《感知算法实习》专题
-
 momenta感知算法岗实习面经
momenta感知算法岗实习面经一面:上来面试官就先介绍工作内容,询问是否接受。然后就是自我介绍,介绍完之后面试官会就简历内容提问,提问内容都是比较贴合实际场景。最后就是coding,我抽到的是求点到直线的距离点排序。最后就是反问,具体的实习工作内容,全程时长1h左右。 一面整体感觉还是有点难度的,特别是coding部分对数学知识要求较高(可能是leetcode刷的不够多,太菜了) 二面:一面结束后两个工作日进行二面。二面主管面
-
感知机学习算法
感知机学习问题转化为求解损失函数的最优化问题,最优化的方法就是随机梯度下降法。 1. 学习算法的原始形式 给定一个训练数据集$$T={(x{(1)},y{(1)}),(x{(2)},y{(2)}),...,(x{(m)},y{(m)})}$$,其中,$$x{(i)}in X= Rn$$,$$y^{(i)}in Y=lbrace+1,-1rbrace$$,$$i=1,2,...,m$$,求参数$$w
-
 小米感知算法实习生 一面
小米感知算法实习生 一面1. 介绍项目 2. imu怎么加入到vo 3. imu加进去对定位精度的提升 4. 平面拟合,有斜坡怎么处理 5. 激光雷达和相机结合进行三维重建的具体步骤 6. 了解过滤波吗,说说kf,ekf,ukf 7. ekf中传感器噪声和测量噪声的大小,对滤波过程的影响,两者太大,分别会造成什么问题 8. 了解过什么运动模型,没明白意思,面试官举了一个横向运动的例子 9. 智能指针,讲一讲 10. 引用
-
 python实现感知器算法详解
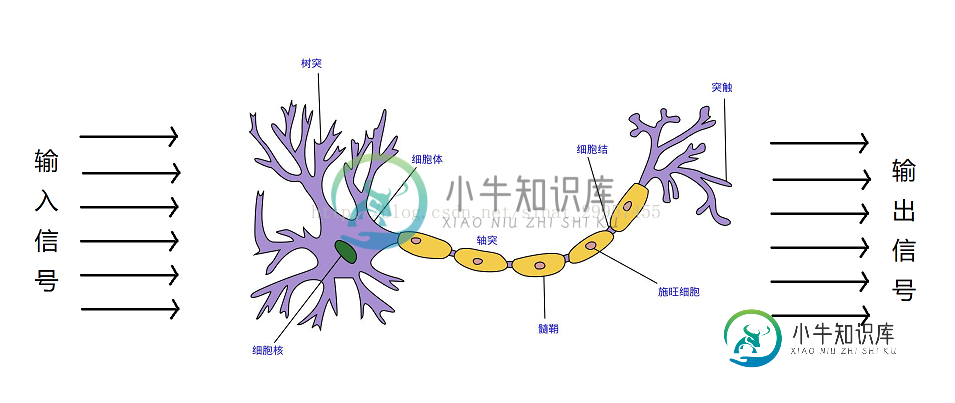
python实现感知器算法详解本文向大家介绍python实现感知器算法详解,包括了python实现感知器算法详解的使用技巧和注意事项,需要的朋友参考一下 在1943年,沃伦麦卡洛可与沃尔特皮茨提出了第一个脑神经元的抽象模型,简称麦卡洛可-皮茨神经元(McCullock-Pitts neuron)简称MCP,大脑神经元的结构如下图。麦卡洛可和皮茨将神经细胞描述为一个具备二进制输出的逻辑门。树突接收多个输入信号,当输入信号累加超过
-
 python实现感知器算法(批处理)
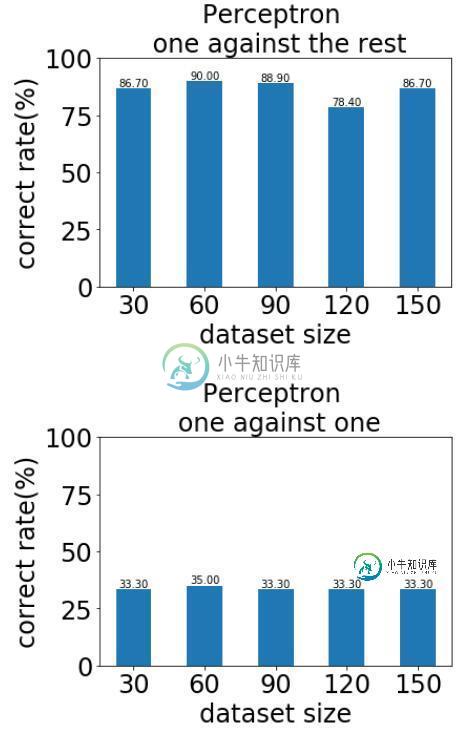
python实现感知器算法(批处理)本文向大家介绍python实现感知器算法(批处理),包括了python实现感知器算法(批处理)的使用技巧和注意事项,需要的朋友参考一下 本文实例为大家分享了Python感知器算法实现的具体代码,供大家参考,具体内容如下 先创建感知器类:用于二分类 然后为Iris数据集创建一个Iris类,用于产生5折验证所需要的数据,并且能产生不同样本数量的数据集。 然后我们进行训练测试,先使用one agains
-
 旷视感知算法面经
旷视感知算法面经项目相关问了40分钟左右,对模型的具体实现和验证非常感兴趣,论文要求详细讲解创新点,不过问的问题都比较常规,也没有问八股 手撕代码是三道题 链表中环的入口节点 快慢指针,同时从head出发,fast走两步,slow走一步,第一次相遇后把fast放到开始,步长改成1,下次相遇就是入口结点 打家劫舍2(首尾相连) 首尾相连的情况下,首尾不能同时取,所以直接对nums[:n-1]和nums[1:]分别动
-
 蔚来感知算法凉经
蔚来感知算法凉经1、自我介绍 2、两个科研项目的深度拷打 3、手撕一道力扣原题,无重叠区间。(没a出来,痛苦!)面试管人很好,给我一些引导,但是思考太久了就结束了。 一开始用C++写,发现sort算法的第三个参数写不出来,太不熟练了。然后换python,写出来一半 4、反问 5、问问能实习多久,想不想转正 下周出结果,要是能做出来机会就大一些了,奈何自己不争气,刷题太少了,痛失珍贵的机会。后面把时间都用来刷题吧
-
 旷视自驾感知算法暑期实习面试
旷视自驾感知算法暑期实习面试1.问下项目,问下我的情况 2.是否了解最新的BEV算法,讲一下 3.是否了解三维重建 4.考察相机坐标系的转换 5.手撕代码,翻车了,不考leetcode,考察两个旋转框的IOU box1 = [xmin1, ymin1, xmax1, ymax1, theta1] box2 = [xmin2, ymin2, xmax2, ymax2, theta2] 好复杂,只能说思路,没时间写 讨论每一种交
-
机器学习:感知机算法(PLA)
感知机可以理解为几何中的线性方程:w*x+b=0 对应于特征空间 R^n 中的一个超平面 S ,其中 w 是超平面法向量,b 是超平面的截距。这个超平面将特征空间划分为两个部分。位于两部分的点(特征向量)分别被分为正、负两类。
-
 实习-蔚来-感知算法实习生-面经攒人品
实习-蔚来-感知算法实习生-面经攒人品#我的实习求职记录# 渠道:boss 轮次:4轮面试 原因:毁约极氪后不让实习了,又想学点新东西,所以秋招结束后找个实习。 ①面试第一轮(1h) 自我介绍 过往实习项目介绍 介绍CUDA编程,CUDA内存模型 智能指针介绍、shared_ptr的优缺点(性能劣势) static_cast dynamic_cast区别 常用Linux命令(grep) git rebase和git merge 代码题
-
 0822旷视感知算法一面
0822旷视感知算法一面1. 自我介绍 2. 介绍实习项目 3. yolov5的改进,介绍mosaic增强,mosaic增强是否随机(没看过代码,不清楚),正负样本匹配策略 4. 关于口罩人脸识别的一些探讨 5. 实现三个函数 ,分别是求iou, focal loss,roi pool 6. 反问 #校招# #旷视#
-
 2023暑期实习-旷视融合感知算法面经
2023暑期实习-旷视融合感知算法面经这个岗位主要是基于3D的数据做一些自动驾驶场景的一些检测任务,在实验室2D相关的,之前比较缺乏3D检测的相关知识,所以面试整体感觉不是很match 介绍之前的实习工作,遇到了哪些困难,怎么解决的(可能是从中想挖掘一些点来问) 有没有了解过一些学术上的多loss平衡的策略(无,只靠手动调参) 介绍一下基于视觉方案的自动驾驶检测框架 介绍一下学术上比较新的文献(最近都在刷leetcode,说的也不是很
-
 图森未来-感知算法面经
图森未来-感知算法面经4月12日(一面 50min) 个人项目30min C++新特性,左值右值,智能指针 堆和栈的区别 死锁原因和必要条件以及死锁的解除方式 4月18(二面1个半小时) 编程题一:数组内连续子数组大于指定数的个数 编程题二:滑动窗口的众数滤波器。 unordered map和map的区别以及其实现原理 C++打印vector的方式。(因为我编程时用到了这些内容,就问了这些) 动态链接和静态链接的区别
-
 吉利汽车 感知算法 一面
吉利汽车 感知算法 一面国庆节当天晚上的面试,三个面试官,汗流浃背了(鼠鼠第一次面对这么多人).... 1.自我介绍 2.深挖项目 3.部门是做自动驾驶的,问了一些场景题 1)鬼影现象 2)3D检测中,回归出一个车的size,你认为哪些东西是最重要的? 3)DOTA数据集 4)介绍一下nms iou 5)iou中的分子分母分别是什么?交集是哪两个框? 6)map是什么?和ap的区别是什么?召回率怎么计算? 4.手撕:给了
-
 蔚来感知算法实习一面面经+二面面经
蔚来感知算法实习一面面经+二面面经1.手写nms,面试官本来要求用C++,我说不太会就改为用python了 2.深挖八股,第一面不聊项目和简历 从模型和数据的角度分别说一下如何解决梯度爆炸的问题? 更了解fasterrcnn还是yolo?能否大概说一下fasterrcnn的流程,两阶段主要解决了什么问题? 延伸,yolo中是怎么解决正负样本不均衡问题的?yolo中的object分支有什么作用 BN层的作用是什么,有什么可学习参数?