
Nano 移植原理
本片文档介绍 Nano 移植原理,针对的是不同 MCU 的移植,如 Cortex M,RISC-V,或者是其他 MCU 的移植。移植过程主要分为两个部分:libcpu 移植与板级移植,在讲解移植之前,本文档对 RT-Thread Nano 的启动流程与移植目录结构先进行说明。
启动流程
RT-Thread 启动流程如下所示,在图中标出颜色的部分需要用户特别注意(黄色表示 libcpu 移植相关的内容,绿色部分表示板级移植相关的内容)。
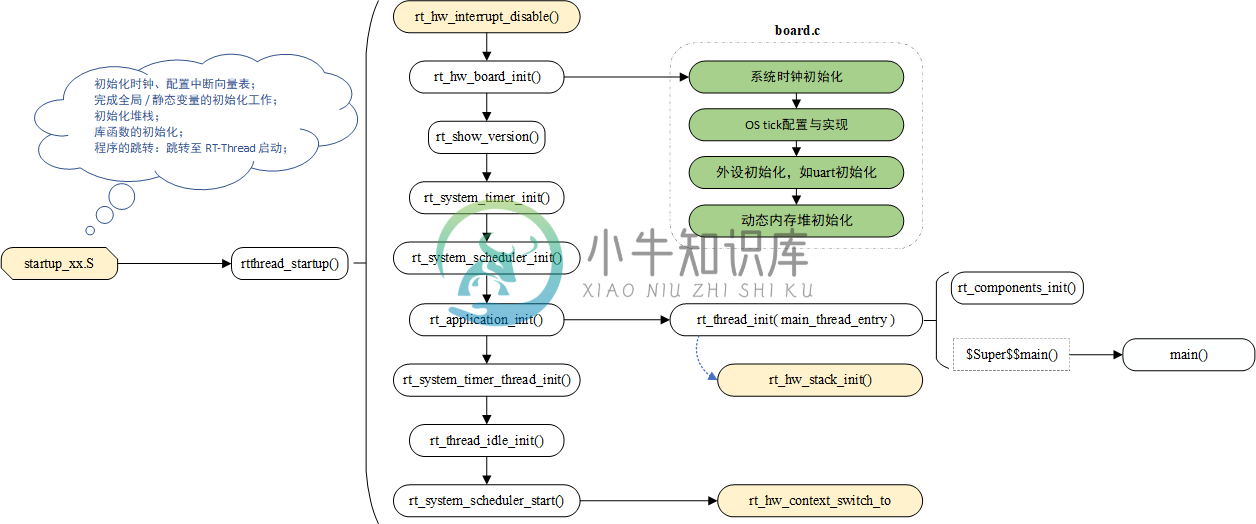
RT-Thread 启动代码统一入口为 rtthread_startup() ,芯片启动文件在完成必要工作(如初始化时钟、配置中断向量表、初始化堆栈等)后,最终会在程序跳转时,跳转至 RT-Thread 的启动入口中。RT-Thread 的启动流程如下:
- 全局关中断,初始化与系统相关的硬件。
- 打印系统版本信息,初始化系统内核对象(如定时器、调度器)。
- 初始化用户 main 线程(同时会初始化线程栈),在 main 线程中对各类模块依次进行初始化。
- 初始化软件定时器线程、初始化空闲线程。
- 启动调度器,系统切换到第一个线程开始运行(如 main 线程),并打开全局中断。
移植目录结构
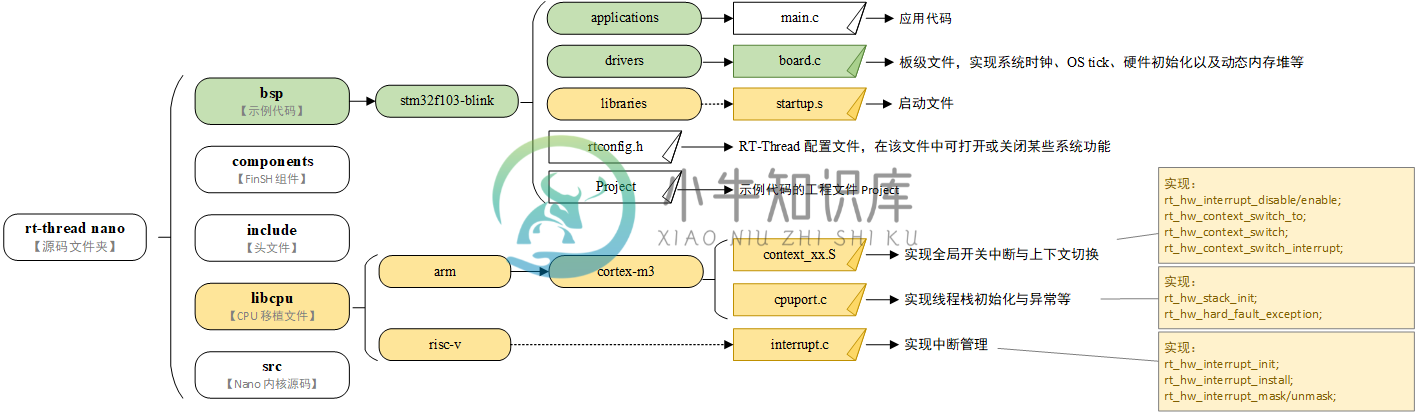
在 rtthread-nano 源码中,与移植相关的文件位于下图中有颜色标记的路径下(黄色表示 libcpu 移植相关的文件,绿色部分表示板级移植相关的文件):
libcpu 移植
RT-Thread 的 libcpu 抽象层向下提供了一套统一的 CPU 架构移植接口,这部分接口包含了全局中断开关函数、线程上下文切换函数、时钟节拍的配置和中断函数、Cache 等等内容,RT-Thread 支持的 cpu 架构在源码的 libcpu 文件夹下。
启动文件 startup.s
启动文件由芯片厂商提供,位于芯片固件库中。每款芯片都有相对应的启动文件,在不同开发环境下启动文件也不相同。当系统加入 RT-Thread 之后,会将 RT-Thread 的启动放在调用 main() 函数之前,如下图所示:

startup.s:主要完成初始化时钟、配置中断向量表;完成全局 / 静态变量的初始化工作;初始化堆栈;库函数的初始化;程序的跳转等内容。
程序跳转:芯片在 KEIL MDK 与 IAR 下的启动文件不用做修改,会自动转到 RT-Thread 系统启动函数 rtthread_startup() 。GCC 下的启动文件需要修改,让其跳转到 RT-Thread 提供的 entry() 函数,其中 entry() 函数调用了 RT-Thread 系统启动函数 rtthread_startup()。
举例: stm32 在 GCC 开发环境下的启动文件,修改 GCC 启动文件,使其跳转到 entry 函数。以下是启动文件的代码片段:
//修改前:
bl SystemInit
bl main
//修改后:
bl SystemInit
bl entry /* 修改此处,由 main 改为 entry */RT-Thread 在 entry 函数中实现了 GCC 环境下的 RT-Thread 启动:
int entry(void)
{
rtthread_startup();
return 0;
}最终调用 main() 函数进入用户 main()。
上下文切换 context_xx.s
上下文切换表示 CPU 从一个线程切换到另一个线程、或者线程与中断之间的切换等。在上下文切换过程中,CPU 一般会停止处理当前运行的代码,并保存当前程序运行的具体位置以便之后继续运行。
在该文件中除了实现上下文切换的函数外,还需完成全局开关中断函数,详见编程指南 《内核移植》 - CPU 架构移植 章节中的 “实现全局开关中断 ” 小节与 “实现上下文切换” 小节。
| 需实现的函数 | 描述 |
|---|---|
| rt_base_t rt_hw_interrupt_disable(void); | 关闭全局中断 |
| void rt_hw_interrupt_enable(rt_base_t level); | 打开全局中断 |
| void rt_hw_context_switch_to(rt_uint32 to); | 没有来源线程的上下文切换,在调度器启动第一个线程的时候调用,以及在 signal 里面会调用 |
| void rt_hw_context_switch(rt_uint32 from, rt_uint32 to); | 从 from 线程切换到 to 线程,用于线程和线程之间的切换 |
| void rt_hw_context_switch_interrupt(rt_uint32 from, rt_uint32 to); | 从 from 线程切换到 to 线程,用于中断里面进行切换的时候使用 |
注意:在 Cortex-M 中,PendSV 中断处理函数是 PendSV_Handler(),线程切换的实际工作在 PendSV_Handler() 里完成。
线程栈初始化 cpuport.c
在 RT-Thread 中,线程具有独立的栈,当进行线程切换时,会将当前线程的上下文存在栈中,当线程要恢复运行时,再从栈中读取上下文信息,进行恢复。
故障异常处理函数 rt_hw_hard_fault_exception(),在发生硬件错误时,执行 HardFault_Handler 中断,会执行该函数。
该文件中主要实现线程栈的初始化 rt_hw_stack_init() 与 hard fault 异常处理函数,线程栈初始化函数的参数以及实现的步骤详见编程指南 《内核移植》 - CPU 架构移植 章节中的 ”实现线程栈初始化“ 小节。
| 需实现的函数 | 描述 |
|---|---|
| rt_hw_stack_init() | 实现线程栈的初始化 |
| rt_hw_hard_fault_exception() | 异常函数:系统硬件错误 |
中断与异常挂接 interrupt.c
注意事项
注意:在 Cortex-M 内核上,所有中断都采用中断向量表的方式进行处理,即当一个中断触发时,处理器将直接判定是哪个中断源,然后直接跳转到相应的固定位置进行处理,不需要再自行实现中断管理。
在一些非 Cortex-M 架构中,系统没有实现类似中断向量表的功能,物理中断要和用户的中断服务例程相关联,就需要使用中断管理接口对中断进行管理,这样当发生中断时就可以触发相应的中断,执行中断服务例程。
详见编程指南 《中断管理》 章节。
| 需实现的中断管理接口 | 描述 |
|---|---|
| rt_hw_interrupt_init() | 硬件中断初始化 |
| rt_hw_interrupt_install() | 中断服务程序挂接 |
| rt_hw_interrupt_mask() | 屏蔽指定的中断源 |
| rt_hw_interrupt_umask() | 打开被屏蔽的中断源 |
板级移植 board.c
注意事项
board.c、rtconfig.h 是与硬件 / 板级相关的文件,在移植时需自行实现。Cortex M 架构可参考 Nano 源码 bsp 文件夹中已有的的 board.c、rtconfig.h 。
板级移植主要是针对 rt_hw_board_init() 函数内容的实现,该函数在板级配置文件 board.c 中,函数中做了许多系统启动必要的工作,其中包含:
- 配置系统时钟。
- 实现 OS 节拍。
- 初始化外设:如 GPIO/UART 等等。
- 初始化系统内存堆,实现动态堆内存管理。
- 板级自动初始化,使用 INIT_BOARD_EXPORT() 自动初始化的函数会在此处被初始化。
- 其他必要的初始化,如 MMU 配置(需要时请自行在 rt_hw_board_init 函数中调用应用函数实现)。
/* board.c */
void rt_hw_board_init(void)
{
/* System Clock Update */
SystemCoreClockUpdate();
/* System Tick Configuration */
_SysTick_Config(SystemCoreClock / RT_TICK_PER_SECOND);
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
rt_system_heap_init(rt_heap_begin_get(), rt_heap_end_get());
#endif
/* Call components board initial (use INIT_BOARD_EXPORT()) */
#ifdef RT_USING_COMPONENTS_INIT
rt_components_board_init();
#endif
}配置系统时钟
系统时钟是给各个硬件模块提供工作时钟的基础,一般在 rt_hw_board_init() 函数中完成,可以调用库函数实现配置,也可以自行实现。
如下是 stm32 配置系统时钟调用示例(调用库函数 SystemCoreClockUpdate()):
/* board.c */
void rt_hw_board_init()
{
SystemCoreClockUpdate(); // 在无库函数使用时,一般使用 rt_hw_clock_init() 配置,函数名不做要求,函数自行实现
...
}实现 OS 节拍
OS 节拍也叫时钟节拍或 OS tick。任何操作系统都需要提供一个时钟节拍,以供系统处理所有和时间有关的事件。
时钟节拍的实现:通过硬件 timer 实现周期性中断,在定时器中断中调用 rt_tick_increase() 函数实现全局变量 rt_tick 自加,从而实现时钟节拍。一般地,在 Cortex M 上直接使用内部的滴答定时器 Systick 实现。
示例:如下是 stm32 配置 OS 节拍示例,在初始化时钟节拍后,直接在 SysTick_Handler() 中断服务例程中调用 rt_tick_increase()。
/* board.c */
void rt_hw_board_init()
{
...
_SysTick_Config(SystemCoreClock / RT_TICK_PER_SECOND); // 使用 SysTick 实现时钟节拍
...
}
/* 中断服务例程 */
void SysTick_Handler(void)
{
/* enter interrupt */
rt_interrupt_enter();
rt_tick_increase();
/* leave interrupt */
rt_interrupt_leave();
}对于使用了 RT-Thread 中断管理的 CPU 架构,中断服务例程需要通过 rt_hw_interrupt_install() 进行装载(关于中断及其装载,详见本文档的” 中断管理 “ 小节),如下示例:
/* board.c */
void rt_hw_board_init()
{
...
rt_hw_timer_init(); // 使用 硬件定时器 实现时钟节拍,一般命名为 rt_hw_timer_init()
...
}
int rt_hw_timer_init(void) // 函数自行实现,并需要装载中断服务例程
{
...
rt_hw_interrupt_install(IRQ_PBA8_TIMER2_3, rt_hw_timer_isr, RT_NULL, "tick");
rt_hw_interrupt_umask(IRQ_PBA8_TIMER2_3);
}
/* 中断服务例程 */
static void rt_hw_timer_isr(int vector, void *param)
{
rt_interrupt_enter();
rt_tick_increase();
rt_interrupt_leave();
}注意事项
在初始化时钟节拍的时候,会用到宏 RT_TICK_PER_SECOND。通过修改该宏的值,可以修改系统中一个时钟节拍的时间长度。
硬件外设初始化
硬件初始化,如 UART 初始化等(对接控制台),需要在 rt_hw_board_init() 函数中手动调用 UART 初始化函数。
/* board.c */
void rt_hw_board_init(void)
{
....
uart_init();
....
}实现动态内存堆
RT-Thread Nano 默认不开启动态内存堆功能,开启 RT_USING_HEAP 将可以使用动态内存功能,即可以使用 rt_malloc、rt_free 以及各种系统动态创建对象的 API。动态内存堆管理功能的初始化是通过 rt_system_heap_init() 函数完成的,动态内存堆的初始化需要指定堆内存的起始地址和结束地址,函数原型如下:
void rt_system_heap_init(void *begin_addr, void *end_addr)开启 RT_USING_HEAP 后,系统默认使用数组作为 heap,heap 的起始地址与结束地址作为参数传入 heap 初始化函数,heap 初始化函数 rt_system_heap_init() 将在 rt_hw_board_init() 中被调用。
开启 heap 后,系统中默认使用数组作为 heap(heap 默认较小,实际使用时请根据芯片 RAM 情况改大),获得的 heap 的起始地址与结束地址,作为参数传入 heap 初始化函数:
#define RT_HEAP_SIZE 1024
static uint32_t rt_heap[RT_HEAP_SIZE];
RT_WEAK void *rt_heap_begin_get(void)
{
return rt_heap;
}
RT_WEAK void *rt_heap_end_get(void)
{
return rt_heap + RT_HEAP_SIZE;
}
void rt_hw_board_init(void)
{
....
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
rt_system_heap_init(rt_heap_begin_get(), rt_heap_end_get()); //传入 heap 的起始地址与结束地址
#endif
....
}如果不想使用数组作为动态内存堆,则可以重新指定系统 HEAP 的大小,例如使用 RAM ZI 段结尾处作为 HEAP 的起始地址(这里需检查与链接脚本是否对应),使用 RAM 的结尾地址作为 HEAP 的结尾地址,这样可以将空余RAM 全部作为动态内存 heap 使用。如下示例重新定义了 HEAP 的起始地址与结尾地址,并作为初始化参数进行系统 HEAP 初始化。
#define STM32_SRAM1_START (0x20000000)
#define STM32_SRAM1_END (STM32_SRAM1_START + 20 * 1024) // 结束地址 = 0x20000000(基址) + 20K(RAM大小)
#if defined(__CC_ARM) || defined(__CLANG_ARM)
extern int Image$$RW_IRAM1$$ZI$$Limit; // RW_IRAM1,需与链接脚本中运行时域名相对应
#define HEAP_BEGIN ((void *)&Image$$RW_IRAM1$$ZI$$Limit)
#endif
#define HEAP_END STM32_SRAM1_ENDvoid rt_hw_board_init(void)
{
....
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
rt_system_heap_init((void *)HEAP_BEGIN, (void *)HEAP_END);
#endif
....
}链接脚本
链接脚本,也称分散加载文件,决定在生成 image 文件时如何来分配相关数据的存放基址,如果不指定特定的链接脚本,连接器就会自动采用默认的链接脚本来生成镜像。
举例 stm32 在 KEIL MDK 开发环境下的链接脚本文件 xxx.sct:
LR_IROM1 0x08000000 0x00020000 { ; load region size_region
ER_IROM1 0x08000000 0x00020000 { ; load address = execution address
*.o (RESET, +First)
*(InRoot$$Sections)
.ANY (+RO)
}
RW_IRAM1 0x20000000 0x00005000 { ; RW data
.ANY (+RW +ZI)
}
}其中 RW_IRAM1 0x20000000 0x00005000 表示定义一个运行时域 RW_IRAM1(默认域名),域基址为 0x20000000,域大小为 0x00005000(即 20K ),对应实际 RAM 大小。.ANY (+RW +ZI) 表示加载所有匹配目标文件的可读写数据 RW-Data、清零数据 ZI-Data。所以运行时所占内存的结尾处就是 ZI 段结尾处,可以将 ZI 结尾处之后的内存空间作为系统动态内存堆使用。