ROS - Gazebo Octomap
translated_page: https://github.com/PX4/Devguide/blob/master/en/simulation/gazebo_octomap.md
translated_sha: 95b39d747851dd01c1fe5d36b24e59ec865e323e
OctoMap 3D Models with ROS/Gazebo
OctoMap库实现了一个三维占据栅格地图的方法。本文介绍如何在RotorS仿真中使用它。
安装
需要预先安装ROS,Gazebo和Rotors Simulator插件,按照Rotors Simulator中的指南安装这些。
接着,安装OctoMap库
sudo apt-get install ros-indigo-octomap ros-indigo-octomap-mappingrosdep install octomap_mappingrosmake octomap_mapping
现在,打开~/catkin_ws/src/rotors_simulator/rotors_gazebo/CMakeLists.txt并在文件底部添加下面内容:
find_package(octomap REQUIRED)include_directories(${OCTOMAP_INCLUDE_DIRS})link_libraries(${OCTOMAP_LIBRARIES})
打开~/catkin_ws/src/rotors_simulator/rotors_gazebo/package.xml添加下面内容:
<build/depend>octomap</build/depend><run_depend>octomap</run_depend>
执行下面两行
提示:第一行是将默认的shell编辑器(vim)修改为gedit。推荐不熟悉vim的用户使用,如果熟悉的话,可以忽略。
export EDITOR='gedit'rosed octomap_server octomap_tracking_server.launch
将下面两行
<param name="frame_id" type="string" value="map" />...<!--remap from="cloud_in" to="/rgbdslam/batch_clouds" /-->
修改为
<param name="frame_id" type="string" value="world" />...<remap from="cloud_in" to="/firefly/vi_sensor/camera_depth/depth/points" />
运行仿真
现在,在三个不同的终端窗口中执行下面三行。这将打开Gazebo,Rviz和octomap服务器。
roslaunch rotors_gazebo mav_hovering_example_with_vi_sensor.launch mav_name:=fireflyrvizroslaunch octomap_server octomap_tracking_server.launch
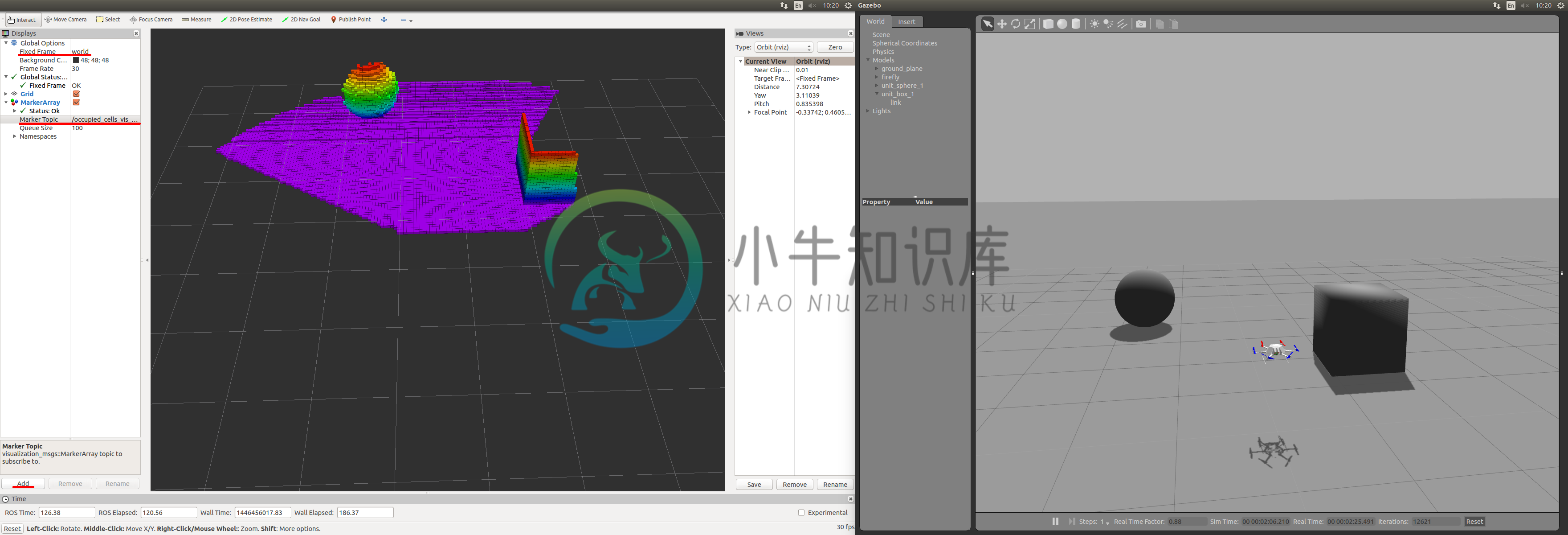
在Rviz窗口的左上方,修改域Fixed Frame,将map改为world,然后在窗口左下方单击add按钮并选择MarkerArray,最后双击MarkerArray,并将Marker Topic从/free_cells_vis_array修改为/occupied_cells_vis_array。
现在,你应该看到地面的一部分。
在Gazebo窗口的红色旋翼飞行器前方插入一个立方体,此时你应该可以在Rviz中看到它。