简介
本连载教程一辆能够用 ROS 控制的带摄像头的小车,用 ROS 发布图像数据,对获取到的图像进行处理,例如目标检测。
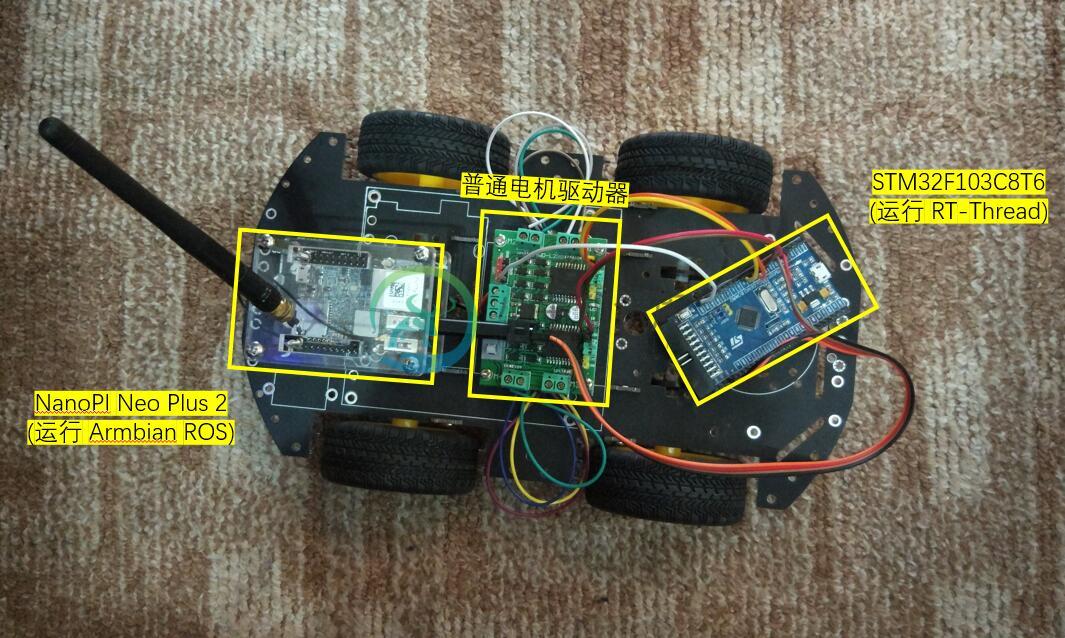
智能车系统框图如下:

实物图:
教程目录
1、RT-Thread 卷积神经网络(CNN) 手写体识别 (MNIST)
神经网络理论:神经网络图像相关理论
训练卷积神经网络模型:用 Keras 训练手写体识别模型
运行卷积神经网络模型:RT-Thread 解析并加载 onnx 模型(protobuf格式)
2、 Darknet 训练目标检测模型 :Darknet 训练一个小黄人检测模型
3、 RT-Thread 连接 ROS :RT-Thread 的 rosserial 软件包和 ROS 建立连接
4、 RT-Thread 连接 ROS 控制摄像头小车 :ROS 发布图像信息
5、 RT-Thread 连接 RPLidar A1 激光雷达 :使用 RT-Thread 的 RPLidar 软件包
6、RT-Thread 搭配 ROS 实现目标检测小车 :Darknet ROS 利用 ROS 小车发布的图像信息运行 Yolo 神经网络做目标检测
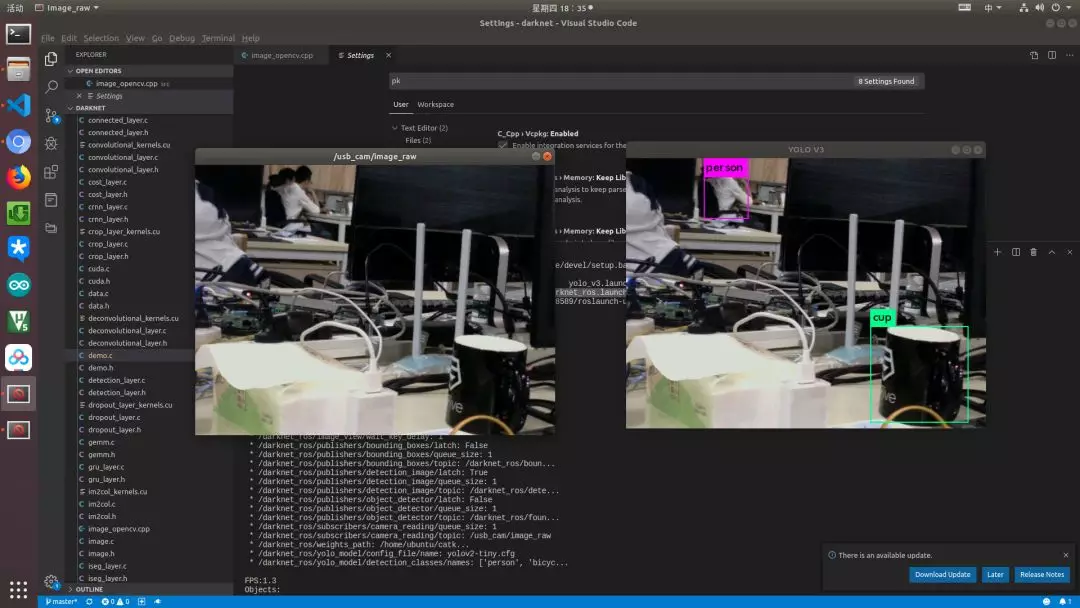
效果
下面这张图有两个视频流,左边的是没有处理的实时图像,右边是运行了目标检测的结果: