
使用 IAR 移植
本文介绍了如何基于 IAR 移植 RT-Thread Nano,并以一个 stm32f103 的基础工程作为示例进行讲解。
移植 Nano 的主要步骤:
- 准备一个基础的 IAR 工程,并获取 RT-Thread Nano 压缩包源码。
- 在基础工程中添加 RT-Thread Nano 源码,添加相应头文件路径。
- 适配 Nano,主要从 中断、时钟、内存、应用 这几个方面进行适配,实现移植。
- 最后可对 Nano 进行配置:Nano 是可裁剪的,通过配置文件 rtconfig.h 实现对系统的裁剪。
准备工作
- 下载 RT-Thread Nano 发布版本代码。
- 准备一份基础的裸机源码工程,如 LED 指示灯闪烁示例代码。
下载 Nano 源码
点击此处 下载 RT-Thread Nano 源码。
基础工程准备
在移植 RT-Thread Nano 之前,我们需要准备一个能正常运行的裸机工程。作为示例,本文使用的是基于 STM32F103 的一个 LED 闪烁程序。程序的主要截图如下:
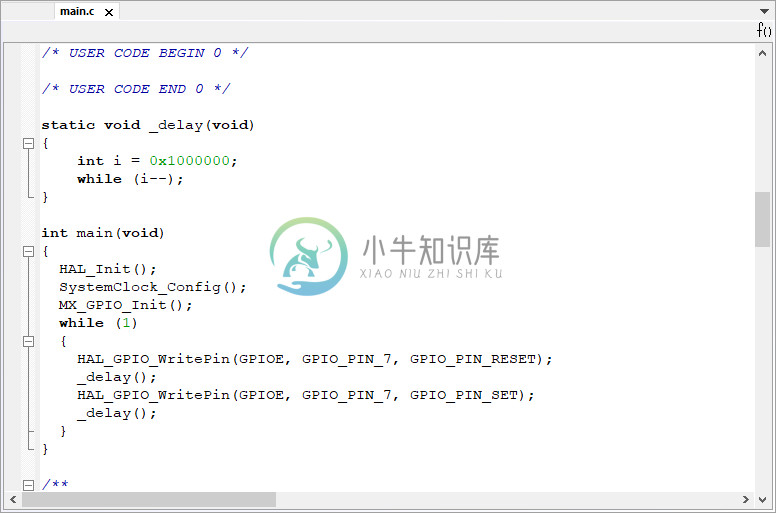
在我们的例程中主要做了系统初始化与 LED 闪烁功能,编译下载程序后,就可以看到开发板上的 LED 在闪烁了。读者可以根据自己的需要使用的芯片,准备一个类似的裸机工程。
添加 RT-Thread Nano 到工程
添加 Nano 源文件
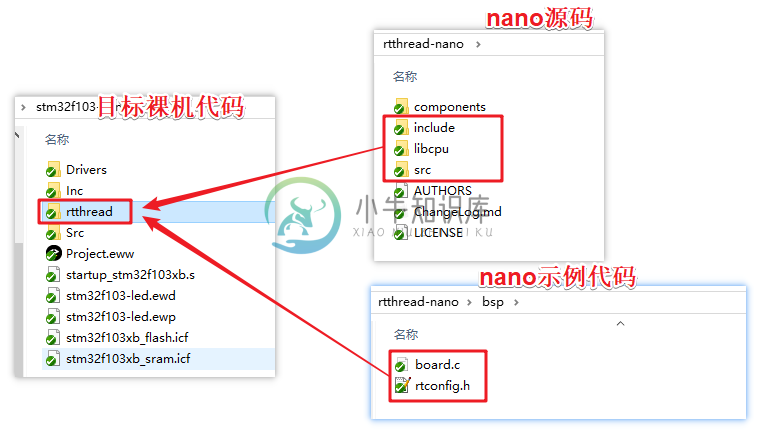
在准备好的 IAR 裸机工程下面新建 rtthread 文件夹,并在该文件中添加以下文件:
- Nano 源码中的 include、libcpu、src 文件夹。
- 配置文件:源码代码 rtthread/bsp 文件夹中的两个文件:
board.c与rtconfig.h。
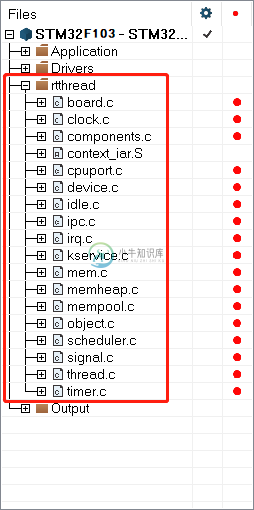
双击打开 IAR 裸机工程,新建 rtthread 分组,并在该分组下添加以下源码:
- 添加工程下 rtthread/src/ 文件夹中所有文件到工程;
- 添加工程下 rtthread/libcpu/ 文件夹中相应内核的 CPU 移植文件及上下文切换文件:
cpuport.c以及context_iar.S; - 添加 rtthread/ 文件夹下的
board.c。
Cortex-M 芯片内核移植代码:
context_iar.s
cpuport.cKernel 文件包括:
clock.c
components.c
device.c
idle.c
ipc.c
irq.c
kservice.c
mem.c
object.c
scheduler.c
thread.c
timer.c板级配置代码:
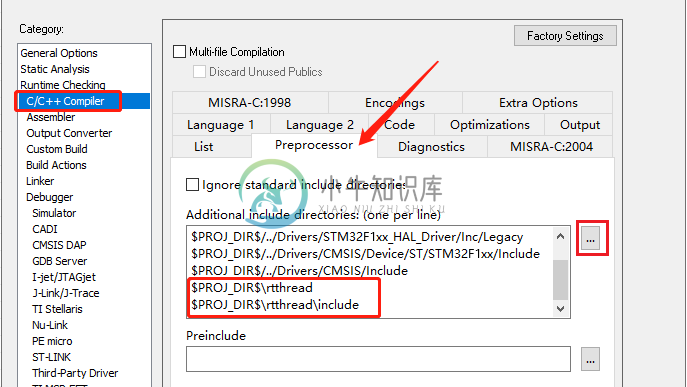
board.c添加头文件路径
点击 Project -> Options... 进入下图所示界面,添加 rtconfig.h 头文件所在位置的路径,添加 include 文件夹下的头文件路径。
适配 RT-Thread Nano
中断与异常处理
RT-Thread 会接管异常处理函数 HardFault_Handler() 和悬挂处理函数 PendSV_Handler(),这两个函数已由 RT-Thread 实现,所以需要删除工程里中断服务例程文件中的这两个函数,避免在编译时产生重复定义。如果此时对工程进行编译,没有出现函数重复定义的错误,则不用做修改。
系统时钟配置
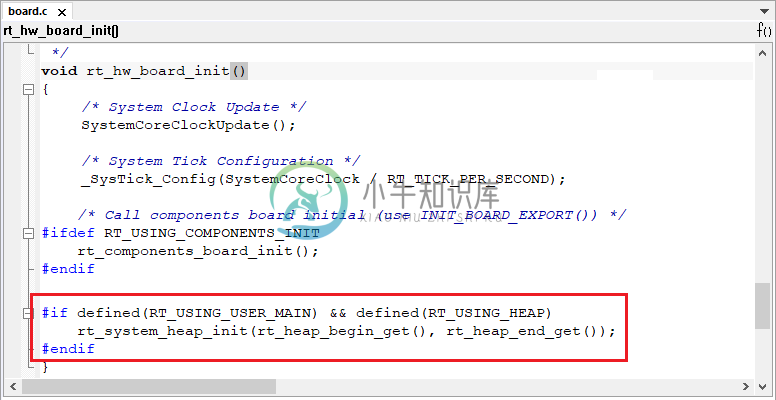
需要在 board.c 中实现 系统时钟配置(为 MCU、外设提供工作时钟)与 OS Tick 的配置(为操作系统提供心跳 / 节拍)。
如下代码所示, HAL_Init() 初始化 HAL 库, SystemClock_Config()配置了系统时钟, SystemCoreClockUpdate() 对系统时钟进行更新,_SysTick_Config() 配置了 OS Tick。此处 OS Tick 使用滴答定时器 systick 实现,需要用户在 board.c 中实现 SysTick_Handler() 中断服务例程,调用 RT-Thread 提供的 rt_tick_increase() ,如下图所示。
/* board.c */
void rt_hw_board_init()
{
HAL_Init();
SystemClock_Config();
/* System Clock Update */
SystemCoreClockUpdate();
/* System Tick Configuration */
_SysTick_Config(SystemCoreClock / RT_TICK_PER_SECOND);
/* Call components board initial (use INIT_BOARD_EXPORT()) */
#ifdef RT_USING_COMPONENTS_INIT
rt_components_board_init();
#endif
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
rt_system_heap_init(rt_heap_begin_get(), rt_heap_end_get());
#endif
}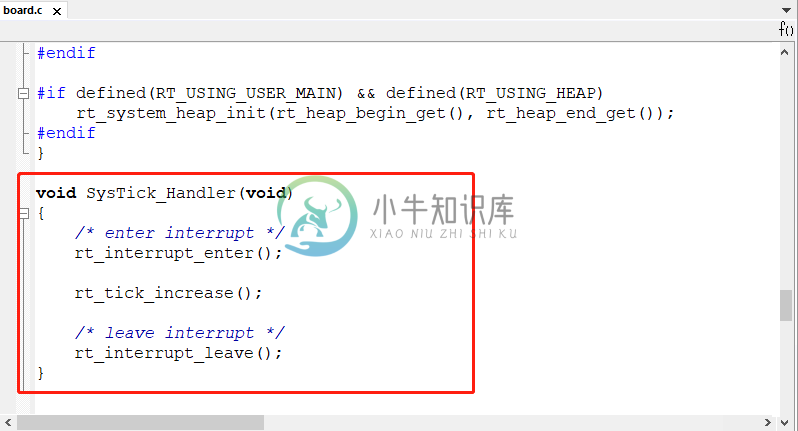
由于 SysTick_Handler() 中断服务例程由用户在 board.c 中重新实现,做了系统 OS Tick,所以还需要删除工程里中断服务例程文件中的 SysTick_Handler() ,避免在编译时产生重复定义。如果此时对工程进行编译,没有出现函数重复定义的错误,则不用做修改。
内存堆初始化
系统内存堆的初始化在 board.c 中的 rt_hw_board_init() 函数中完成,内存堆功能是否使用取决于宏 RT_USING_HEAP 是否开启,RT-Thread Nano 默认不开启内存堆功能,这样可以保持一个较小的体积,不用为内存堆开辟空间。
开启系统 heap 将可以使用动态内存功能,如使用 rt_malloc、rt_free 以及各种系统动态创建对象的 API。若需要使用系统内存堆功能,则打开 RT_USING_HEAP 宏定义即可,此时内存堆初始化函数 rt_system_heap_init() 将被调用,如下所示:
初始化内存堆需要堆的起始地址与结束地址这两个参数,系统中默认使用数组作为 heap,并获取了 heap 的起始地址与结束地址,该数组大小可手动更改,如下所示:
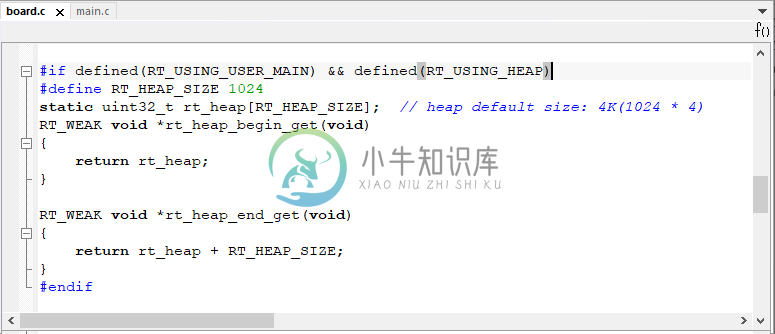
注意:开启 heap 动态内存功能后,heap 默认值较小,在使用的时候需要改大,否则可能会有申请内存失败或者创建线程失败的情况,修改方法有以下两种:
- 可以直接修改数组中定义的 RT_HEAP_SIZE 的大小,至少大于各个动态申请内存大小之和,但要小于芯片 RAM 总大小。
- 也可以参考《RT-Thread Nano 移植原理》——实现动态内存堆 章节进行修改,使用 RAM ZI 段结尾处作为 HEAP 的起始地址,使用 RAM 的结尾地址作为 HEAP 的结尾地址,这是 heap 能设置的最大值的方法。
编写第一个应用
移植好 RT-Thread Nano 之后,则可以开始编写第一个应用代码。此时 main() 函数就转变成 RT-Thread 操作系统的一个线程,现在可以在 main() 函数中实现第一个应用:板载 LED 指示灯闪烁,这里直接基于裸机 LED 指示灯进行修改。
- 首先在文件首部增加 RT-Thread 的相关头文件
<rtthread.h>。 - 在 main() 函数中(也就是在 main 线程中)实现 LED 闪烁代码:初始化 LED 引脚、在循环中点亮 / 熄灭 LED。
- 将延时函数替换为 RT-Thread 提供的延时函数 rt_thread_mdelay()。该函数会引起系统调度,切换到其他线程运行,体现了线程实时性的特点。

编译程序之后下载到芯片就可以看到基于 RT-Thread 的程序运行起来了,LED 正常闪烁。
注意事项:当添加 RT-Thread 之后,裸机中的 main() 函数会自动变成 RT-Thread 系统中 main 线程 的入口函数。由于线程不能一直独占 CPU,所以此时在 main() 中使用 while(1) 时,需要有让出 CPU 的动作,比如使用
rt_thread_mdelay()系列的函数让出 CPU。
与裸机 LED 闪烁应用代码的不同:
1). 延时函数不同: RT-Thread 提供的 rt_thread_mdelay() 函数可以引起操作系统进行调度,当调用该函数进行延时时,本线程将不占用 CPU,调度器切换到系统的其他线程开始运行。而裸机的 delay 函数是一直占用 CPU 运行的。
2). 初始化系统时钟的位置不同:移植好 RT-Thread Nano 之后,不需要再在 main() 中做相应的系统配置(如 hal 初始化、时钟初始化等),这是因为 RT-Thread 在系统启动时,已经做好了系统时钟初始化等的配置,这在上一小节 “系统时钟配置” 中有讲解。
配置 RT-Thread Nano
用户可以根据自己的需要通过打开或关闭 rtconfig.h 文件里面的宏定义,配置相应功能,如下是 rtconfig.h 的代码片段:
...
// <h>IPC(Inter-process communication) Configuration
// <c1>Using Semaphore
// <i>Using Semaphore
#define RT_USING_SEMAPHORE
// </c>
// <c1>Using Mutex
// <i>Using Mutex
//#define RT_USING_MUTEX // 打开此宏则使能互斥量的使用
// </c>
// <c1>Using Event
// <i>Using Event
//#define RT_USING_EVENT // 打开此宏则使能事件集的使用
// </c>
// <c1>Using MailBox
// <i>Using MailBox
//#define RT_USING_MAILBOX // 打开此宏则使能邮箱的使用
// </c>
// <c1>Using Message Queue
// <i>Using Message Queue
//#define RT_USING_MESSAGEQUEUE // 打开此宏则使能消息队列的使用
// </c>
// </h>
// <h>Memory Management Configuration
// <c1>Using Memory Pool Management
// <i>Using Memory Pool Management
//#define RT_USING_MEMPOOL // 打开此宏则使能内存池的使用
...RT-Thread Nano 默认未开启宏 RT_USING_HEAP,故只支持静态方式创建任务及信号量。若要通过动态方式创建对象则需要在 rtconfig.h 文件里开启 RT_USING_HEAP 宏定义。完整配置详见 《 RT-Thread Nano 配置》。