
感知
1. 光线传感器(板载)光线强度
报告指定光线传感器检测到的光线强度。

示例:
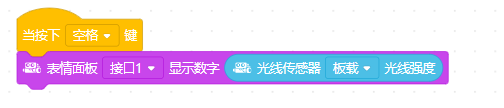
按下空格键,板载光线传感器检测到的光线强度会显示在 mBot 的外接表情面板。
2. 超声波传感器(接口3)距离 cm
报告指定超声波传感器检测到的障碍物距离(cm)。

示例:
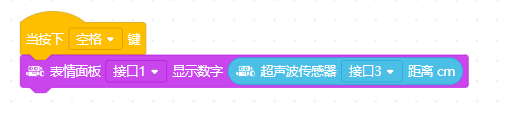
按下空格键,接口3连接的超声波传感器检测到的障碍物距离会显示在 mBot 的外接表情面板。
3. 巡线传感器(接口2)读数
报告指定巡线传感器的读数。

示例:

按下空格键,接口2连接的巡线传感器读数会显示在 mBot 的外接表情面板。
4. 巡线传感器(接口2)检测到(左边)为(黑)?
如果指定巡线传感器在指定方向检测到的物体为指定颜色,报告条件成立。

示例:

点击绿色旗帜运行程序,如果 mBot 接口2连接的巡线传感器检测到左边的障碍物为黑色,mBot 就会停止运动。
5. 板载按钮(已按下)?
如果 mBot 的板载按钮以被按下,报告条件成立。

示例:
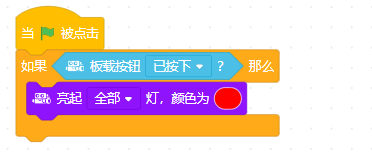
点击绿色旗帜运行程序,如果 mBot 的板载按钮被按下,所有LED灯会亮起红色。
6. 红外遥控器按下(A)?
如果红外遥控器的指定按钮被按下,报告条件成立。

示例:
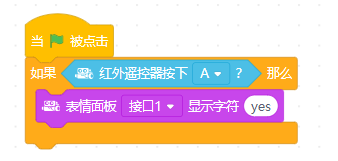
点击绿色旗帜运行程序,如果红外遥控器的按钮A被按下,mBot 的外接表情面板会显示“yes”。
7. 发送红外消息()
发送指定红外消息。
示例:

按下空格键,mBot 会发送红外消息“hello”。
8. 接收到的红外消息
报告接收到的红外消息。

示例:

按下空格键,mBot 接收到的红外消息会显示在外接表情面板上。
9. 计时器
报告计时器的值。

示例:

按下空格键,mBot 计时器的值会显示在外接表情面板上。
10. 计时器归零
将 mBot 的计时器归零。
示例:

按下空格键,mBot 的计时器会被重置。