
current tick: 8004我们可以在msh里输入pm_dump命令观察PM组件的模式状态:
pm_dump
| Power Management Mode | Counter | Timer |
+-----------------------+---------+-------+
| None Mode | 0 | 0 |
| Idle Mode | 1 | 0 |
| LightSleep Mode | 1 | 0 |
| DeepSleep Mode | 1 | 1 |
| Standby Mode | 0 | 0 |
| Shutdown Mode | 0 | 0 |
+-----------------------+---------+-------+
pm current sleep mode: Idle Mode
pm current run mode: Normal Speed
msh >以上的输出说明,PM 组件里 Idle、Light Sleep、Deep Sleep 都被请求了一次,现在正处于空闲模式(Idle Mode)。
我们依次输入命令pm_release 1和pm_release 2 手动释放 Idle 和 Light Sleep 模式后,将进入Deep Sleep Mode。进入Deep Sleep Mode之后会定时唤醒,shell 还是一直在输出:
msh />pm_release 1
msh />
msh />current tick: 8023
current tick: 10024
current tick: 12025
msh />pm_release 2
msh />
msh />current tick: 14026
current tick: 16027
current tick: 18028
current tick: 20029
current tick: 22030
current tick: 24031我们可以通过功耗仪器观察功耗的变化。下图是基于 Monsoon Solutions Inc 的 Power Monitor 的运行截图,可以看到随着模式变化,功耗明显变化:
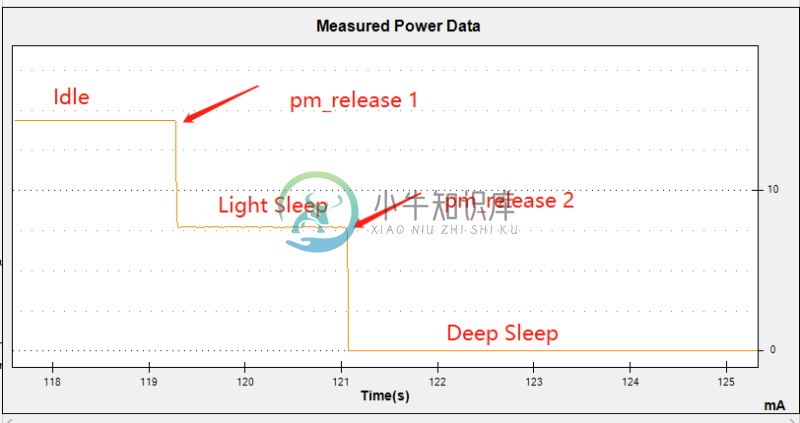
休眠时显示2mA是仪器的误差。
按键唤醒应用
在按键唤醒应用里,我们使用 wakeup 按键来唤醒处于休眠模式的 MCU。一般情况下,在 MCU 处于比较深度的休眠模式,只能通过特定的方式唤醒。MCU 被唤醒之后,会触发相应的中断。以下例程是从 Deep Sleep 模式唤醒 MCU 并闪烁 LED 之后,再次进入休眠的例程。以下是核心代码(该代码可以直接复制 main.c 里运行):
#include <board.h>
#include <rtthread.h>
#include <rtdevice.h>
#ifdef RT_USING_PM
#define WAKEUP_EVENT_BUTTON (1 << 0)
#define PIN_LED_R GET_PIN(E, 7)
#define WAKEUP_PIN GET_PIN(C, 13)
#define WAKEUP_APP_THREAD_STACK_SIZE 1024
static rt_event_t wakeup_event;
static void wakeup_callback(void *args)
{
rt_event_send(wakeup_event, WAKEUP_EVENT_BUTTON);
}
static void wakeup_init(void)
{
rt_pin_mode(WAKEUP_PIN, PIN_MODE_INPUT_PULLUP);
rt_pin_attach_irq(WAKEUP_PIN, PIN_IRQ_MODE_FALLING, wakeup_callback, RT_NULL);
rt_pin_irq_enable(WAKEUP_PIN, 1);
}
static void wakeup_app_entry(void *parameter)
{
wakeup_init();
rt_pm_request(PM_SLEEP_MODE_DEEP);
while (1)
{
if (rt_event_recv(wakeup_event,
WAKEUP_EVENT_BUTTON,
RT_EVENT_FLAG_AND | RT_EVENT_FLAG_CLEAR,
RT_WAITING_FOREVER, RT_NULL) == RT_EOK)
{
rt_pm_request(PM_SLEEP_MODE_NONE);
rt_pin_mode(PIN_LED_R, PIN_MODE_OUTPUT);
rt_pin_write(PIN_LED_R, 0);
rt_thread_delay(rt_tick_from_millisecond(500));
rt_pin_write(PIN_LED_R, 1);
rt_pm_release(PM_SLEEP_MODE_NONE);
}
}
}
static int wakeup_app(void)
{
rt_thread_t tid;
wakeup_event = rt_event_create("wakup", RT_IPC_FLAG_FIFO);
RT_ASSERT(wakeup_event != RT_NULL);
tid = rt_thread_create("wakeup_app", wakeup_app_entry, RT_NULL,
WAKEUP_APP_THREAD_STACK_SIZE, RT_MAIN_THREAD_PRIORITY, 20);
RT_ASSERT(tid != RT_NULL);
rt_thread_startup(tid);
return 0;
}
INIT_APP_EXPORT(wakeup_app);
#endif上面的代码里,我们创建一个线程,这个线程里注册了按键中断唤醒回调函数,接着请求深度睡眠模式,每当唤醒中断之后就会触发回调。回调函数里会发送事件WAKEUP_EVENT_BUTTON。这样我们的线程里接收到这个事件之后,首先请求在 None 模式,然后完成 LED 闪烁功能之后,再去释放 None 。
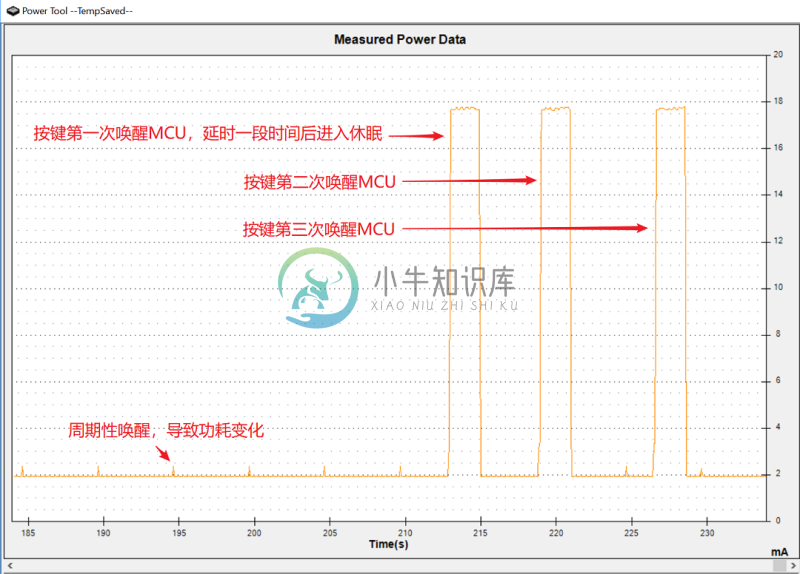
上图是我们三次按下 wakeup 按键的运行截图。每次按下按键,MCU 都会被唤醒点亮 LED 2秒之后,再次进入休眠。
STM32L4 移植 PM
STM32L4 的低功耗模式简介
STM32L476 是 ST 公司推出的一款超低功耗的 Crotex-M4 内核的 MCU,支持多个电源管理模式,其中最低功耗 Shutdown 模式下,待机电流仅 30 nA。ST 公司 把 L476 的电管管理分为很多种,但各个模式的并非功耗逐级递减的特点,下面是各个模式之间的状态转换图:
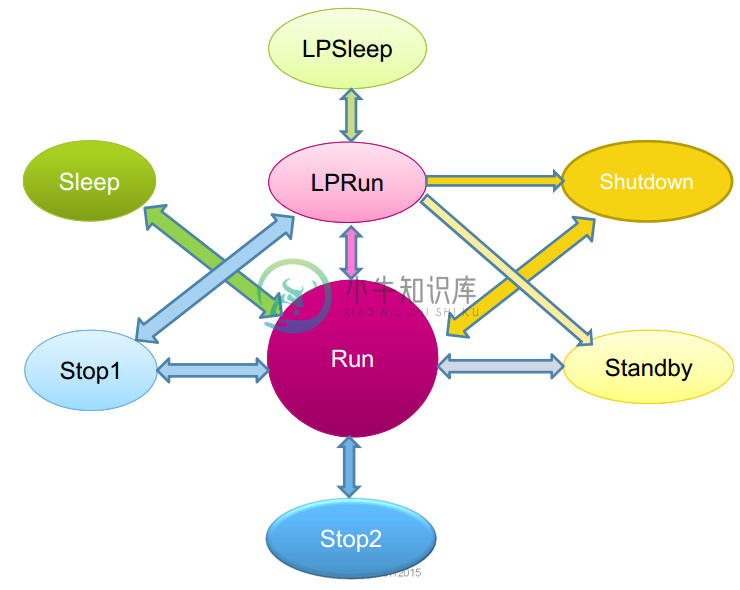
尽管 STM32L476 的低功耗模式很多,但本质上并不复杂,理解它的原理有助于我们移植驱动,同时更好的在产品中选择合适的模式。
最终决定 STM32L476 系统功耗的主要是三个因素:稳压器(voltage regulator)、CPU 工作频率、芯片自身低功耗的处理,下面分别对三个因素进行阐述。
- 稳压器
L4 使用两个嵌入式线性稳压器为所有数字电路、待机电路以及备份时钟域供电,分别是主稳压器(main regulator,下文简称 MR)和低功耗稳压器(low-power regulator,下文简称 LPR)。稳压器在复位后处于使能状态,根据应用模式,选择不同的稳压器对 Vcore 域供电。其中,MR 的输出电压可以由软件配置为不同的范围(Range 1 和 Rnage 2)。
| 稳压器 | 应用场合 |
|---|---|
| MR(Range 1) | Vcore = 1.2V,用于运行模式、睡眠模式和停止模式0,MR 未 Vcore 域提供全功率 |
| MR(Range 2) | Vcore = 1.0V,使用的场景同上 |
| LPR | 用于低功耗运行模式、低功耗休眠模式、停止模式 1、停止模式2 |
| OFF | Standby 和 Shutdown 模式下,MR 和 LPR 都被关闭 |
- CPU 工作频率
通过降低 CPU 的主频达到降低功耗的目的:
MR 工作在 Range 1 正常模式时,SYSCLK 最高可以工作在 80M;
MR 工作在 Range 2 时,SYSCLK 最高不能超过 26 M;
低功耗运行模式和低功耗休眠模式,即 Vcore 域由 LPR 供电,SYSCLK 必须小于 2M。
- 芯片本身的低功耗处理
芯片本身定义了一系列的休眠模式,如 Sleeep、Stop、Standby 和 Shutdown,前面的四种模式功耗逐渐降低,实质是芯片内部通过关闭外设和时钟来实现。
移植的具体实现
上文简要说明 STM32 的低功耗模式和工作原理,下面介绍 RT-Thread PM 的功能和移植接口。
RT-Thread 低功耗管理系统从设计上分离运行模式和休眠模式,独立管理,运行模式用于变频和变电压,休眠调用芯片的休眠特性。对于多数芯片和开发来说,可能并不需要考虑变频和变电压,仅需关注休眠模式。
STM32 L4 系列的芯片有运行模式和低功耗运行模式的概念,同时 MR 还有 Range 2 模式,可用于变频场景。
PM 组件的底层功能都是通过struct rt_pm_ops结构体里的函数完成:
/**
* low power mode operations
*/
struct rt_pm_ops
{
void (*sleep)(struct rt_pm *pm, uint8_t mode);
void (*run)(struct rt_pm *pm, uint8_t mode);
void (*timer_start)(struct rt_pm *pm, rt_uint32_t timeout);
void (*timer_stop)(struct rt_pm *pm);
rt_tick_t (*timer_get_tick)(struct rt_pm *pm);
};- 移植休眠模式
移植休眠模式仅需关注 sleep 接口,根据 PM 用户手册相关介绍,首先将 RT-Thread 的休眠模式和 STM32 的模式作一个转换:
| RT-Thread | STM32 | 描述 |
|---|---|---|
| PM_SLEEP_MODE_NONE | Run | 正常运行模式,不进行任何降功耗的措施 |
| PM_SLEEP_MODE_IDLE | Run | 正常运行模式,可选择 WFI(等待中断唤醒)和WFE(等待事件唤醒),此处暂不处理 |
| PM_SLEEP_MODE_LIGHT | Sleep | 轻度睡眠模式,执行 ST 的 Sleep 模式 |
| PM_SLEEP_MODE_DEEP | Stop2 | 深度睡眠模式,执行 ST 的 Stop2 模式 |
| PM_SLEEP_MODE_STANDBY | Standby | 待机模式,执行 ST 的 Standby 模式 |
| PM_SLEEP_MODE_SHUTDOWN | Shutdown | 停止模式,执行 ST 的 Shtudown 模式 |
下面是具体的实现:
#include <board.h>
#include <rtthread.h>
#include <rtdevice.h>
static void sleep(struct rt_pm *pm, uint8_t mode)
{
switch (mode)
{
case PM_SLEEP_MODE_NONE:
break;
case PM_SLEEP_MODE_IDLE:
// __WFI();
break;
case PM_SLEEP_MODE_LIGHT:
/* Enter SLEEP Mode, Main regulator is ON */
HAL_PWR_EnterSLEEPMode(PWR_MAINREGULATOR_ON, PWR_SLEEPENTRY_WFI);
break;
case PM_SLEEP_MODE_DEEP:
/* Enter STOP 2 mode */
HAL_PWREx_EnterSTOP2Mode(PWR_STOPENTRY_WFI);
break;
case PM_SLEEP_MODE_STANDBY:
/* Enter STANDBY mode */
HAL_PWR_EnterSTANDBYMode();
break;
case PM_SLEEP_MODE_SHUTDOWN:
/* Enter SHUTDOWNN mode */
HAL_PWREx_EnterSHUTDOWNMode();
break;
default:
RT_ASSERT(0);
break;
}
}
int rt_hw_pm_init(void)
{
static const struct rt_pm_ops _ops =
{
sleep,
RT_NULL,
RT_NULL,
RT_NULL,
RT_NULL
};
rt_uint8_t timer_mask = 0;
/* Enable Power Clock */
__HAL_RCC_PWR_CLK_ENABLE();
/* initialize system pm module */
rt_system_pm_init(&_ops, timer_mask, RT_NULL);
return 0;
}
INIT_BOARD_EXPORT(rt_hw_pm_init);目前为止,ST 的休眠模式已经初步加入了,能够满足部分的应用场景。打开命令行,输入请求/释放休眠模式命令,可以观察到功耗显著降低。
- 移植时间补偿接口
某些情况下,我们可能需要系统在空闲时进入 Stop 模式,以达到更低的将功耗效果。L476 Stop 2 模式下的电流可以达到 1.6 uA 左右,ST 手册上对 Stop2 模式的描述如下:
Stop 2 模式基于 Cortex-M4 深度睡眠模式与外设时钟门控。在 Stop 2 模式下, Vcore 域中的所有时钟都会停止, PLL、 MSI、 HSI16 和 HSE 振荡器也被禁止。一些带有唤醒功能(I2C3 和 LPUART)的外设可以开启 HSI16 以获取帧,如果该帧不是唤醒帧,也可以在接收到帧后关闭 HSI16。SRAM1、 SRAM2、 SRAM3 和寄存器内容将保留,所有 I/O 引脚的状态与运行模式下相同。
根据手册可知,Stop 2 模式会关闭系统时钟,当前的 OS Tick 基于内核的 Systick 定时器。那么在系统时钟停止后,OS Tick 也会停止,对于某些依赖 OS Tick 的应用,在进入 Stop 2 模式,又被中断唤醒后,就会出现问题,因此需要在系统唤醒后,对 OS Tick 进行补偿。Stop 2 模式下,绝大多数外设都停止工作,仅低功耗定时器 1(LP_TIM1)选择 LSI 作为时钟源后,仍然能正常运行,所以选择 LP_TIM1 作为 Stop 2 模式的时间补偿定时器。
休眠的时间补偿需要实现三个接口,分别用于启动低功耗定时器、停止定时器、唤醒后获取休眠的 Tick,下面是具体的实现:
static void pm_timer_start(struct rt_pm *pm, rt_uint32_t timeout)
{
RT_ASSERT(pm != RT_NULL);
RT_ASSERT(timeout > 0);
/**
* 当超时为 RT_TICK_MAX 时,表明系统此时没有依赖 OS Tick 的应用,
* 因此不启动低功耗定时器,避免超时唤醒而增加系统功耗
*/
if (timeout != RT_TICK_MAX)
{
/* Convert OS Tick to pmtimer timeout value */
timeout = stm32l4_pm_tick_from_os_tick(timeout);
if (timeout > stm32l4_lptim_get_tick_max())
{
timeout = stm32l4_lptim_get_tick_max();
}
/* Enter PM_TIMER_MODE */
stm32l4_lptim_start(timeout);
}
}
static void pm_timer_stop(struct rt_pm *pm)
{
RT_ASSERT(pm != RT_NULL);
/* Reset pmtimer status */
stm32l4_lptim_stop();
}
static rt_tick_t pm_timer_get_tick(struct rt_pm *pm)
{
rt_uint32_t timer_tick;
RT_ASSERT(pm != RT_NULL);
timer_tick = stm32l4_lptim_get_current_tick();
return stm32l4_os_tick_from_pm_tick(timer_tick);
}
int rt_hw_pm_init(void)
{
static const struct rt_pm_ops _ops =
{
sleep,
RT_NULL,
pm_timer_start,
pm_timer_stop,
pm_timer_get_tick
};
rt_uint8_t timer_mask = 0;
/* Enable Power Clock */
__HAL_RCC_PWR_CLK_ENABLE();
/* initialize timer mask */
timer_mask = 1UL << PM_SLEEP_MODE_DEEP;
/* initialize system pm module */
rt_system_pm_init(&_ops, timer_mask, RT_NULL);
return 0;
}休眠时间补偿的移植相对并不复杂,根据 Tick 配置低功耗定时器超时,唤醒后获取实际休眠时间并转换为OS Tick,告知 PM 组件即可。另外,从 Stop 2 模式唤醒后,默认会切换到内部的 MSI 时钟,通常需要重新配置时钟树。
- 移植运行模式
STM32L476 的运行模式移植主要是通过改变CPU 频率 和 稳压器,让其工作在 MR Range 2 或者 LP_RUN 模式,两个模式切换都会触发 CPU 频率改变的操作,这是一个比较危险的操作,我们在此处不作介绍。但是RT-Thread 仓库的 stm32l476-nucleo 有完整的实现,且已通过测试,如果项目中有此需求,可以参考该 bsp。