
2.4 感知机的局限性
到这里我们已经知道,使用感知机可以实现与门、与非门、或门三种逻辑电路。现在我们来考虑一下异或门(XOR gate)。
2.4.1 异或门
异或门也被称为逻辑异或 电路。如图 2-5 所示,仅当 ![]() 或
或 ![]() 中的一方为 1 时,才会输出 1(异或是拒绝其他的意思)。那么,要用感知机实现这个异或门的话,应该设定什么样的权重参数呢?
中的一方为 1 时,才会输出 1(异或是拒绝其他的意思)。那么,要用感知机实现这个异或门的话,应该设定什么样的权重参数呢?

图 2-5 异或门的真值表
实际上,用前面介绍的感知机是无法实现这个异或门的。为什么用感知机可以实现与门、或门,却无法实现异或门呢?下面我们尝试通过画图来思考其中的原因。
首先,我们试着将或门的动作形象化。或门的情况下,当权重参数 ![]() 时,可满足图 2-4 的真值表条件。此时,感知机可用下面的式(2.3)表示。
时,可满足图 2-4 的真值表条件。此时,感知机可用下面的式(2.3)表示。

式(2.3)表示的感知机会生成由直线 ![]() 分割开的两个空间。其中一个空间输出 1,另一个空间输出 0,如图 2-6 所示。
分割开的两个空间。其中一个空间输出 1,另一个空间输出 0,如图 2-6 所示。
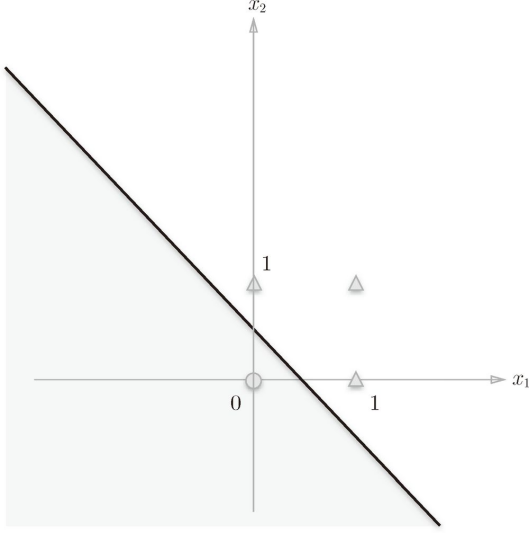
图 2-6 感知机的可视化:灰色区域是感知机输出 0 的区域,这个区域与或门的性质一致
或门在 ![]() 时输出 0,在
时输出 0,在 ![]() 为 (0, 1)、(1, 0)、(1, 1) 时输出 1。图 2-6 中,○ 表示 0,△ 表示 1。如果想制作或门,需要用直线将图 2-6 中的○和△分开。实际上,刚才的那条直线就将这 4 个点正确地分开了。
为 (0, 1)、(1, 0)、(1, 1) 时输出 1。图 2-6 中,○ 表示 0,△ 表示 1。如果想制作或门,需要用直线将图 2-6 中的○和△分开。实际上,刚才的那条直线就将这 4 个点正确地分开了。
那么,换成异或门的话会如何呢?能否像或门那样,用一条直线作出分割图 2-7 中的○和△的空间呢?
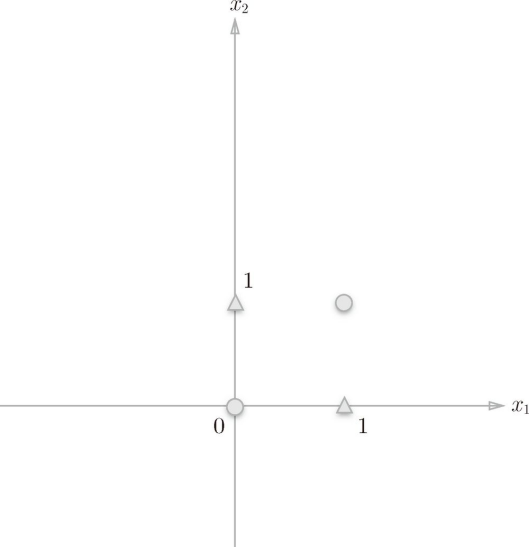
图 2-7 ○ 和 △ 表示异或门的输出。可否通过一条直线作出分割○和△的空间呢?
想要用一条直线将图 2-7 中的○和△分开,无论如何都做不到。事实上,用一条直线是无法将○和△分开的。
2.4.2 线性和非线性
图 2-7 中的○和△无法用一条直线分开,但是如果将直线这个限制条件去掉,就可以实现了。比如,我们可以像图 2-8 那样,作出分开○和△的空间。
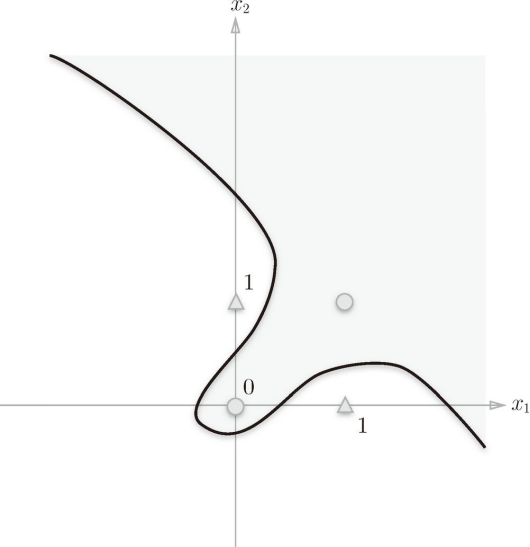
图 2-8 使用曲线可以分开○和△
感知机的局限性就在于它只能表示由一条直线分割的空间。图 2-8 这样弯曲的曲线无法用感知机表示。另外,由图 2-8 这样的曲线分割而成的空间称为非线性 空间,由直线分割而成的空间称为线性 空间。线性、非线性这两个术语在机器学习领域很常见,可以将其想象成图 2-6 和图 2-8 所示的直线和曲线。