《opencv》专题
-
 在Python OpenCV中检测线而不应用高斯模糊
在Python OpenCV中检测线而不应用高斯模糊我在一个无噪音的程序生成的png文件中检测线条。我通常会使用Hough线,这要求我首先提供canny检测的边缘,但canny检测的第一步是应用高斯模糊来消除噪声。有没有一种方法可以在我的原始图像上进行边缘检测,而不会故意使其模糊?我怀疑这将产生更好的结果比毛刺第一,因为线已经完全干净和高对比度。 下面是一个使用canny检测和图像的简单示例。每组中的行从5像素宽开始,然后下一行是4,然后是3、2和
-
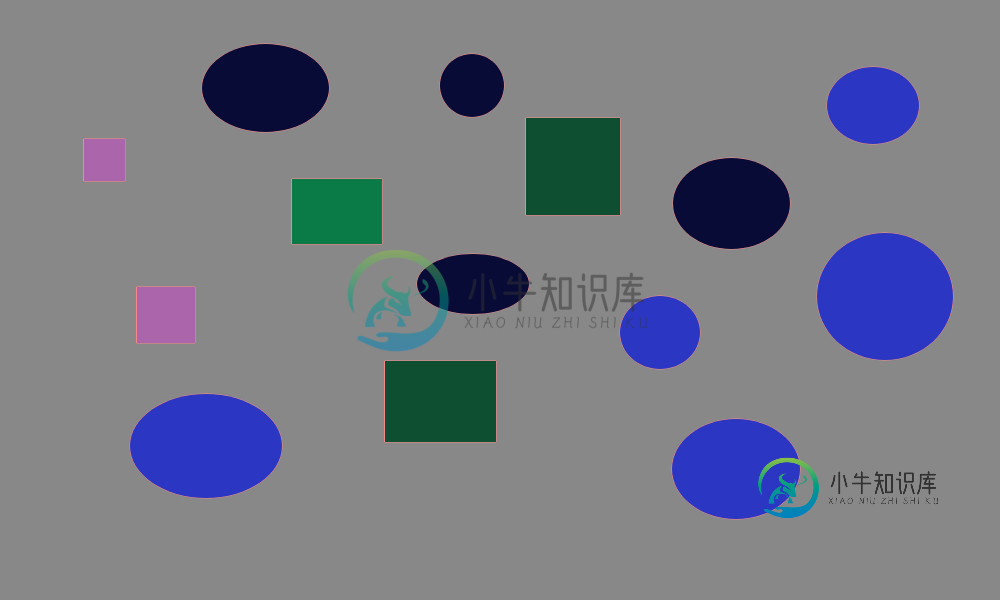 opencv检测表(birdview)上的所有通用对象形状
opencv检测表(birdview)上的所有通用对象形状我想检测平桌上的各种物体形状。桌子的表面颜色可以是灰色、白色或黑色。 对象可以是任何形状,也可以有不同的颜色。 解决这个问题的有效方法是什么? 我曾经尝试过: 1.)转换为灰度,双边滤波,精明的边缘,然后使用findContour,也尝试了自适应阈值。 2.)OpenCV SimpleBloDetector 原始图片 轮廓 水滴探测器
-
在Raspbian Stretch的raspberry pi 3上安装opencv-python
如上所述,尝试安装开放蟒蛇。 通常这将是一个简单的,但它似乎不起作用。相反,opencv安装到minicon da目录 而不是全局 尝试通过应用程序在荆棘中添加失败。在蟒蛇程序中... 结果为 我也尝试过将其添加到路径(),但运气不好。
-
在android studio中使用OpenCV进行人脸检测。E/AndroidRuntime:致命异常:main
我正在用OpenCV做人脸检测的应用程序。应用程序安装在手机里,但是由于致命的错误,它突然关闭了。这是我的主要活动。java 这是我的错误,有人能帮忙吗? 如果有人能给出解决错误的步骤,这将是非常有帮助的。
-
 opencv通过拉伸关键点对齐两个图像
opencv通过拉伸关键点对齐两个图像我有两张照片 图像1(对象): 没有标记关键点的原始图像: 图2为白色图片(500x500) 在图1和图2中,我标记了关键点。我想按关键点对齐图像2上的图像1。因此,目标是使两个关键点与拉伸、缩放和变换图像重叠2。 这是我的关键点(csv文件)。图像1中的图像1和图像2的坐标是x和y。 如何使用opencv和python实现这一点?因此,结果图像应如下所示(没有红点,红点仅用于演示关键点):
-
OpenCV模板匹配算法的改进
我正在进行一个小型的个人项目,我必须知道所显示的图像是否是一辆汽车。我使用的是基本的基于OpenCV python的模板匹配。 汽车俯视图:-https://i.stack.imgur.com/zXr1U.jpg 简单的模板匹配是使用一个正图像对另一个正图像进行匹配,从而得到所需的结果。 但是当我们使用像https://i.stack.imgur.com/YLVwc.jpg这样的负面图像时,模板查
-
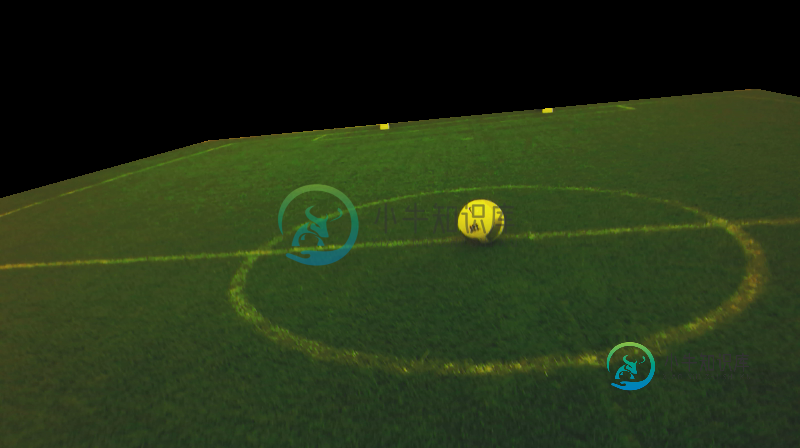 如何使用OpenCV检测足球场中的线条
如何使用OpenCV检测足球场中的线条我使用Canny来检测边缘,然后Hough Lines转换以获得线条,我想我找不到适合我使用的正确参数。 你知道我该如何改进线路检测,最终只得到几条线路吗?
-
运行cv2时Emacs中的python opencv错误。精明的
我在使用OpenCV的cv2时遇到了一个非常奇怪的问题。Emacs中python shell中的Canny()函数。当我运行,我收到了错误消息 OpenCV错误:CV::Canny文件D:\Build\OpenCV\OpenCV-3.2.0\modules\imgproc\src\Canny中的断言失败(深度==cv8u)。cpp,第845行回溯(最后一次调用):文件“”,第1行,文件“./mys
-
 Opencv HoughLinesθ?
Opencv HoughLinesθ?我有一个关于HoughLines的opencv图书馆的问题。格式如下官网链接: C:void HoughLines(输入阵列图像、输出阵列线、双菱形、双θ、整数阈值、双srn=0、双stn=0) 以及线的输出数组参数的说明,它表示: 线-线的输出矢量。每条线都由一个双元素向量表示:rho和θ。对于垂直线,θ是0,对于水平线,θ/2(辐射度)。 谁能告诉我线输出θ的规律性是什么? 非常感谢!
-
OpenCV断言失败错误:(-215)scn==3||scn==4在函数cv::cvtColor作品ALTERNATE次
我是Python和OpenCV的初学者。我正在尝试一段代码,它从网络摄像头获取输入图像。下面是一段代码。 我同时使用Python2.7和Python3.4来执行此操作。在这两方面,我都面临一个奇怪的问题。代码给出了如下断言错误 OpenCV错误:cv::cvtColor,文件中的断言失败(scn==3 | | scn==4)。。。。。。。。\opencv\modules\imgproc\src\c
-
删除OpenCV中未使用的形状
我已经用python中的OpenCV进行了形状检测,螺栓和螺母。我拍了一张照片,做了二值化,然后检测边缘。现在,由于灰尘和污垢,白色区域总是颗粒状的。我的检测使用最大的区域作为零件,这非常有效。但我如何才能删除由灰尘造成的数千个对象?简言之:我想将数组中的形状清除为最大的形状,以便进一步处理。
-
无法使用findcontours和opencv查找所有轮廓
我试图找到使用opencv findcontour的轮廓,但一些轮廓丢失了一个相当简单的图像。图像是在create_mat()函数中创建的,在rbt中使用findcontour。我曾尝试改变模式findcontour使用:CV_RETR_EXTERNAL,CV_RETR_LIST...我都试过了,改变方法:CV_CHAIN_APPROX_NONE...... opencv版本是3.3 我也尝试过先
-
 检测纸上的黑色墨水斑点-OpenCV Android
检测纸上的黑色墨水斑点-OpenCV Android我是openCV的新手,我一直在学习为Android提供的示例。 我的目标是检测颜色斑点,所以我从颜色斑点检测样本开始。 我将彩色图像转换为灰度,然后使用二值阈值进行阈值化。 背景是白色的,斑点是黑色的。我想探测那些黑色斑点。此外,我想画他们的彩色轮廓,但我不能这样做,因为图像是黑白的。 我已经设法在灰度中完成了这一点,但我不喜欢轮廓的绘制方式,这就像颜色容差太高,轮廓比实际的斑点大(可能斑点太小
-
检测到的Opencv轮廓中断
我正在使用openCV检测图像中的矩形。在许多例子中,我使用阈值findContour约PolyDP。 如下图所示,我的问题是findContours找到的轮廓无法继续,因此在approxPolyDP之后,我无法获得矩形。。。 那么,你知道如何解决这个问题吗?谢谢你。:) 另一个问题:为什么轮廓是灰色的?在阈值之后,应该只有白色和黑色,不是吗? 轮廓 经批准
-
opencv结构化森林边缘检测和findcontours
我试图使用opencv通过可视c提取图像的轮廓。我能够做到这一点,使用opencv教程的findcontoursfindcontoursworks工作在两个步骤 使用canny边缘检测器检测边缘 将canny的输出馈送给findcontours 我想用“结构化森林边缘检测”(Zitnick等人)来尝试同样的方法。我能够提取边缘并显示它们,但当我尝试将输出馈送给FindOntours时。我收到一个“