
Dijkstra的邻接表表示算法
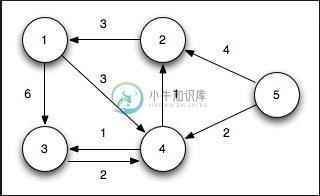
有一个给定的图G(V,E)及其邻接列表表示形式,并且还提供了一个源顶点。Dijkstra的算法,用于找到源顶点与图G的任何其他顶点之间的最小最短路径。
为了解决这个问题,我们将使用两个列表。一种是存储已被视为最短路径树的顶点,另一种将保存尚未被考虑的顶点。在算法的每个阶段,我们都找到未考虑的顶点,并且顶点与源的距离最小。
另一个列表用于保存前任节点。使用先前节点,我们可以找到从源到目标的路径。
Dijkstra最短路径算法的复杂度为O(E log V),因为该图是使用邻接表表示的。这里E是边数,V是顶点数。
输入输出
Input: The adjacency list of the graph with the cost of each edge.Output: 0 to 1, Cost: 3 Previous: 0 0 to 2, Cost: 5 Previous: 1 0 to 3, Cost: 4 Previous: 1 0 to 4, Cost: 6 Previous: 3 0 to 5, Cost: 7 Previous: 2 0 to 6, Cost: 7 Previous: 4
算法
dijkstraShortestPath(g : Graph, dist, prev, start : node)
输入-图形g,用于存储距离的dist列表,先前节点的prev列表以及起始顶点。
输出- 从起点到所有其他顶点的最短路径。
Begin for all vertices u in (V - start) do dist[u] := ∞ prev[u] := φ done set dist[start] = 0 and prev[start] := φ for all node u in V do insert u into queue ‘Q’. done while Q is not empty do u := minimum element from Queue delete u from Q insert u into set S for each node v adjacent with node u do if dist[u]+cost(v) < dist[v] then dist[v] := dist[u]+cost(v) prev[v] := u done done End
示例
#include<iostream> #include<set> #include<list> #include<algorithm> using namespace std; typedef struct nodes { int dest; int cost; }node; class Graph { int n; list<node> *adjList; private: void showList(int src, list<node> lt) { list<node> :: iterator i; node tempNode; for(i = lt.begin(); i != lt.end(); i++) { tempNode = *i; cout << "(" << src << ")---("<<tempNode.dest << "|"<<tempNode.cost<<") "; } cout << endl; } public: Graph() { n = 0; } Graph(int nodeCount) { n = nodeCount; adjList = new list<node>[n]; } void addEdge(int source, int dest, int cost) { node newNode; newNode.dest = dest; newNode.cost = cost; adjList[source].push_back(newNode); } void displayEdges() { for(int i = 0; i<n; i++) { list<node> tempList = adjList[i]; showList(i, tempList); } } friend void dijkstra(Graph g, int *dist, int *prev, int start); }; void dijkstra(Graph g, int *dist, int *prev, int start) { int n = g.n; for(int u = 0; u<n; u++) { dist[u] = 9999; //set as infinity prev[u] = -1; //undefined previous } dist[start] = 0; //distance of start is 0 set<int> S; //create empty set S list<int> Q; for(int u = 0; u<n; u++) { Q.push_back(u); //add each node into queue } while(!Q.empty()) { list<int> :: iterator i; i = min_element(Q.begin(), Q.end()); int u = *i; //the minimum element from queue Q.remove(u); S.insert(u); //add u in the set list<node> :: iterator it; for(it = g.adjList[u].begin(); it != g.adjList[u].end();it++) { if((dist[u]+(it->cost)) < dist[it->dest]) { //relax (u,v) dist[it->dest] = (dist[u]+(it->cost)); prev[it->dest] = u; } } } } main() { int n = 7; Graph g(n); int dist[n], prev[n]; int start = 0; g.addEdge(0, 1, 3); g.addEdge(0, 2, 6); g.addEdge(1, 0, 3); g.addEdge(1, 2, 2); g.addEdge(1, 3, 1); g.addEdge(2, 1, 6); g.addEdge(2, 1, 2); g.addEdge(2, 3, 1); g.addEdge(2, 4, 4); g.addEdge(2, 5, 2); g.addEdge(3, 1, 1); g.addEdge(3, 2, 1); g.addEdge(3, 4, 2); g.addEdge(3, 6, 4); g.addEdge(4, 2, 4); g.addEdge(4, 3, 2); g.addEdge(4, 5, 2); g.addEdge(4, 6, 1); g.addEdge(5, 2, 2); g.addEdge(5, 4, 2); g.addEdge(5, 6, 1); g.addEdge(6, 3, 4); g.addEdge(6, 4, 1); g.addEdge(6, 5, 1); dijkstra(g, dist, prev, start); for(int i = 0; i<n; i++) if(i != start) cout<<start<<" to "<<i<<", Cost: "<<dist[i]<<" Previous: "<<prev[i]<<endl; }
输出结果
0 to 1, Cost: 3 Previous: 0 0 to 2, Cost: 5 Previous: 1 0 to 3, Cost: 4 Previous: 1 0 to 4, Cost: 6 Previous: 3 0 to 5, Cost: 7 Previous: 2 0 to 6, Cost: 7 Previous: 4
-
我遇到了一个将Dijkstras算法的伪代码转换为实际代码的问题。我给出了邻接列表,如“位置-相邻位置-到位置的距离”,一个节点的例子:AAA AAC 180 AAD 242 AAH 40。我的任务是读取一个按邻接列表组织的文件,并计算从一个节点到另一个节点的最短路径。下面是Dijkstra伪代码: 我遇到的最大的麻烦是“对于与v相邻的每个顶点w”这一行,这里是我的非工作代码: 使用我的顶点类,我
-
我有一个无向加权图,作为邻接列表实现。有一个hashmap,其中节点对象作为键,边对象列表作为值。这些边对象包含两个节点之间边的权重。 我试图编写一个Dijkstra的最短路径算法;但是我担心我的图结构太复杂,无法理解我能为Dijkstra找到的所有示例/伪代码。有人能提供任何帮助吗?提前感谢。
-
在斯坦福的一门算法课程中,教授为图的邻接表表示列出了以下成分: 顶点数组或列表 边的数组或列表 顶点列表中的每个顶点都指向其上的边。 边列表中的每个边都指向其边点。 这种表示法与图形的“关联表”表示法相同吗?如果是,为什么本文认为“邻接表”和“发生率表”是分开的?
-
实现稀疏连接图的更空间高效的方法是使用邻接表。在邻接表实现中,我们保存Graph 对象中的所有顶点的主列表,然后图中的每个顶点对象维护连接到的其他顶点的列表。 在我们的顶点类的实现中,我们将使用字典而不是列表,其中字典键是顶点,值是权重。 Figure 4 展示了 Figure 2中的图的邻接列表示。 Figure 4 邻接表实现的优点是它允许我们紧凑地表示稀疏图。 邻接表还允许我们容易找到直接连
-
我在这里读到,对于无向图,当表示为邻接表时,空间复杂度是,其中和分别是顶点和边的个数。 我的分析是,对于一个完全连通的图,列表中的每个条目将包含节点,那么我们总共有顶点,因此,空间复杂度似乎是这似乎是我在这里遗漏了什么?
-
在书中,他们做过这样的宣示: 我应该如何将下面图的输入作为邻接表并输出它的邻接表表示?假设,edge的每个成本是10。