
Android 全链路通用方案
1.1.1. 目录
1.1.2. 一、概述
Rokid全链路通用方案
Rokid 全链路系统集成是指选择 Rokid 全链路 SDK 下载后,通过修改Android 源码方式集成SDK,集成 SDK 成功后,可以获取Rokid 前端语音激活/降噪以及 Rokid 语音识别/语音合成服务的相关能力.
- 前端语音能力
- 将麦克风阵列中的语音数据转换成对应的前端语音激活/休眠等事件. Rokid 提供的前端语音能力可为合作伙伴提供语音自身音源降噪处理/回声消除/环境噪音降噪处理等
- 语音识别服务
- 语音识别可以通过开发者提供的原始语音数据/经过算法处理过的语音数据识别成对应的自然语言(ASR),以及对应的自然语言处理(NLP)信息
- 语音合成服务(TTS)
- Rokid语音合成服务可以根据开发者提供的文字合成高质量的音频。
软件框架简介
- 支持的Android OS
- 目前SDK支持Android5.0及以上系统
- SDK下载
- 请在 https://developer.rokid.com 上下载SDK
- SDK目录结构
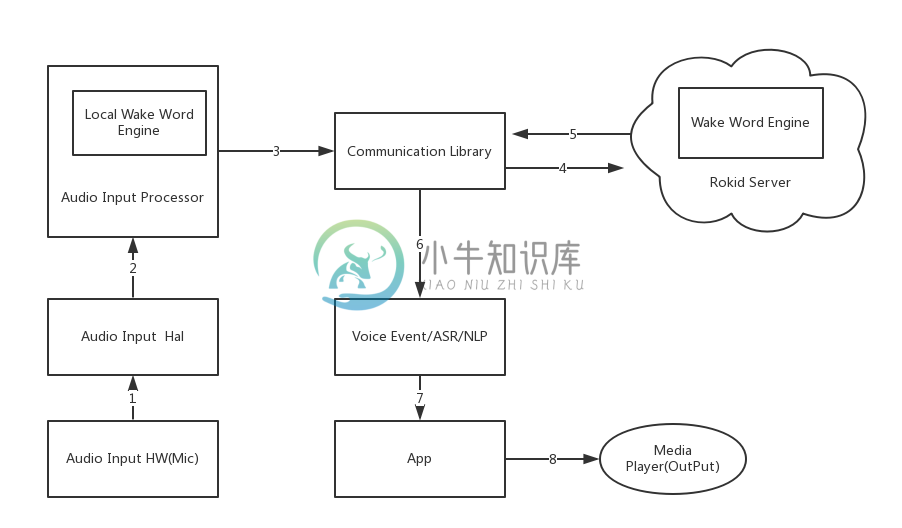
- 软件设计框架图
1.1.3. 二、硬件示例
可参考Rokid官方提供的开发套件,获取方式: 从Rokid官网获取 rokid all in one 全栈语音解决方案 开发套件 目前支持硬件指标为:
- RAM 512M及以上
- Mic阵列支持 线2麦/线4麦/圈4麦/圈6麦
1.1.4. 三、软件架构
SDK目录结构
config
- workdir_asr_cn目录
- 前端mic硬件配置以及激活模型文件目录,其中
ctc.xxx.cfg文件为配置激活词信息以及,device.xxx.cfg文件为麦克风阵列相关配置文件.workdir_asr_cn目录中的配置文件一旦生成,不允许私自修改内容及文件名. 需要将这个文件夹放置到/system/目录下
- 前端mic硬件配置以及激活模型文件目录,其中
- openvoice_profile.json
- RokidAiCloudApp中部分网络 读取 key、secret、deviceTypeId、deviceId 属性的默认配置文件,可以放置在系统的/etc/目录下,保持高得优先级。
- speech_config.json
- SpeechExecutor service 读取 key、secret、deviceTypeId、deviceId 属性的默认配置文件,可以放置在系统的/etc/目录下,保持高得优先级。
- tts_config.json
- TtsService service 读取 key、secret、deviceTypeId、deviceId 属性的默认配置文件,可以放置在系统的/etc/目录下,保持高得优先级。
doc
- 散落的说明文件
- NlpConsumer
- NlpConsumer 的 javadoc 文件夹
executable
turenproc ---- 前端拾音服务 链接mic数据读取以及语音识别服务(speech)模块的可执行进程
android-libraries文件列表
- NlpConsumer
- 存放rokid_nlp_consumer_release_1.0.aar文件,包含Consumer处理类,完成NLP分发给对应的Service或Activity,需要在SystemVoiceDemo中引入。
- 提供一套NLP拦截机制,可以拦击其中任意一个NLP处理。
- RokidAiCloudApp
- 存放RokidAiCloudApp.apk文件,此安装软件主要完成实际的云端技能处理,如果想要使用Rokid默认的处理云端机制,必须安装此apk。
shared-libraries文件列表
armeabi-v7a
- libc++_shared.so
- libr2aec.so
- libr2aliaec.so
- libr2am.so
- libr2aud.so
- libr2base.so
- libr2bbf.so
- libr2en.so
- libr2mvdrbf.so
- libr2sbbf.so
- libr2sl.so
- libr2ssp.so
- libr2vp.so
- librasr.so
- librfe.so
- librkcodec.so
- librkvoicerec.so
- librlog.so
- librokid_opus_jni.so
- librokid_speech_jni.so
- libsourcelocation.so
- libspeech.so
- libtensorflow_inference.so
- libtensorflow_lite.so
- libtfam.so
- libtfrtl_lite.so
- libtfrtl.so
- libturen.so
- libturenrpc.so
- libuWS.so
- libztvad.so
说明:
- common
- libc++_shared.so
- 语音识别以及合成服务相关
- librkcodec.so
- librkvoicerec.so
- librokid_opus_jni.so
- librokid_speech_jni.so
- libspeech.so
- libuWS.so
目前对应turen so 版本:
example
- SystemVoiceDemo
- 源码示例程序1(android 源码编译集成前端 + speech 的示例程序 ,目录:SystemVoiceDemo),详细模块说明请查看SystemVoiceDemo说明
SystemVoiceDemo说明
模块功能简介
- 该模块为与前端数据交互的中间桥接模块,源码集成编译全链路
SDK后,在网络OK并且turenproc正常启动后,启动该模块的SpeechExecutor的service,即可建立与前端的数据通讯,可接收前端的激活/ASR/NLP等事件.
模块文件树
├── AndroidManifest.xml
├── assets
│ └── speech_config.json
├── libs
│ └── rokid_nlp_consumer_release_1.0.aar
├── res
├── aidl
│ └── com.rokid.voicerec.IRokidAi.aidl
└── src
└── com
└── rokid
└── voicerec
├── MainActivity.java
├── ActionToComponent.java
├── Constans.java
├── ForwardMsg.java
├── VoiceApplication.java
├── AutoStartReceiver.java
└── SpeechExecutor.java
模块主要功能点
libs/rokid_nlp_consumer_release_1.0.aar文件- 包含Consumer处理类,完成NLP分发给对应的Service或Activity。
- 提供ServerSocket和ClientSocket基础SDK,未非kenobi用法提供pcm数据跨进程提供能力。
- 提供Turen Pcm数据收集器,用socket形式不断收集算法处理后的pcm数据。
- 提供广播方式处理与RokidAiCloudApp交互,完成主动拾音、更新协议栈等功能。
- 提供一套NLP拦截机制,可以拦击其中任意一个NLP处理。
assets/speech_config.json文件- 此文件在
SpeechExecutor.java中通过loadConfigs()方法读取,然后通过parseSpeechConfig(String json)方法将配置文件中的配置解析出来,然后初始化VoiceRecognize. 此处解析非常重要,如下四处配置,客户需自行配置,如配置有误,会造成语音交互异常'key': '', ----用户在Rokid开发者网站上申请设备类型时生成的key 'device_type_id': '',----用户在Rokid开发者网站上申请设备类型时生成的Type ID 'secret': '',----用户在Rokid开发者网站上申请设备类型时生成的Secret 'device_id': '' ----用户设备唯一码,可在SpeechExecutor的源码中parseSpeechConfig函数中根据客户的获取方法进行修改 - 关于
speech_config.json,会默认以先从系统的/system/etc/文件目录下读取,如果文件不存在,则使用assets目录中的speech_config.json文件,为了实现上述变量的动态配置,可以将speech_config.json文件放到系统/system/etc/目录下。 - 此外,
device_id会默认以系统prop中的"ro.sys.rokid.serialno"属性(Constans.PRODUCT_ID)值为最高优先级。
- 此文件在
src为SystemVoiceDemoapkJava端实现部分:Constans.java一些固定配置。MainActivity.javaActivity,用来测试SpeechExecutor 这个service,使用时替换成自己的。ActionToComponent.java为将exec_config.json配置的action解析成android对应Component的工具类AutoStartReceiver.java监听开机广播,然后启动SpeechExecutor的service,在android M版本之后data下应用无此权限,system应用在运行一次后才有此权限.SpeechExecutor.java模块逻辑主要实现部分,主要有一下几点:loadConfigs(); ----从文件中读取key/secret等信息,做为参数初始化SDK,另外初始化语音激活事件/ASR/NLP的消费者,具体的消费者需要用户根据实际实现来动态配置exec_config.jsonprivate void initVoiceRecognize(){ mVoiceRecognize = new VoiceRecognizeBuilder() .setHost(mSpeechParam.host) .setPort(mSpeechParam.port) .setBranch(mSpeechParam.branch) .setKey(mSpeechParam.key) .setSecret(mSpeechParam.secret) .setDeviceTypeId(mSpeechParam.deviceTypeId) .setDeviceId(mSpeechParam.deviceId) .setCallback(this) .build(); }创建NlpConsumerManager实例,完成NLP处理传输,配置拦截器,实现INlpConsumerListener回调方法。返回IRokidAi binder,对外实现使用String asr来向服务器获取相应的Nlp、action功能。此初始化动作将前端需要的一些配置(在
speech_config.jso配置)传递过去,并建立与前端的通讯.同时设置回调函数接口VoiceRecognize.Callback接收前端Voice事件以及ASR/NLP消息.在建立通讯成功后,即可通过VoiceRecognize.Callback相关的回调接口拿到响应的Voice/ASR/NLP事件.VoiceRecognize.Callback
void onVoiceEvent(int id,Event event, float sl, float energy); ----接收前端Voice事件,第一个参数Event为具体的event值,第二个参数(sl)为寻向角度,第三个参数(energy)为语音的能量值,此值程序暂时不需要关心,只做调试使用.void onIntermediateResult(int id,String asr, boolean isFinal); ----接收ASR,第一个参数为ASR的具体内容,第二个参数表示此ASR为中间识别结果 还是最终识别结果.false代表中间识别结果,比如语音输入"今天天气怎么样"时,ASR会阶段性的返回"今天"/"今天天气"/"今天天气怎么样"void onRecognizeResult(int id,String nlp, String action); ----nlp的识别结果,第一个参数代表语音命中的具体NLP,如果为本地应用,需要解析此nlp来执行响应动作,如果为云端应用,则需要解析第二个参数(action)来执行对应的协议内容.void onException(int id,int errCode); ----语音数据交互过程中出现异常,参数为异常的errCode以上几个函数定义可参考详细的接口文档介绍Android全链路接口调用说明.
1.1.5. 四、全链路集成
前端算法相关配置文件
- 配置
ctc.xxx.cfg,其中xxx值为android编译源码是的${TARGET_DEVICE}的值phonetable=phonetable ctc=rasr.emb.ini words=ruoqi,meishile asr.line.num=4 bf.num=12 - phonetable: 音素表配置
- ctc: 激活模型配置
words: 激活词配置,如上两个分别对应
workdir_asr_cn下的word.ruoqi.cfg和word.meishile.cfg配置
device.xxx.cfg, 其中xxx值为android编译源码是的${TARGET_DEVICE}的值- audio.rate=48000 // 采样率
- audio.type=int16 // 采样位(short/int16/float32)
- mic.num=8 // 麦克风个数,根据实际数量配置
- in.mics =0,1,2,3,6,7 // 麦克风个数,根据实际输入通道进行配置
- rs.mics =0,1,2,3 // 重采样通道,根据实际输入通道进行配置, 内容为in.mics配置数组的下标
- aec.mics=0,1,2,3 // aec声道,根据实际输入通道进行配置, 内容为in.mics配置数组的下标
- ref.mics=4,5 // 参考声道,根据实际输入通道进行配置, 内容为in.mics配置数组的下标
- in.mics.big.0 =1 // 0声道采样值放大系数,如无此参数,则表示不放大,默认可以先不配置
- in.mics.big.1 =1 // 1声道采样值放大系数,如无此参数,则表示不放大,默认可以先不配置
- in.mics.big.2 =1 // 2声道采样值放大系数,如无此参数,则表示不放大,默认可以先不配置
- in.mics.big.3 =1 // 3声道采样值放大系数,如无此参数,则表示不放大,默认可以先不配置
- in.mics.big.4 =1 // 4声道采样值放大系数,如无此参数,则表示不放大,默认可以先不配置
- in.mics.big.5 =1 // 5声道采样值放大系数,如无此参数,则表示不放大,默认可以先不配置
- in.mics.big.6 =1 // 6声道采样值放大系数,如无此参数,则表示不放大,默认可以先不配置
- in.mics.big.7 =1 // 7声道采样值放大系数,如无此参数,则表示不放大,默认可以先不配置
- bf.mics=0,1,2,3 //波束声道道,根据实际输入通道进行配置
- mic.pos.0= 0.03000000, 0.00000000, 0.00000000 // 0mic 坐标位置
- mic.pos.1= 0.00000000, 0.03000000, 0.00000000 // 1mic 坐标位置
- mic.pos.2= -0.03000000, 0.00000000, 0.00000000 // 2mic 坐标位置
- mic.pos.3= 0.00000000, -0.03000000, 0.00000000 // 3mic 坐标位置
- mic.pos.4= 0,0,0 // 4mic 坐标位置
- mic.pos.5= 0,0,0 // 5mic 坐标位置
- mic.pos.6= 0,0,0 // 6mic 坐标位置
- mic.pos.7= 0,0,0 // 7mic 坐标位置
- mic.delay=0,0,0,0,0,0,0,0 //ref通道不同时延时配置,默认都为0
- codec=true // 是否opu编码后上传给服务端,默认需要
- light.angle0=180 // 灯光起始角度
- light.angle.mul=1 // 灯光角度偏移系数, 1/-1, 顺时针/逆时针
将配置OK的前端配置文件放入
SDK的config/workdir_asr_cn/目录下
mic_array简要实现
mic_array 要实现的功能
- mic_array模块要实现麦克风阵列的打开/读取数据功能,然后turenproc进程会根据标准的
android hw_module_t的open/start_stream/read_stream等方法读取mic阵列的数据,送给前端算法,进行数据处理.
mic_array要实现的接口
int (*get_stream_buff_size) (struct mic_array_device_t *dev);
int (*start_stream) (struct mic_array_device_t *dev);
int (*stop_stream) (struct mic_array_device_t *dev);
int (*finish_stream) (struct mic_array_device_t * dev);
int (*resume_stream) (struct mic_array_device_t *dev);
int (*read_stream) (struct mic_array_device_t *dev, char *buff, unsigned int frame_cnt);
int (*config_stream) (struct mic_array_device_t *dev, int cmd, char *cmd_buff);
- 如上接口均为audio hal层标准命名接口(可参考 mic_array.h 定义),需要各个厂商根据自己硬件麦克风阵列的打开以及读取方式,实现对应接口
mic_array 模块编译参考
LOCAL_PATH := $(call my-dir)
include $(CLEAR_VARS)
LOCAL_SRC_FILES := mic_array.c
LOCAL_MODULE_PATH := $(TARGET_OUT_SHARED_LIBRARIES)/hw
LOCAL_MODULE := mic_array.$(TARGET_DEVICE)
LOCAL_MODULE_TAGS := optional
LOCAL_C_INCLUDES += hardware/libhardware \
external/tinyalsa/include
LOCAL_SHARED_LIBRARIES := liblog libcutils libtinyalsa
LOCAL_MODULE_TARGET_ARCH := arm
include $(BUILD_SHARED_LIBRARY)
- 参考如上
Android.mk的编写方式,在android源码中编译时,会将mic_array模块编译为mic_array.{TARGET_DEVICE}.so,生成目录为out/target/product/{TARGET_DEVICE}/system/lib/hw/
mic_array 几个主要的参数
static struct pcm_config pcm_config_in = {
.channels = 8,
.rate = 48000,
.period_size = 1024,
.period_count = 8,
.format = PCM_FORMAT_S32_LE,
};
配置硬件麦克风阵列的录音参数
channels为麦克风声道数,表示录音时有几路输入rate为麦克风录音时的采样率,即每秒的采样次数,针对帧而言,目前支持最少16000period_size每次硬件中断处理音频数据的帧数period_count处理完一个buffer数据所需的硬件中断次数format样本长度,音频数据最基本的单位,比如PCM_FORMAT_S32_LE/PCM_FORMAT_S24_LE- 麦克风阵列每秒读取的数据大小取决于
channels/rate/format/,比如format为PCM_FORMAT_S32_LE(4 byte),channels为 8 ,rate为 48000,时,麦克风阵列每秒读取数据大小为48000*8*4 = 1536000(byte), 麦克风阵列每一次读取数据的大小为period_countperiod_size,每次读取的数据都是分帧组合,每一帧(frame_size)大小取决于channel以及format,比如channel为 8,format为PCM_FORMAT_S32_LE时,每一帧的大小则为 ```84 = 32(byte),每一次读取的数据帧数frame_cnt即get_stream_buff_size方法获取的数据大小为period_count*period_size/frame_size, 此大小建议根据麦克风每秒输入数据总大小进行配置,以10ms/次的消费速度消费数据.同时每次读取的数据需要根据format和channels的配置,按照channels的顺序进行排列.比如format为PCM_FORMAT_S32_LE,channels``` 为 8,则每帧数据格式如下|32byte(mic0)|32byte(mic1)|32byte(mic2)|32byte(mic3)|32byte(mic4)|32byte(mic5)|32byte(mic6)|32byte(mic7)|32byte(mic0)|32byte(mic1)|32byte(mic2)|32byte(mic3)|32byte(mic4)|32byte(mic5)|32byte(mic6)|32byte(mic7)|.|.|.|.|.|.|.|.|
static struct hw_module_methods_t mic_array_module_methods = { .open = mic_array_device_open, }; struct mic_array_module_t HAL_MODULE_INFO_SYM = { .common = { .tag = HARDWARE_MODULE_TAG, .version_major = 1, .version_minor = 0, .id = "mic_array", .name = "mic_array", .author = "xxxxxxxx", .methods = &mic_array_module_methods, }, };- 定义android标准的
HAL_MODULE_INFO_SYM,其中id和name必须使用mic_array,否则turenproc进程在运行时会提示[Error] Mic Array init (not found mic_array.xxx.so) : -2
快速验证
mic_array的功能实现后,将生成的out/target/product/{TARGET_DEVICE}/system/lib/hw/mic_array.$(TARGET_DEVICE).so通过adb push命令push到设备system/lib/hw/目录下.- 将下载的
SDK中shared-libraries/armeabi-v7a下的so通过adb push的方式 推到设备/system/lib/中,比如在SDK解压目录下通过adb push shared-libraries/armeabi-v7a/*.so /system/lib/的命令将so推到设备的/system/lib/下 - 将下载的
SDK中executable下的turenproc通过adb push的方式 推到设备/system/bin/中,比如在SDK解压目录下通过adb push executable/turenproc /system/bin/的命令将turenproc推到设备的/system/bin/下 - 将下载的
SDK中config下的workdir_asr_cn文件夹通过adb push的方式 推到设备/system/中,比如在SDK解压目录下通过adb push config/workdir_asr_cn /system/的命令将workdir_asr_cn推到设备的/system/下 - 按照上边的
adb push命令将所需文件推到设备对应目录后,运行如下命令
将adb root adb shell turenproc 30000 xxxx($TARGET_DEVICE)turenproc进程拉起来,查看输出日志是否有Error字样,如果无,则表明turenproc进程可以从集成的mic_array.xxx.so中读取到mic数据
系统预置sdk
预置sdk
- 将解压后的目录放到系统源码中,比如
/vendor/rokid/sdk_v2/目录下,然后在此文件夹下添加如下 sdk_v2.mk ,同时按照以下步骤使sdk能够被系统编译到 - 在系统源码的
device/{platform}/{product}/*.mk最后(此mk文件可以在编译时被编译到) 中添加如下$(call inherit-product,vendor/rokid/sdk_v2/sdk_v2.mk) - 在 config 文件夹加下 添加
Android.mk文件 ,并添加如下内容LOCAL_PATH := $(call my-dir) $(shell mkdir -p $(TARGET_OUT)) $(shell cp -r $(LOCAL_PATH)/workdir_asr_cn $(TARGET_OUT)/) - 在 executable 文件夹 添加
Android.mk,并添加如下内容LOCAL_PATH := $(call my-dir) $(shell mkdir -p $(TARGET_OUT)/bin) $(shell cp $(LOCAL_PATH)/turenproc $(TARGET_OUT)/bin) - 在 shared-libraries 文件夹下添加
Android.mk,并添加如下内容LOCAL_PATH := $(call my-dir) ifeq ($(TARGET_ARCH),arm64) $(shell mkdir -p $(TARGET_OUT)/lib64) $(shell cp -r $(LOCAL_PATH)/arm64-v8a/* $(TARGET_OUT)/lib64) else $(shell mkdir -p $(TARGET_OUT)/lib) $(shell cp -r $(LOCAL_PATH)/armeabi-v7a/* $(TARGET_OUT)/lib) endif - 将预置到
system/bin/turenproc可执行进程加入到工程的init.*.rc中,使之能够以 root 权限在开机启动,示例如下:
其中 port 为启动 turenproc 进程启动时所依赖的运行端口号,比如:service turenproc /system/bin/turenproc <port> <deviceName> class main user root group root root30000,deviceName为对应平台的TARGET_DEVICE值,workdir_asr_cn文件夹中dnn.{deviceName}.cfg文件中的deviceName必须与之保持一致.比如deviceName为pebble,则需要如下方式启动service turenproc /system/bin/turenproc pebble class main user root group root root
预置注意事项
- 提供的
SystemVoiceDemo模块为一个Demo程序,此Demo模块的具体说明请参考SystemVoiceDemo说明. - 目前Android全链路前端语音识别部分仅支持32位
armeabi-v7aso文件输出,64位支持正在开发中,敬请期待.
接口调用说明
- 客户集成SDK时,对前端VoiceEvent/ASR/NLP等事件自行开发时,请参考Android全链路接口调用说明 以及Demo源码进行开发.
集成验证
验证集成结果
- 提供的
SystemVoiceDemoDemo 包含开机启动,如未能开机启动,请通过adb shell am startservice com.rokid.voicerec/.SpeechExecutor来启动Demo的service,然后通过Log查看是否有前端语音事件以及asr/nlp相关的log信息,如果有则证明集成OK.如果没有,请参考下边的集成注意事项或者联系我们.
集成注意事项
- 目前Android全链路前端语音识别部分仅支持32位armeabi-v7a so文件输出,64位支持正在开发中,敬请期待.
- 由于前端拾音模块需要读取Mic数据,因此各个客户/集成开发者需要在hal层实现mic设备的open以及read等接口,并以
"mic_array"为HAL_MODULE_INFO_SYM的 id.具体接口可参考mic_array集成说明,代码实现可参考 mic_array.c & mic_array.h 的实现(请右键另存为 将文件下载保存).目前支持的 mic 阵列数据采集格式至少为16K/16bit/单通道的数据格式.
1.1.6. 五、API参考
VoiceRecognize.jar中包含VoiceRecognize和VoiceRecognizeBuilder两个比较重要的类。 使用VoiceRecognizeBuilder设置Rokid账号信息就能得到一个VoiceRecognize对象,账号获取方式见创建设备流程。 下面详细介绍VoiceRecognize内部类和接口定义。
VoiceRecognize
方法预览
| 返回类型 | 返回值 | 方法 | 备注 |
|---|---|---|---|
| int | 成功返回0;失败返回-1 | control(Action action) | 控制语音激活 |
| int | 成功返回0;失败返回-1 | addVtWord(VtWord vtWord) | 添加激活词 |
| int | 成功返回0;失败返回-1 | remoteVtWord(String content) | 删除激活词 |
| ArrayList | 成功返回激活词集合;失败返回一个空的集合 | getVtWords() | 获取激活词 |
| int | 成功返回0;失败返回-1 | setSkillOption(String skillOption) | 同步客户端信息到云端 |
| int | 成功返回0;失败返回-1 | updateStack(String currAppId,String prevAppId) | 更新云端NLP栈信息 |
control(Action action)
方法说明
控制语音激活
参数说明
| 字段 | 类型 | 描述 |
|---|---|---|
| action | Action | 控制意图 |
返回说明
| 类型 | 描述 |
|---|---|
| int | 成功返回0;失败返回-1 |
addVtWord(VtWord vtWord)
方法说明
添加激活词
参数说明
| 字段 | 类型 | 描述 |
|---|---|---|
| vtWord | VtWord | 激活词信息 |
返回说明
| 类型 | 描述 |
|---|---|
| int | 成功返回0;失败返回-1 |
remoteVtWord(String content)
方法说明
删除激活词
参数说明
| 字段 | 类型 | 描述 |
|---|---|---|
| content | String | 需要删除的激活词utf-8字符串 |
返回说明
| 类型 | 描述 |
|---|---|
| int | 成功返回0;失败返回-1 |
getVtWords()
方法说明
获取激活词
返回说明
| 类型 | 描述 |
|---|---|
| ArrayList | 成功返回激活词集合;失败返回一个空的集合 |
setSkillOption(String skillOption)
方法说明
同步客户端信息到云端
参数说明
| 字段 | 类型 | 描述 |
|---|---|---|
| skillOption | String | 当前skill运行状态信息 |
返回说明
| 类型 | 描述 |
|---|---|
| int | 成功返回0;失败返回-1 |
updateStack(String currAppId,String prevAppId)
方法说明
更新云端NLP栈信息
参数说明
| 字段 | 类型 | 描述 |
|---|---|---|
| currAppId | String | 执行当前语音命令的应用AppId |
| prevAppId | String | 执行上一条语音命令的应用AppId |
返回说明
| 类型 | 描述 |
|---|---|
| int | 成功返回0;失败返回-1 |
内部类
| 类型 | 名称 | 描述 |
|---|---|---|
| enum | Action | 语音控制意图枚举定义:ACTION_SET_STATE_AWAKE 设置当前从休眠状态进入激活状态,此时不用说激活词直接语音命令即可,也可以通过说休眠词进入休眠状态ACTION_SET_STATE_SLEEP 设置当前从激活状态进入休眠状态,此时可以通过唤醒词再次进入激活状态ACTION_OPEN_MIC 打开麦克风,此时可以通过唤醒词进入激活状态ACTION_CLOSE_MIC 关闭麦克风,需要打开麦克风才能通过唤醒词唤醒 |
| enum | Event | 语音唤醒事件枚举定义:EVENT_VOICE_COMING 激活即将开始EVENT_VOICE_LOCAL_WAKE 本地已经激活EVENT_VOICE_START 开始上传VADEVENT_VOICE_NONE 二次确认结果为空,只出于已经在激活状态下,直接说语音命令EVENT_VOICE_ACCEPT 云端二次确认通过EVENT_VOICE_REJECT 云端二次确认不通过EVENT_VOICE_CANCEL 取消当前上传VADEVENT_VOICE_LOCAL_SLEEP 通过休眠词从激活状态进入休眠状态 |
| class | VtWord | 激活词信息:type 激活词类型,word激活词中文字符表示形式,pinyin激活词拼音字符+音调表示形式(例:若琪 ruo4qi2,ruo为四声,qi为二声) |
| enum | Type | 激活词类型枚举定义:AWAKE唤醒词,SLEEP休眠词,HOTWORD热词,OTHER保留 |
| interface | Callback | 接收识别结果的回调接口定义,详细介绍见第3节Callback接口说明 |
回调接口
VoiceRecognize.Callback
| 返回类型 | 方法 | 备注 |
|---|---|---|
| void | onVoiceEvent(int id,Event event,float sl,float energy) | 语音事件回调接口 |
| void | onIntermediateResult(int id,String asr,boolean isFinal) | 语音识别中间结果,可能回调多次 |
| void | onRecognizeResult(int id,String nlp,String action) | 最终语音识别回调接口 |
| void | onException(int id,int errCode) | 语音识别出错 |
onVoiceEvent(intid,Event event,float sl,float energy))
方法说明
语音事件回调接口
参数说明
| 字段 | 类型 | 描述 |
|---|---|---|
| id | int | voiceEvent的会话id,在EVENT_VOICE_COMING/EVENT_VOICE_LOCAL_WAKE时还没有生成id,此时为-1,其他voiceEvent事件时为>=0的int值 |
| event | Event | 语音事件 |
| sl | float | 当前唤醒角度(0到360度之间) |
| energy | float | 当前说话能量值(0到1之间的浮点数) |
onIntermediateResult(int id,String asr,boolean isFinal)
方法说明
语音识别中间结果,可能回调多次
参数说明
| 字段 | 类型 | 描述 |
|---|---|---|
| id | int | asr事件id,与onVoiceEvent获取到有效id一一对应,可以用来判断事件回调是否属于同一次会话 |
| asr | String | 语音转文字结果 |
| isFinal | boolean | 是否是最终完整的语音转文字结果 |
onRecognizeResult(int id,String nlp,String action)
方法说明
最终语音识别回调接口
参数说明
| 字段 | 类型 | 描述 |
|---|---|---|
| id | int | nlp事件id,与onVoiceEvent获取到有效id一一对应,可以用来判断事件回调是否属于同一次会话 |
| nlp | String | 自然语义解析结果 |
| action | String | 云端skill结果 |
onException(int id,int errCode)
方法说明
语音识别出错
参数说明
| 字段 | 类型 | 描述 |
|---|---|---|
| id | int | error事件id,与onVoiceEvent获取到有效id一一对应,可以用来判断事件回调是否属于同一次会话 |
| errCode | int | 错误码 |
错误码说明
| 值 | 错误描述 |
|---|---|
| 0 | 成功 |
| 3 | 与服务器连接数量过多 |
| 4 | 服务器资源不足 |
| 5 | 服务器忙 |
| 6 | 服务器内部错误 |
| 7 | 语音识别超时 |
| 101 | 无法连接到服务器 |
| 103 | 语音请求服务器超时未响应 |
| 104 | 未知错误 |
示例代码
import android.util.Log;
import com.rokid.voicerec.VoiceRecognize;
import com.rokid.voicerec.VoiceRecognizeBuilder;
public class MainService extends android.app.Service implements VoiceRecognize.Callback{
private String TAG = getClass().getSimpleName();
private VoiceRecognize mVoiceRecognize = null;
@Override
public void onCreate(){
VoiceRecognizeBuilder builder = new VoiceRecognizeBuilder();
mVoiceRecognize = builder.setHost("apigwws.open.rokid.com")
.setPort(443)
.setBranch("/api")
.setKey("your key")
.setSecret("your secret")
.setDeviceTypeId("your device_type_id")
.setDeviceId("your device_id")
.setCallback(this)
.build();
//mVoiceRecognize.control(VoiceRecognize.Action.ACTION_OPEN_MIC);
}
@Override
public void onVoiceEvent(int id,VoiceRecognize.Event event, float sl, float energy) {
Log.d(TAG, "onVoiceEvent id" + id + ", event " + event + ", sl " + sl + ", energy " + energy);
}
@Override
public void onIntermediateResult(int id, String asr, boolean isFinal) {
Log.d(TAG, "onIntermediateResul id" + id + ", asr " + asr);
}
@Override
public void onRecognizeResult(int id, String nlp, String action) {
Log.d(TAG, "onRecognizeResult id" + id + ", nlp " + nlp + ", action " + action);
}
@Override
public void onException(int id, int errCode) {
Log.d(TAG, "onException id" + id + ", errCode " + errCode);
}
@Override
public android.os.IBinder onBind(android.content.Intent intent) {
return null;
}
}