《无人车规划算法实习》专题
-
 机械专业转算法岗位(百度Apollo决策规划面试)
机械专业转算法岗位(百度Apollo决策规划面试)Coding: 三道算法题。。。 这就是Apollo么 如何寻找二次曲线(离散的点连成的)的最小值 迷宫问题 二叉搜索树 技术面 我的项目是:使用PPO水了一篇文章;复现了IMPALA算法;熟悉一些强化学习算法 基本的强化学习算法:DQN系列,PPO,On-Policy Off-Policy等,问的很深 文章中的强化学习建模(状态、动作、奖励函数等),网络结构 对于A*的了解么?Hybrid A*
-
 美团网约车算法面经
美团网约车算法面经9.1一面 一、实习 & 项目 Q:KM算法中的权重?动态变化? A:str / 接驾时长 Q:自注意力机制? 二、概率题 Q:30次都不点击的概率是0.936,问10次中至少点击一次的概率? A:1-(1-0.936)^(1/3) 三、算法题 不含重复字符的最小子串长度 9.14二面 一、问项目:实习相关 约40min Q:如何评估仿真系统的准确性? A:校准 二、深度相关问题 Q:平台补贴场景
-
 哈啰单车-算法工程师
哈啰单车-算法工程师技术面 hr自我介绍,说了岗位的需求,接到一个硬件相关的项目,需要有硬件知识的同学 自我介绍 说说运筹学中的旅行商问题 介绍机器学习中的XGBoost 我还需要补足哪方面的知识?(NB-loT、蓝牙、计算机原理)
-
 途虎养车算法岗一面
途虎养车算法岗一面面试官老师很有耐心 主要深挖项目为主 1.问项目,介绍自己项目的核心算法经历 2.问模型,yolo结构,对比其他结构的优点 3.继续挖项目,挖的很深,项目技术细节,如何实现的,如何设计算法,如何考虑算法 4.问了另一个项目的文字识别模型,如果有新的项目,怎么去选择模型,考虑的因素诸如此类。 5.问笔试题,问了最后一道为什么错了(我有点想不起来了,笔试太多了) 总结:主要深挖了项目,项目不熟悉的话不
-
无界背包的动态规划极小化
我很好奇是否有可能修改(或使用)无界背包问题的DP算法,以最小化背包中物品的总价值,同时使总重量至少有一些最小约束C。 UKP最大化版本的自下而上DP算法: 我们能做一个最小化的UKP吗?如果没有,有人能提供另一种解决方案或技术来解决这样的问题吗? 谢谢,丹
-
 动态规划之矩阵连乘问题Python实现方法
动态规划之矩阵连乘问题Python实现方法本文向大家介绍动态规划之矩阵连乘问题Python实现方法,包括了动态规划之矩阵连乘问题Python实现方法的使用技巧和注意事项,需要的朋友参考一下 本文实例讲述了动态规划之矩阵连乘问题Python实现方法。分享给大家供大家参考,具体如下: 给定n个矩阵{A1,A2,…,An},其中Ai与Ai+1是可乘的,i=1,2 ,…,n-1。如何确定计算矩阵连乘积的计算次序,使得依此次序计算矩阵连乘积需要的数
-
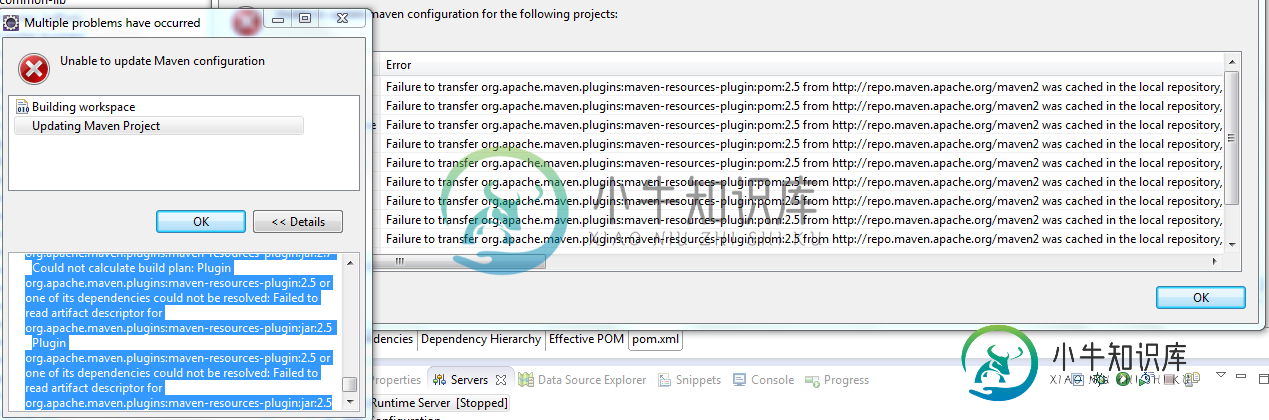 无法更新Maven配置无法计算生成计划:Plugin org.apache.Maven.plugins:maven-resources-plugin:2.5
无法更新Maven配置无法计算生成计划:Plugin org.apache.Maven.plugins:maven-resources-plugin:2.5在eclipse内部,当我做maven->Update项目时,我遇到了以下问题 我尝试了这里提供的解决方案无法计算构建计划:artifact org.apache.maven.plugins:maven-resources-plugin:pom:2.4.3在本地存储库中不可用 并且更新了我的Maven项目,但是我仍然遇到同样的问题,即使我试图在pom.xml文件中添加依赖项,但是没有成功地解决这个
-
联系人搜索算法
实现较为完整的联系人词条搜索算法。SearchCore 为C语音编写,ios、android、symbian都可以用。具体功能见下面。 内存占用: 10000个人2M左右 效率:6K人搜索,100ms左右(iphone4) 支持搜索内容: 1.姓名搜索:支持汉字、模糊拼音、多音字搜索,只匹配连续的字; 2.号码搜索; 3.支持T9键盘的数字对应字母的匹配,只需设置MatchFunction为键盘2
-
动态规划过程
我正在尝试实施这个问题的解决方案,但我遇到了一些问题。 问题是: “在r行和c列的网格的左上角有一个机器人。机器人只能向右或向下移动,某些单元格是“禁止”的,这意味着机器人不能踩它们。设计一个算法来为机器人找到从左上角到右下的路径。” 解决方案如下所示: 让我困惑的是动态编程的尝试。 从不计算为。 我已经覆盖了Point类中的和方法,所以失败了。只要所比较的对象具有相同的行和列值,contains
-
规划您的训练
您可以在 Polar Flow 网络服务或 Polar Flow 应用程式中规划您的训练并创建个人训练目标。 使用季度规划工具,创建训练计划 Flow 网络服务中的 Season Planner (季度规划工具)是度身打造年度训练计划的理想工具。无论训练目标如何,Polar Flow 都可以帮助您创建达成的综合计划。您可以在 Polar Flow 网络服务中的 Programs(程序)选项卡中找到
-
规划您的训练
要规划您的训练,您可以在 Flow 网络服务中创建详细的训练目标,并利用 Flowsync 软件或 Flow 应用程式将其同步至 A370。在训练期间,A370 将指导您实现您的目标。请注意,A370 采用在 Flow 网络服务规划的训练中的心率区——EnergyPointer 功能不可用。 快捷目标:选择训练的时长、或卡路里目标。例如,您可以选择消耗 500 千卡路里、跑 30 分钟。 阶段性目
-
规划您的训练
您可以在 Polar Flow 网络服务或 Polar Flow 应用程式中规划您的训练并创建个人训练目标。 使用季度规划工具,创建训练计划 Flow 网络服务中的 Season Planner (季度规划工具)是度身打造年度训练计划的理想工具。无论训练目标如何,Polar Flow 都可以帮助您创建达成的综合计划。您可以在 Polar Flow 网络服务中的 程序 选项卡中找到季度规划工具。 P
-
规划您的训练
要规划您的训练,您可以在 Flow 网络服务中创建详细的训练目标,并利用 Flowsync 软件或 Flow 应用程式将其同步至 A300。在训练期间,A300 将指导您实现您的目标。请注意,A300 采用 Flow 网络服务规划的训练中的心率区——EnergyPointer 功能不可用。 快捷目标:选择训练的时长、或卡路里目标。例如,您可以选择消耗 500 千卡路里或训练 30 分钟。 阶段性目
-
规划你的应用
为了展示如何搭建Ember应用程序,我们将搭建一个资产租赁的应用,叫Super Rentals。我们将开始于一个home页面,一个about页面和一个联系我们页面。 应用程序的构成是: 在home页面上显示租赁清单 链接到关于公司的页面 链接到“联系我们”的页面 列出有效的租赁清单 按城市过滤租赁清单 显示一个选中租赁的详细信息 上面列出了6个路由,在下文的验收测试中提到“应用目标”,就是指将这6
-
5.2 单路线规划
支持选择单起点、多终点,进行单路线规划,规划出的道路是一条,各个终点将按照最优路径串连 出行方式 汽车出行 自行车出行 起点 确定起点的方式有两种: 方式一:搜索;即输入关键字,进行模糊匹配,匹配的结果分为:POI点、网点、网点图层类型 也就是说可以从这三类数据里找到你需要的起点 方式二:地图点选;点选后,鼠标移动到地图上,右击选中位置 终点 确定终点的方式有两种: 方式一:搜索;即输入关键字,进