
神经元扩展模块Python接口
dc_motor_driver --- 双直流电机驱动模块
功能相关函数
dc_motor_driver.set_power(speed, ch = 0)
设置双路直流电机各路电机的动力,参数:
- speed 控制目标电机的动力值,参数范围是
-100 ~ 100。 - ch 控制的电机通道,参数范围是
0 ~ 2,其中0表示两路电机通道,1表示插槽1通道,2表示插槽2通道。
程序示例
import codey
import neurons
import event
@event.button_a_pressed
def on_button_a_pressed():
print("button a event succeeded")
neurons.dc_motor_driver.set_power(100, 1)
@event.button_b_pressed
def on_button_b_pressed():
print("button b event succeeded")
neurons.dc_motor_driver.set_power(100, 2)
@event.button_c_pressed
def on_button_c_pressed():
print("button c event succeeded")
neurons.dc_motor_driver.set_power(100, 0)
neurons.dc_motor_driver.set_power(100, 1, 2)
servo_driver --- 双舵机驱动模块
功能相关函数
servo_driver.set_angle(position, ch = 0)
设置双路舵机各路电机的动力,参数:
- position 控制目标舵机的转动角度,参数范围是
0 ~ 180。 - ch 控制的舵机通道,参数范围是
0 ~ 2,其中0表示两路舵机通道,1表示插槽1通道,2表示插槽2通道。
程序示例
import codey
import neurons
import event
import time
neurons.servo_driver.set_angle(0, 0)
time.sleep(1)
@event.button_a_pressed
def on_button_a_pressed():
print("button a event succeeded")
neurons.servo_driver.set_angle(100, 1)
@event.button_b_pressed
def on_button_b_pressed():
print("button b event succeeded")
neurons.servo_driver.set_angle(100, 2)
@event.button_c_pressed
def on_button_c_pressed():
print("button c event succeeded")
neurons.servo_driver.set_angle(100, 0)
led_strip --- 灯带驱动模块
功能相关函数
led_strip.set_single(index, red_value, green_value, blue_value)
设置灯带上单个灯的颜色, 参数:
- index 设置第几个灯,参数范围是
1 ~ 灯带的最大灯珠数目。 - red_value 全彩LED红色分量的数值,参数范围是
0 ~ 255, 0为无红色分量,255是红色分量最亮。 - green_value 全彩LED绿色分量的数值,参数范围是
0 ~ 255, 0为无绿色分量,255是绿色分量最亮。 - blue_value 全彩LED蓝色分量的数值,参数范围是
0 ~ 255, 0为无蓝色分量,255是蓝色分量最亮。
led_strip.set_all(red_value, green_value, blue_value)
设置全部灯带的颜色, 参数:
- red_value 全彩LED红色分量的数值,参数范围是
0 ~ 255, 0为无红色分量,255是红色分量最亮。 - green_value 全彩LED绿色分量的数值,参数范围是
0 ~ 255, 0为无绿色分量,255是绿色分量最亮。 - blue_value 全彩LED蓝色分量的数值,参数范围是
0 ~ 255, 0为无蓝色分量,255是蓝色分量最亮。
led_strip.set_effect(mode, speed, list)
设置灯条的灯效,参数:
- mode 灯效的模式,参数范围是 0 ~ 5,其中:
- 0: 表示静态模式,按设定的颜色点亮前N个灯,未设置的灯珠处于熄灭状态。
- 1: 表示滚动模式,按设定的颜色点亮前N个灯,按设定动态变化速度,N个灯图案,向后滚动,每次滚动一个灯,循环滚动。如下图:
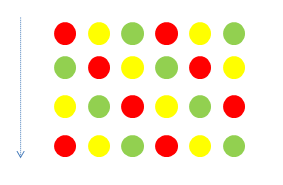
- 2: 表示重复模式,按设定的颜色点亮前N个灯,后面的灯重复前面N个灯的效果,直到最后一个灯。如下图:

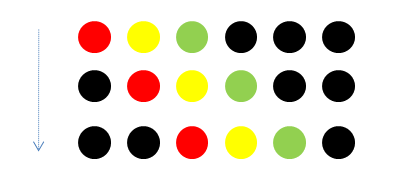
- 3: 表示跑马灯模式,重复的效果加上动态变化,按设定的动态变化速度,N个灯循环挪动。如下图:
- 4: 表示呼吸灯模式,呼吸灯的变化速度按人的呼吸频率3秒1次。
- 5: 表示渐变模式,整条灯带从原来的颜色渐变到新设定的颜色,变化间隔时间可设定。
- speed 动态变化速度,参数范围是
0 ~ 8,0最慢,8最快。(只针对有动态变化的灯效的设置)。 - list 可变参数列表,每个数值的参数范围是
0 ~ 8,第1个参数表示第一个灯的颜色,第2个参数表示第二个灯的颜色...,颜色的参数如下:黑(0x00),红(0x01),橙(0x02),黄(0x03),绿(0x04),青(0x05),蓝(0x06),紫(0x07),白(0x08)。
程序示例
import codey
import neurons
import event
import time
neurons.led_strip.set_all(0, 0, 255)
time.sleep(1)
@event.button_a_pressed
def on_button_a_pressed():
print("button a event successed")
neurons.led_strip.set_all(0, 0, 0)
neurons.led_strip.set_single(1, 255, 0, 0)
time.sleep(1)
neurons.led_strip.set_all(0, 0, 0)
neurons.led_strip.set_single(2, 255, 0, 0)
time.sleep(1)
neurons.led_strip.set_all(0, 0, 0)
neurons.led_strip.set_single(3, 255, 0, 0)
time.sleep(1)
@event.button_b_pressed
def on_button_b_pressed():
print("button b event successed")
neurons.led_strip.set_effect(0, 8, (1,6,8,1,6,8,1,6,8))
time.sleep(3)
neurons.led_strip.set_effect(1, 8, (1,6,8,1,6,8,1,6,8))
time.sleep(3)
neurons.led_strip.set_effect(2, 8, (1,6,8,1,6,8,1,6,8))
time.sleep(3)
neurons.led_strip.set_effect(3, 8, (1,6,8,1,6,8,1,6,8))
time.sleep(3)
neurons.led_strip.set_effect(4, 8, (1,6,8,1,6,8,1,6,8))
time.sleep(3)
neurons.led_strip.set_effect(5, 8, (1,6,8,1,6,8,1,6,8))
time.sleep(3)
@event.button_c_pressed
def on_button_c_pressed():
print("button c event successed")
neurons.led_strip.set_effect(0, 5, (1,1,1,1,1,1,1,1,1))
time.sleep(3)
neurons.led_strip.set_effect(1, 5, (1,1,1,1,1,1,1,1,1))
time.sleep(3)
neurons.led_strip.set_effect(2, 5, (1,1,1,1,1,1,1,1,1))
time.sleep(3)
neurons.led_strip.set_effect(3, 5, (1,1,1,1,1,1,1,1,1))
time.sleep(3)
neurons.led_strip.set_effect(4, 5, (1,1,1,1,1,1,1,1,1))
time.sleep(3)
neurons.led_strip.set_effect(5, 5, (1,1,1,1,1,1,1,1,1))
time.sleep(3)
led_panel --- LED面板模块
功能相关函数
led_panel.set_all(red_value, green_value, blue_value)
设置并显示整个LED面板的颜色, 参数:
- red_value 全彩LED红色分量的数值,参数范围是
0 ~ 255, 0为无红色分量,255是红色分量最亮。 - green_value 全彩LED绿色分量的数值,参数范围是
0 ~ 255, 0为无绿色分量,255是绿色分量最亮。 - blue_value 全彩LED蓝色分量的数值,参数范围是
0 ~ 255, 0为无蓝色分量,255是蓝色分量最亮。
led_panel.set_pixel(x, y, red_value, green_value, blue_value)
设置LED面板单个像素点的颜色,参数:
- x 像素点在表情面板上x轴的坐标,参数范围是
0 ~ 7。 - y 像素点在表情面板上y轴的坐标,参数范围是
0 ~ 7。 - red_value 全彩LED红色分量的数值,参数范围是
0 ~ 255, 0为无红色分量,255是红色分量最亮。 - green_value 全彩LED绿色分量的数值,参数范围是
0 ~ 255, 0为无绿色分量,255是绿色分量最亮。 - blue_value 全彩LED蓝色分量的数值,参数范围是
0 ~ 255, 0为无蓝色分量,255是蓝色分量最亮。
led_panel.show_image(list, mode = 0)
以图片参数的方式设置显示的内容,参数:
- list 可变参数列表,每个数值的参数范围是
0 ~ 8,第1个参数表示第一个灯的颜色,第2个参数表示第二个灯的颜色...,颜色的参数如下:黑(0x00),红(0x01),橙(0x02),黄(0x03),绿(0x04),青(0x05),蓝(0x06),紫(0x07),白(0x08)。 - mode 显示内容的呈现方式,参数范围是
0 ~ 3,其中:- 0:表示显现模式,直接将设定的图案显示出来。
- 1:表示擦除模式,原图像按竖列逐渐消失,同时设定的图像按竖列逐渐显现出来。
- 2:表示左移模式,原图像向左移动消失,设定的图像向左移动显现出来
- 3:表示右移模式,原图像向右移动消失,设定的图像向右移动显现出来
led_panel.set_animation(frame_index, list)
设置LED面板的动画帧内容,参数:
- frame_index 动画帧的帧序列,参数范围是
0 ~ 3,0表示第一帧。 - list 可变参数列表,每个数值的参数范围是
0 ~ 8,第1个参数表示第一个灯的颜色,第2个参数表示第二个灯的颜色...,颜色的参数如下:黑(0x00),红(0x01),橙(0x02),黄(0x03),绿(0x04),青(0x05),蓝(0x06),紫(0x07),白(0x08)。
led_panel.show_animation(frame_speed, mode)
显示 set_animation 设定的动画帧内容,参数:
- frame_speed 动画帧的切换速度,参数范围是
0 ~ 2,其中:- 0:表示慢速,1秒的滚动间隔。
- 1:表示正常,0.5秒的滚动间隔。
- 2:表示快速,0.2秒的滚动间隔。
- mode 帧变化的模式,参数范围是
0 ~ 3,其中:- 0:表示显现模式,直接将设定的图案显示出来。
- 1:表示擦除模式,原图像按竖列逐渐消失,同时设定的图像按竖列逐渐显现出来。
- 2:表示左移模式,原图像向左移动消失,设定的图像向左移动显现出来
- 3:表示右移模式,原图像向右移动消失,设定的图像向右移动显现出来
led_panel.show_string(red_value, green_value, blue_value, list)
按指定颜色显示字符串,参数:
- red_value 全彩LED红色分量的数值,参数范围是
0 ~ 255, 0为无红色分量,255是红色分量最亮。 - green_value 全彩LED绿色分量的数值,参数范围是
0 ~ 255, 0为无绿色分量,255是绿色分量最亮。 - blue_value 全彩LED蓝色分量的数值,参数范围是
0 ~ 255, 0为无蓝色分量,255是蓝色分量最亮。 - list 可变参数列表,第1个字符,第2个字符...
led_panel.clear()
清除面板的显示,即所有LED灯珠都熄灭。
程序示例
import codey
import neurons
import event
import time
neurons.led_panel.clear()
neurons.led_panel.set_all(0, 0, 255)
time.sleep(1)
neurons.led_panel.clear()
@event.button_a_pressed
def on_button_a_pressed():
print("button a event successed")
neurons.led_panel.set_pixel(0, 0, 255, 0, 0)
time.sleep(1)
neurons.led_panel.set_pixel(4, 4, 255, 0, 0)
time.sleep(1)
neurons.led_panel.set_pixel(7, 7, 255, 0, 0)
time.sleep(1)
neurons.led_panel.set_pixel(0, 6, 255, 0, 0)
time.sleep(1)
@event.button_b_pressed
def on_button_b_pressed():
print("button b event successed")
neurons.led_panel.show_image([1,6,8,0,0,0,1,6,8],0)
time.sleep(1)
neurons.led_panel.show_image([1,1,1,1,1,1,1,1,1],1)
time.sleep(1)
neurons.led_panel.show_image([6,6,6,6,6,6,6,6,6],2)
time.sleep(1)
neurons.led_panel.show_image([8,8,8,8,8,8,8,8,8],3)
time.sleep(1)
@event.button_c_pressed
def on_button_c_pressed():
print("button c event successed")
neurons.led_panel.set_animation(0, (1,6,8,1,6,8,0,0,0))
neurons.led_panel.set_animation(1, (6,6,6,6,6,6,6,6,6))
neurons.led_panel.set_animation(2, [6,6,6,6,6,6,6,6,6])
neurons.led_panel.set_animation(3, (8,8,8,8,8,8,8,8,8))
neurons.led_panel.show_animation(1, 2)
time.sleep(6)
neurons.led_panel.show_string(255, 0, 0, "hello")
time.sleep(4)
neurons.led_panel.show_string(255, 0, 0, (100))
time.sleep(4)
neurons.led_panel.show_string(255, 0, 0, (1,2,3))
time.sleep(4)
buzzer --- 蜂鸣器模块
功能相关函数
buzzer.play_note(note_num, beat = None)
播放音符, 数字音符定义请参考: 数字音符说明for()Beats(block)),参数:
- note_num 数值型,数值范围
48 - 72,或者字符串类型,如 C4。 - beat 数值数据,表示节拍数,如果不填,则一直播放。 音符与频率的对应关系如下:
['C2','65'], ['D2','73'], ['E2','82'], ['F2','87'], ['G2','98'], ['A2','110'], ['B2','123'], ['C3','131'], ['D3','147'], ['E3','165'], ['F3','175'], ['G3','196'], ['A3','220'], ['B3','247'], ['C4','262'], ['D4','294'], ['E4','330'], ['F4','349'], ['G4','392'], ['A4','440'], ['B4','494'], ['C5','523'], ['D5','587'], ['E5','659'], ['F5','698'], ['G5','784'], ['A5','880'], ['B5','988'], ['C6','1047'], ['D6','1175'], ['E6','1319'], ['F6','1397'], ['G6','1568'], ['A6','1760'], ['B6','1976'], ['C7','2093'], ['D7','2349'], ['E7','2637'], ['F7','2794'], ['G7','3136'], ['A7','3520'], ['B7','3951'], ['C8','4186'], ['D8','4699'],
buzzer.play_tone(frequency, time = None)
播放设定频率的声音,参数:
- frequency 数值数据,播放声音的频率,其数值范围是
0 ~ 5000。 - time 数值数据,表示播放时间(单位是
毫秒-ms),其数值范围是0 ~ 数值范围极限。
buzzer.rest(number)
停止节拍,参数:
- number 数值数据,暂停的节拍数,其数值范围是
0 ~ 数值范围极限。
常量
buzzer.tempo
数值数据,数值范围是 6 ~ 600,表示播放速度的属性,单位是 bmp(beat per minute),即每一个节拍的长度。 默认数值是60,即一个节拍的维持时间是1秒。 rest 和 play_note 函数的节拍会受该常量影响。
程序示例
import codey
import time
import neurons
codey.display.show("hello")
neurons.buzzer.play_note(48, 1)
neurons.buzzer.rest(1)
codey.display.show("note")
codey.display.clear()
neurons.buzzer.play_note("C4", 1)
neurons.buzzer.rest(1)
codey.display.show("C4")
codey.display.clear()
neurons.buzzer.play_tone(1000, 2)
neurons.buzzer.rest(1)
codey.display.show("tone")
codey.display.clear()
while True:
neurons.buzzer.tempo = 60
print("tempo:", end = "")
print(neurons.buzzer.tempo)
neurons.buzzer.play_note("C4", 1)
neurons.buzzer.rest(2)
neurons.buzzer.tempo = 240
neurons.buzzer.play_note("C4", 1)
neurons.buzzer.rest(2)
button --- 按钮模块
功能相关函数
button.is_pressed()
获取按键的当前状态。 返回的结果是 True:按键被按下, 或者 False: 按键未被按下。
程序示例
import codey
import neurons
while True:
if neurons.button.is_pressed():
print("pressed!")
funny_touch --- 触摸开关(四控)模块
触摸开关(四控)使用说明
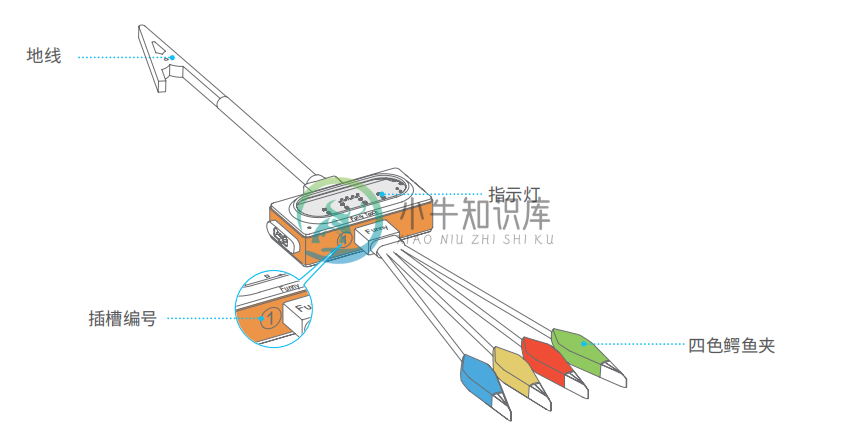
触摸开关可以连接导电的物品(如香蕉、水),将它变成触摸开关。通过检测四色鳄鱼夹和地线的导通状态,实现简单有趣的交互效果。
如何使用:
- 将四色鳄鱼夹插到插槽 1,地线插到插槽 2。
- 用鳄鱼夹夹住一个导电物体。
- 抓住地线的金属夹子,同时用另一只手触摸导电物体,触摸开关相应指示灯亮起,模块将发出一个触发信号。
注:鳄鱼夹比较锋利,请不要用四色鳄鱼夹或地线夹子夹自己或他人,否则可能会造成伤害
功能相关函数
funny_touch.is_red_touched()
四色鳄鱼夹的红色鳄鱼夹是否有被触摸(或者间接触摸),返回的结果是 True:被触摸了, 或者 False: 未被触摸。
funny_touch.is_green_touched()
四色鳄鱼夹的绿色鳄鱼夹是否有被触摸(或者间接触摸),返回的结果是 True:被触摸了, 或者 False: 未被触摸。
funny_touch.is_yellow_touched()
四色鳄鱼夹的黄色鳄鱼夹是否有被触摸(或者间接触摸),返回的结果是 True:被触摸了, 或者 False: 未被触摸。
funny_touch.is_blue_touched()
四色鳄鱼夹的蓝色鳄鱼夹是否有被触摸(或者间接触摸),返回的结果是 True:被触摸了, 或者 False: 未被触摸。
程序示例
import codey
import time
import event
import neurons
@event.start
def start_cb():
while True:
if neurons.funny_touch.is_blue_touched():
print("blue touched")
if neurons.funny_touch.is_red_touched():
print("red touched")
if neurons.funny_touch.is_green_touched():
print("green touched")
if neurons.funny_touch.is_yellow_touched():
print("yellow touched")
time.sleep(0.1)
ultrasonic_sensor --- 超声波传感器模块
功能相关函数
ultrasonic_sensor.get_distance()
获取超声波传感器测量的前方障碍物的距离,单位是 厘米,返回的数据是浮点类型数值。 测量的范围是 3 ~ 300 厘米,3厘米以内的测量数据会不准确,数值的范围是 0 ~ 300 厘米。
程序示例
import codey
import time
import event
import neurons
@event.start
def start_cb():
while True:
print(neurons.ultrasonic_sensor.get_distance())
time.sleep(0.2)
gyro_sensor --- 陀螺仪传感器
陀螺仪传感器说明
神经元模块的陀螺仪的坐标体系如下图所示: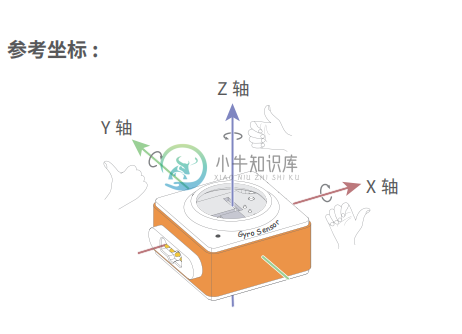
功能相关函数
gyro_sensor.get_roll()
获取姿态角的翻滚角,返回的数据范围是 -90 ~ 90
gyro_sensor.get_pitch()
获取姿态角的俯仰角,返回的数据范围是 -180 ~ 180
gyro_sensor.get_yaw()
获取姿态角的偏航角,返回的数据范围是 -32768 ~ 32767,由于板载的陀螺仪模块是六轴传感器,没有电子罗盘。 所以实际上偏航角只是使用了Z轴角速度的积分。它存在着积累误差。如果是想获得真实偏航角的,这个API不适合使用。
gyro_sensor.is_shaked()
检测神经元的陀螺仪模块是否有被摇晃,返回值是布尔值,其中 True 表示陀螺仪模块被晃动了,False 表示陀螺仪模块未被晃动。
gyro_sensor.get_acceleration(axis)
获取三个轴的加速度值,单位是 g,参数:
- axis 字符串类型,以
x,y,z代表陀螺仪模块定义的坐标轴。
gyro_sensor.get_gyroscope(axis)
获取三个轴的角速度值,单位是 °/秒,参数:
- axis 字符串类型,以
x,y,z代表陀螺仪模块定义的坐标轴。
程序示例1:
import rocky
import event
import neurons
@event.button_a_pressed
def on_button_a_callback():
codey.stop_other_scripts()
codey.display.show("pit")
while True:
print(neurons.gyro_sensor.get_pitch())
time.sleep(0.05)
@event.button_b_pressed
def on_button_b_callback():
codey.stop_other_scripts()
codey.display.show("rol")
while True:
print(neurons.gyro_sensor.get_roll())
time.sleep(0.05)
@event.button_c_pressed
def on_button_c_callback():
codey.stop_other_scripts()
codey.display.show("yaw")
while True:
print(neurons.gyro_sensor.get_yaw())
time.sleep(0.05)
程序示例2:
import rocky
import event
import neurons
@event.start
def start_cb():
codey.display.show("sha")
while True:
print(neurons.gyro_sensor.is_shaked())
time.sleep(0.2)
程序示例3:
import rocky
import event
import neurons
@event.start
def start_cb():
while True:
print("gyro z:", end = "")
print(neurons.gyro_sensor.get_gyroscope("z"))
print("accel z:", end = "")
print(neurons.gyro_sensor.get_acceleration("z"))
time.sleep(0.2)
pir_sensor --- 人体红外传感器模块
功能相关函数
pir_sensor.is_activated()
获取传感器的检测结果。 返回的结果是 True:检测到附近有人, 或者 False: 未检测到活动的人。
程序示例
import codey
import time
import event
import neurons
@event.start
def start_cb():
while True:
print(neurons.pir_sensor.is_activated())
time.sleep(0.2)
soil_moisture --- 土壤湿度传感器模块
功能相关函数
soil_moisture.get_value()
获取传感器检测到的土壤湿度值,数值的范围是 0 ~ 100 数值越大,表示土壤湿度越高。
程序示例
import codey
import time
import event
import neurons
@event.start
def start_cb():
while True:
print(neurons.soil_moisture.get_value())
time.sleep(0.2)