
python 实现非极大值抑制算法(Non-maximum suppression, NMS)

NMS 算法在目标检测,目标定位领域有较广泛的应用。
算法原理
非极大值抑制算法(Non-maximum suppression, NMS)的本质是搜索局部极大值,抑制非极大值元素。
算法的作用
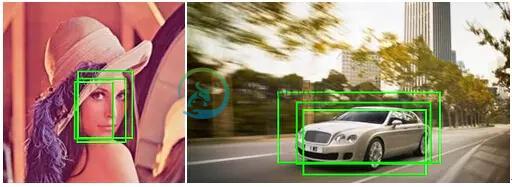
当算法对一个目标产生了多个候选框的时候,选择 score 最高的框,并抑制其他对于改目标的候选框
适用场景
一幅图中有多个目标(如果只有一个目标,那么直接取 score 最高的候选框即可)。
算法的输入
算法对一幅图产生的所有的候选框,以及每个框对应的 score (可以用一个 5 维数组 dets 表示,前 4 维表示四个角的坐标,第 5 维表示分数),阈值 thresh。
算法的输出
正确的候选框组(dets 的一个子集)。
细节
- 起始,设所有的框都没有被抑制,所有框按照 score 从大到小排序。
- 从第 0 个框(分数最高)开始遍历:对于每一个框,如果该框没有被抑制,就将所有与它 IoU 大于 thresh 的框设为抑制。
- 返回没被抑制的框。
参考代码
# --------------------------------------------------------
# Fast R-CNN
# Copyright (c) 2015 Microsoft
# Licensed under The MIT License [see LICENSE for details]
# Written by Ross Girshick
# --------------------------------------------------------
import numpy as np
cimport numpy as np
cdef inline np.float32_t max(np.float32_t a, np.float32_t b):
return a if a >= b else b
cdef inline np.float32_t min(np.float32_t a, np.float32_t b):
return a if a <= b else b
def cpu_nms(np.ndarray[np.float32_t, ndim=2] dets, np.float thresh):
cdef np.ndarray[np.float32_t, ndim=1] x1 = dets[:, 0]
cdef np.ndarray[np.float32_t, ndim=1] y1 = dets[:, 1]
cdef np.ndarray[np.float32_t, ndim=1] x2 = dets[:, 2]
cdef np.ndarray[np.float32_t, ndim=1] y2 = dets[:, 3]
cdef np.ndarray[np.float32_t, ndim=1] scores = dets[:, 4]
cdef np.ndarray[np.float32_t, ndim=1] areas = (x2 - x1 + 1) * (y2 - y1 + 1)
cdef np.ndarray[np.int_t, ndim=1] order = scores.argsort()[::-1]
cdef int ndets = dets.shape[0]
cdef np.ndarray[np.int_t, ndim=1] suppressed = \
np.zeros((ndets), dtype=np.int)
# nominal indices
cdef int _i, _j
# sorted indices
cdef int i, j
# temp variables for box i's (the box currently under consideration)
cdef np.float32_t ix1, iy1, ix2, iy2, iarea
# variables for computing overlap with box j (lower scoring box)
cdef np.float32_t xx1, yy1, xx2, yy2
cdef np.float32_t w, h
cdef np.float32_t inter, ovr
keep = []
for _i in range(ndets):
i = order[_i]
if suppressed[i] == 1:
continue
keep.append(i)
ix1 = x1[i]
iy1 = y1[i]
ix2 = x2[i]
iy2 = y2[i]
iarea = areas[i]
for _j in range(_i + 1, ndets):
j = order[_j]
if suppressed[j] == 1:
continue
xx1 = max(ix1, x1[j])
yy1 = max(iy1, y1[j])
xx2 = min(ix2, x2[j])
yy2 = min(iy2, y2[j])
w = max(0.0, xx2 - xx1 + 1)
h = max(0.0, yy2 - yy1 + 1)
inter = w * h
ovr = inter / (iarea + areas[j] - inter)
if ovr >= thresh:
suppressed[j] = 1
return keep
以上就是python 实现非极大值抑制算法(Non-maximum suppression, NMS)的详细内容,更多关于python 非极大值抑制算法的资料请关注小牛知识库其它相关文章!
-
我想我终于对minimax和Alpha-beta修剪有所了解了,但实现它完全是另一回事! 根据我的理解,基础是:您为某些动作分配一个启发式函数分数(Gomoku为例)。 如果一行有5个,我们应该分配一个高值,比如9999,因为这是一个胜利的举动 当我们必须在Java中实现这一点时,我的问题来了! 我有一块彩色[][]板(8x8),其中黑色是播放器1,白色是播放器2,null表示空白,我不知道我们应
-
计算机科学中最有趣的事情之一就是编写一个人机博弈的程序。有大量的例子,最出名的是编写一个国际象棋的博弈机器。但不管是什么游戏,程序趋向于遵循一个被称为Minimax算法,伴随着各种各样的子算法在一块。本篇将简要介绍 minimax 算法,并通过实例分析帮助大家更好的理解。 一、概念 Minimax算法又名极小化极大算法,是一种找出失败的最大可能性中的最小值的算法。Minimax算法常用于棋类等由两
-
我已经实现了一个带有alpha beta修剪的NegaMax算法(这只是一个较短版本的极小值算法)。现在我想实现迭代深化,这样我就可以为每个深度找到最佳移动,然后根据之前层的分数重新排序树下的节点,以便我的alphabeta修剪工作更有效。 以下是我迄今为止所做的工作: 这里gs是随每一步移动而变化的游戏属性,包含了所有关于游戏在t点的信息,比如是否可以施法或者是否有可能的内移。我的egamax算
-
我目前正在尝试写一个能玩象棋游戏的人工智能。为此,我使用了minimax算法的一种变体,该算法迭代每一个可能的移动,然后假设深度为N时,对手(和他们)将以最佳方式进行N个移动。此外观的伪代码如下所示: 当调用“移动”时,它会检测是否拍摄了一幅作品,然后为该作品生成一个分数,该分数被保存到变量“温度”中。对于深度为2的情况,我简单地调用另一个Depth1方法,但改变颜色。对于深度为3的情况,我再次调
-
极小极大算法的一个缺点是每个板状态必须被访问两次:一次查找其子级,第二次评估启发式值。 极小极大算法还有其他缺点或优点吗?对于像象棋这样的游戏,还有更好的选择吗?(当然是带有α-β修剪的极小极大算法,但还有其他吗?)
-
本文向大家介绍python实现八大排序算法(1),包括了python实现八大排序算法(1)的使用技巧和注意事项,需要的朋友参考一下 排序 排序是计算机内经常进行的一种操作,其目的是将一组”无序”的记录序列调整为”有序”的记录序列。分内部排序和外部排序。若整个排序过程不需要访问外存便能完成,则称此类排序问题为内部排序。反之,若参加排序的记录数量很大,整个序列的排序过程不可能完全在内存中完成,需要访问