
使用PWM设备驱动蜂鸣器
基础知识
只有无源蜂鸣器才能够用来播放音乐。因为无源蜂鸣器振动的频率是可调的,而有源蜂鸣器的振动频率是固定的。只有频率(也就是音高)可调,才能够播放简单的音乐。由于无源蜂鸣器需要有震荡信号才能发出声音,所以需要使用 PWM 设备来控制蜂鸣器的播放。
为了给用户提供产生 PWM 的通用 API,方便应用程序开发,RT-Thread 中引入了 PWM 设备驱动。并提供 API 用于操作 PWM 设备,如设置 PWM 的周期及高电平的脉宽、开启 PWM 通道的输出、关闭 PWM 通道的输出。
常用的 PWM 设备的 API 有以下几个:
| API | 描述 |
|---|---|
| rt_pwm_set | 设置 PWM 某一通道的参数 |
| rt_pwm_enable | 开启 PWM 通道的输出 |
| rt_pwm_disable | 关闭 PWM 通道的输出 |
开启 PWM 功能
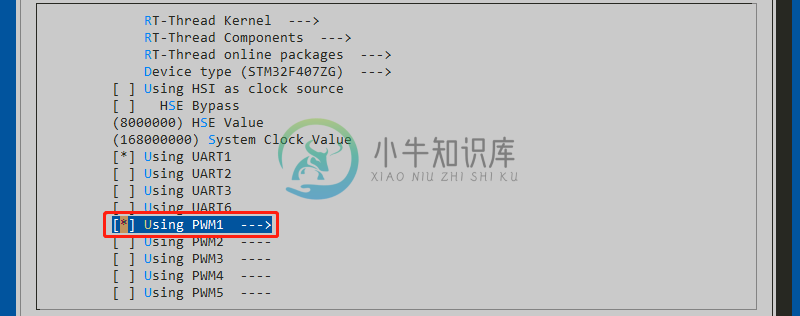
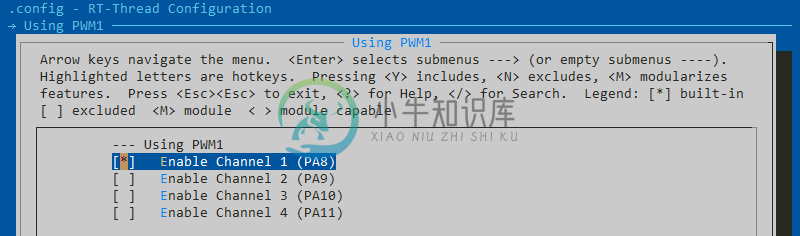
要使用 PWM 设备需要在 Env 中开启 PWM 设备,如下所示。然后回车,在具体的配置里开启通道一,保存并重新生成工程。
硬件连接
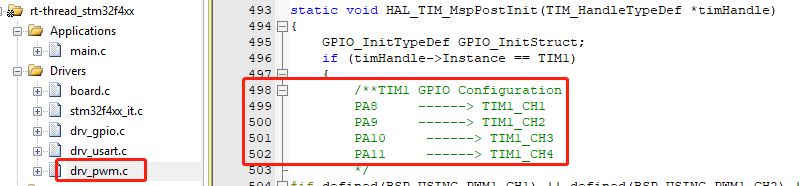
由于 PWM 设备是基于定时器 Timer 实现的,所以只有与定时器相应通道连接的管脚才能输出 PWM。查看已经实现的 PWM 设备的驱动文件 drv_pwm.c,从中可以看到当前 PWM 设备支持的管脚,我们选择与 TIM1 通道1对应的管脚 PA8 作为驱动蜂鸣器的管脚。
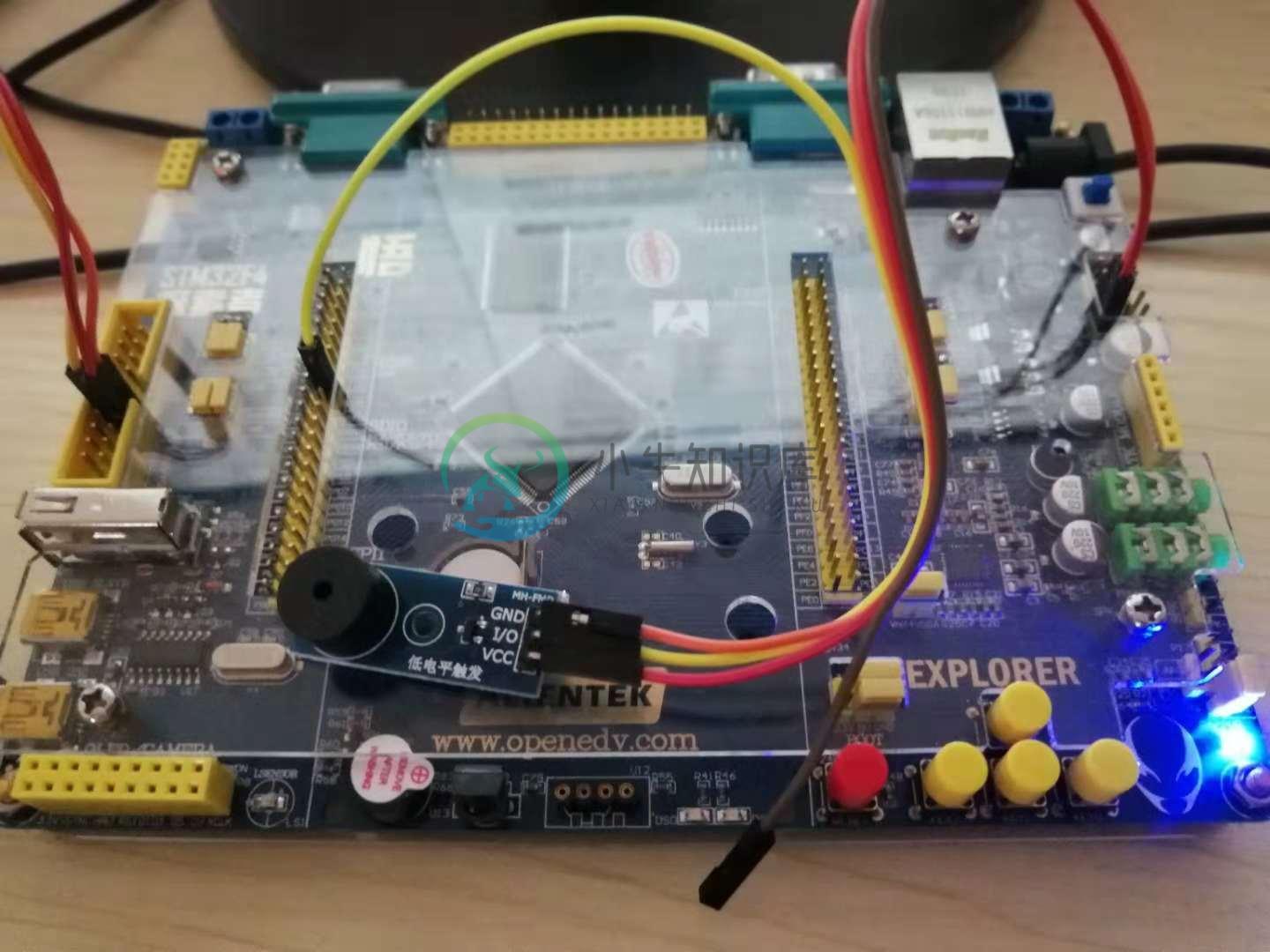
使用杜邦线将无源蜂鸣器和开发板连接起来,其中 VCC 接 3.3V,GND 接 GND, I/O 引脚连接开发板的 PA8。
软件实现
利用 RT-Thread 的 PWM 设备可以很轻松的控制 IO 口输出的脉冲的频率和占空比,这就为控制蜂鸣器提供了方便。我们可以将 PWM 设备的 API 封装成函数,来作为蜂鸣器的控制接口,例如我们可以封装成下面的四个函数,一个初始化函数,一个开、一个关,再加一个设定频率和响度的函数,就能很好的控制蜂鸣器了。
static int beep_init(void); //蜂鸣器初始化
static int beep_on(void); //蜂鸣器开
static int beep_off(void); //蜂鸣器关
static int beep_set(uint16_t freq, uint8_t volume); //蜂鸣器设定同样我们新建一个 beep.h 的文件,将上面的这些函数声明放到 beep.h 文件里,方便其他文件的调用。直接在头文件里使用 uint16_t/uint8_t 的数据类型会报错,因此在头文件里包含 rtthread.h 头文件。
为了程序更好的可移植性,把 beep 使用的 PWM 设备用宏定义的方式来表示,如下所示:
#define BEEP_PWM_DEVICE "pwm1"
#define BEEP_PWM_CH 1最后 beep.h 文件中内容如下所示:
#ifndef BEEP_H
#define BEEP_H
#include <rtthread.h>
#define BEEP_PWM_DEVICE "pwm1"
#define BEEP_PWM_CH 1
int beep_init(void); //蜂鸣器初始化
int beep_on(void); //蜂鸣器开
int beep_off(void); //蜂鸣器关
int beep_set(uint16_t freq, uint8_t volume); //蜂鸣器设定
#endif然后再新建一个 beep.c 文件,在文件里添加下面的头文件
#include <rtdevice.h> //使用 RT-Thread 的设备需要包含此头文件然后在文件 beep.c 里分别实现上面的几个 API。
蜂鸣器初始化
static int beep_init(void); //蜂鸣器初始化要想使用某一个 PWM 设备(例如 PWM1),需要先依据名字获取到设备的控制块,然后在调用 PWM 的 API 时作为参数传入。
为了能够使用 API 控制 PWM 设备,在蜂鸣器初始化函数里,需要获取 PWM 设备的设备控制块。
struct rt_device_pwm *pwm_device = RT_NULL; //定义 pwm 设备指针
int beep_init(void)
{
/* 查找PWM设备 */
pwm_device = (struct rt_device_pwm *)rt_device_find(BEEP_PWM_DEVICE);
if (pwm_device == RT_NULL)
{
rt_kprintf("pwm device %s not found!\n", BEEP_PWM_DEVICE);
return -RT_ERROR;
}
return 0;
}打开蜂鸣器
int beep_on(void); //蜂鸣器开在打开蜂鸣器的函数里,通过调用 rt_pwm_enable API 开启 PWM 通道的输出功能。
static int beep_on(void)
{
rt_pwm_enable(pwm_device, BEEP_PWM_CH); //使能蜂鸣器对应的 PWM 通道
return 0;
}关闭蜂鸣器
int beep_off(void); //蜂鸣器关在关闭蜂鸣器的函数里,通过调用 rt_pwm_disable API 关闭 PWM 通道的输出功能。
int beep_off(void)
{
rt_pwm_disable(pwm_device, BEEP_PWM_CH); //失能蜂鸣器对应的 PWM 通道
return 0;
}蜂鸣器设定
static int beep_set(uint16_t freq, uint8_t volume); //蜂鸣器设定在蜂鸣器设定函数里需要设定 蜂鸣器的频率和音量。PWM 设备设定的 API 是设定 周期 和 脉宽 的,因此我们需要转换一下,将频率装换成周期,将音量大小(占空比)转换成脉宽。这里的周期的单位是 ns,因此转换成的 秒 之后还要乘以 10^9 。由于无源蜂鸣器一般是低电平触发的,因此音量越大对应的脉宽就要越小。然后,将转换后的数据传入 rt_pwm_set 来设置 PWM 设备的参数。
static int beep_set(uint16_t freq, uint8_t volume)
{
rt_uint32_t period, pulse;
/* 将频率转化为周期 周期单位:ns 频率单位:HZ */
period = 1000000000 / freq; //unit:ns 1/HZ*10^9 = ns
/* 根据声音大小计算占空比 蜂鸣器低电平触发 */
pulse = period - period / 100 * volume;
/* 利用 PWM API 设定 周期和占空比 */
rt_pwm_set(pwm_device, BEEP_PWM_CH, period, pulse);//channel,period,pulse
return 0;
}示例程序
这样就可以在 main.c 里包含 beep.h 头文件,然后使用这些 API 来控制蜂鸣器了。
下面是一段控制无源蜂鸣器依次播放音符 CDEFGAB 的一段程序。
#include <rtthread.h>
#include "beep.h"
uint16_t freq_tab[12] = {262, 277, 294, 311, 330, 349, 369, 392, 415, 440, 466, 494}; //原始频率表 CDEFGAB
uint8_t beep_volume = 3;
int main(void)
{
/* user app entry */
int i;
beep_init();
for (i = 0; i < 12; i++)
{
beep_set(freq_tab[i], beep_volume);
beep_on();
rt_thread_mdelay(500);
beep_off();
rt_thread_mdelay(500);
}
return 0;
}