《感知算法实习》专题
-
 自动驾驶 感知算法面经 - 1
自动驾驶 感知算法面经 - 1公zhong号 : 内推君SIR , 聚焦 自动驾驶、汽车、芯片、机器人等高科技行业, 实习、校招、社招,技术发展,行业动态。 内推 :小马,文远,图森,Autox ,元戎,Momenta,智加,极智嘉 ,大疆,蔚来,小鹏,理想,百度,美团,阿里,字节,小米,海康,高仙,英伟达NVIDIA,一汽,上汽,吉利 Case 1 1、有DaSiamRPN,SiamRPN++相比于SiamRPN的改
-
 速腾聚创感知算法-许愿offer
速腾聚创感知算法-许愿offer速腾是目前我秋招进度最快,效率最高的,也是意愿最高,最想去的。 timeline: 0806 - 投递 然后笔试 编程ak 八月底 一面 项目介绍+leetcode手撕1道 ac 40分钟 五天后 二面 leetcode手撕2道 ak 30分钟 三天后 主管面 深挖项目,追问细节,问的很详细,也有很激烈的讨论(刚好我做的工作主管之前也接触过 有独特的理解)。然后介绍部门和业务以及闲聊职业发展等等,
-
 元戎启行 一面 感知算法岗
元戎启行 一面 感知算法岗本来以为会主要问检测跟踪相关的,还好,后来反问的时候问了一下主要是想用生成模型来生成图片或者数据这些然后就主要还是问的实习经历 1.自我介绍 2.商品换背景的时候如何解决和边缘的融合问题,给出她们那边的场景是红绿灯,固定红绿灯的话生成图整个画面非常不和谐 如何解决 3.百度实习,人像相关生成,主要解决的是什么问题 4.adetailer使用如何实现增大与用户相似度 5.删除链表中重复元素 想不太起
-
 文远知行25届面试 感知算法 一二面
文远知行25届面试 感知算法 一二面首先感谢文远知行的认可,没有笔试直接提前一两周进入面试流程当时还特地问了HR我这流程是否规范,得到肯定答复并被告知简历相关度高会免笔试,冲这点文远是真的看得起本菜鸡,不得不夸 一面: 问项目,问实习经历 蔚来实习这段问得很细,基本就是整个项目打碎一块一块问;Momenta的实习因为描述得比较详细所以没怎么再深入提问 手撕:线段求交点 写得一般,有点混乱,被问到是否可以减少拷贝复制,赶紧回答自定的s
-
 旷世感知视觉算法一面凉经
旷世感知视觉算法一面凉经投的AI嵌入式开发,被视觉感知算法捞了,方向不匹配导致异常尴尬,一问三不知 1.自我介绍 2.部署概念 3.BEV编码方法? 4.2D目标检测了解吗?(不会) 5.Label 正负样本匹配?(瞎扯一通) 6.具体实现?(不会) 7.NMS如何实现? 8.基于Transformer的检测方法?(不会) 9.点云三维目标检测的backbone?(PointNet,3D Sparse Conv) 10.
-
 轻舟智航 感知融合算法面经
轻舟智航 感知融合算法面经终于有些对口的了,不容易 —————————————— 8.16一面 介绍一下蔚来实习的项目,讲了大概20min的项目,面试官说我做的东西挺多的。 没有八股,直接开始coding,本来问我概率论学的怎么样,我说考研学过一些,面试官说不出那么难吧,然后出了一道岛屿数量,5min就a了。 如果他们有hc的话应该能过吧,面试官说保持联系。许愿过一个,鼠鼠秋招还从没过过一面的呢 #自动驾驶# #秋招# #
-
感知
1. 光线传感器(板载)光线强度 报告指定光线传感器检测到的光线强度。 示例: 按下空格键,板载光线传感器检测到的光线强度会显示在 mBot 的外接表情面板。 2. 超声波传感器(接口3)距离 cm 报告指定超声波传感器检测到的障碍物距离(cm)。 示例: 按下空格键,接口3连接的超声波传感器检测到的障碍物距离会显示在 mBot 的外接表情面板。 3. 巡线传感器(接口2)读数 报告指定巡线传感器
-
感知
该部分 API 将帮助您使用光环上的各类传感器的状态值,包含按钮、麦克风、加速度计、陀螺仪以及四个触摸点。 省略代码中的halocode 注意:该部分 API 省略了“halocode.”,本篇提及的所有 API 均省略了“halocode.” ,如 led_driver.off( )实际为halocode.led_driver.off()。mBuild 电子模块平台的所有功能均维护在haloco
-
 九识智能-感知算法工程师面经
九识智能-感知算法工程师面经大概率挂了,问的问题不难但是我一个Python选手c++懂得确实不多,发个面经赞赞人品 1.拷打项目 因为项目里有提到ssd yolo和pointnet 就询问了怎么做的调整,使用过程中遇到了哪些问题,怎么解决的,然后问有没有了解过别的目标追踪网络,还有点云网络pointpillar (其实了解过,工业上用的比较多,但是一紧张忘记了) 2.八股 Python字典的key可以用哪些数据类型✓ 为什
-
 小米未来星感知融合算法二面
小米未来星感知融合算法二面coding面 第一题给一个数组,和一个k,问乘积小于k的子数组有多少个 第二题是设计一个优先队列,实现top,pop,push,clear的功能 写的没那么顺不过最后都调通了,手撕真容易边边角角地方写错一点 #小米求职进展汇总#
-
 小米未来星感知融合算法面经
小米未来星感知融合算法面经之前随手一投,没想到能约面,约了就得好好和大佬交流学习一下了 ------------------------------------------------- 9.3日一面 面试官感觉像某个大佬,一开始问几段实习的项目,感觉面试官水平真的很高。 上来就看出来我简历里面写错了一个单词,很尴尬。 车道线检测的输入形式是什么样的? 车道线给下游用的形式是怎么样的? 为什么不采用三次曲线拟合,采用点链的
-
感知类
小程 小奔 – 颜色红外传感器 1. 按钮()被按下? 如果小程指定的按钮被按下,报告条件成立。按钮包含A、B、C三个选项,默认为按钮A。 示例: 小程启动后,如果按钮A被按下,屏幕显示“Yes”,否则显示“No”。 2. 小程接入小奔? 如果小程与小奔组合在一起,报告条件成立。 示例: 小程启动后,如果小程与小奔组合在一起,屏幕显示“Yes”,否则显示“No”。 3. 齿轮电位器读数 报告小程齿
-
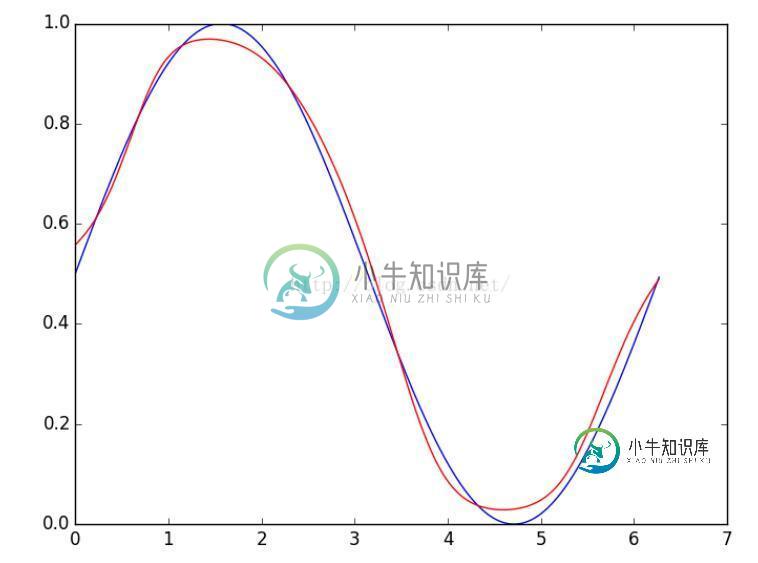 python实现多层感知器
python实现多层感知器本文向大家介绍python实现多层感知器,包括了python实现多层感知器的使用技巧和注意事项,需要的朋友参考一下 写了个多层感知器,用bp梯度下降更新,拟合正弦曲线,效果凑合。 效果图: 以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持呐喊教程。
-
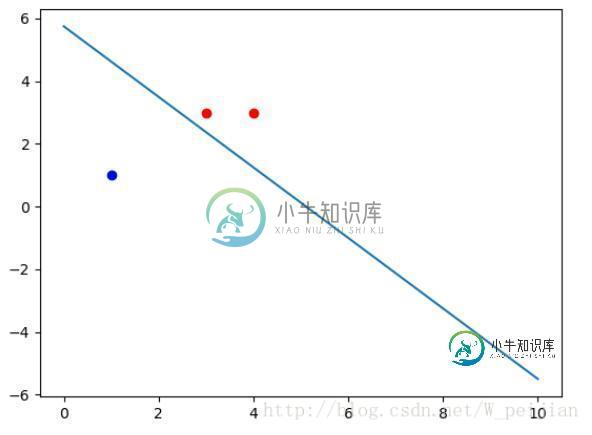 python感知机实现代码
python感知机实现代码本文向大家介绍python感知机实现代码,包括了python感知机实现代码的使用技巧和注意事项,需要的朋友参考一下 本文实例为大家分享了python感知机实现的具体代码,供大家参考,具体内容如下 一、实现例子 李航《统计学方法》p29 例2.1 正例:x1=(3,3), x2=(4,3), 负例:x3=(1,1) 二、最终效果 三、代码实现 以上就是本文的全部内容,希望对大家的学习有所帮助,也希望
-
 新石器无人车-秋招感知算法面经(offer)
新石器无人车-秋招感知算法面经(offer)一面 问实习+科研 车道线检测的正负样本匹配方法 车道线检测的anchor-based方法的baseline是怎么做的 (LineCNN:从最底下的点发射出去,寻找线的proposal,需要最底下点的坐标以及三个边界的值,相对于RCNN的滑动窗口要快和轻便很多) 小目标检测有什么自己的思考 车道线检测任务的nms跟传统检测的nms有什么区别 手撕:找到第k大的数字快排,返回第-k个优化:找到第k个