《探探》专题
-
探寻python多线程ctrl+c退出问题解决方案
本文向大家介绍探寻python多线程ctrl+c退出问题解决方案,包括了探寻python多线程ctrl+c退出问题解决方案的使用技巧和注意事项,需要的朋友参考一下 场景: 经常会遇到下述问题:很多io busy的应用采取多线程的方式来解决,但这时候会发现python命令行不响应ctrl-c 了,而对应的java代码则没有问题: ctrl-c则会结束程序 而对应的python代码: python p
-
即使Kubernetes就绪探测失败,Pod也能接收通信
1)kafka消息已被我的应用程序使用并保存到数据库中。 2)无法访问rest api。 我假设如果Pod的准备探测失败,应用程序既不能接收kafka消息,也不能接收rest请求。但为什么在我的测试中,REST请求和Kafka消息的处理方式不同。 根据Kubernete文档:
-
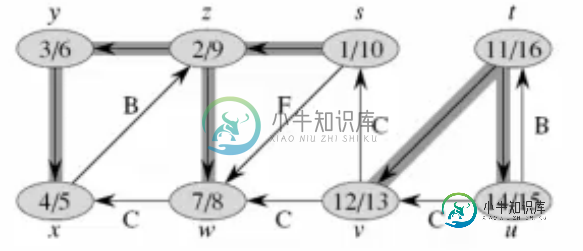 DFS中的探索顺序对边缘分类有影响吗
DFS中的探索顺序对边缘分类有影响吗我正在为学院实现DFS和边缘分类(基于本文提供的代码:https://courses.csail.mit.edu/6.006/fall11/rec/rec14.pdf)。 斜体字母只是顶点的名称,而顶点内部的数字分别是发现时间和完成时间。边缘分为后、前或交叉;其他都是树边。 正如您所看到的,该图是按照以下顺序访问的:首先是,然后是它的邻居(在DFS之后);当没有更多可访问的邻居时,访问开始于。 为
-
为什么这个哈希表查找探针像它一样?
这段代码(从来历不明的LZW压缩程序中提取)在大小为5021的哈希表中找到一个空槽,索引从0到5020: 这不是典型的线性或二次探测。为什么要这样调查?这是一种已知的探测算法吗?我在哪里可以找到更多关于它的信息?
-
线性探测中的聚类如何影响搜索时间
我理解线性探测中的问题,即由于后续的索引,会出现元素簇。但是我不明白这句话
-
elasticsearch 6.3.0在Kubernetes故障下的准备性和活性探测
我正试图在Kubernetes上设置EFK堆栈。正在使用的Elasticsearch版本是6.3.2。在我将探针配置放入部署YAML文件之前,一切都很好。我得到以下错误。这将导致pod被声明为不健康,并最终重新启动,这似乎是一个错误的重新启动。 警告不健康15s kubelet,aks-agentpool-23337112-0活性探测失败:获取http://10.xxx.y.zzz:9200/_c
-
Kubernetes活跃度和就绪度探测器的正确实现
给出一个Python应用程序,它在无限循环中轮询Kafka主题,并在处理接收到的Kafka消息后将结果上传到s3 bucket。 null 并且活性探测只检查轮询循环是否尚未退出。 严格来说,在准备调查中检查这样的事情是不好的做法吗?
-
为什么outlook嗅探器没有处理我的icalendar邀请?
null 这是我的。ICS附件。 这里指定的属性X-MS-OLK-FORCEINSPECTOROPEN没有任何帮助。 我的文件通过了本问题中提到的三个iCalendar验证器
-
Kubernetes的活跃度探测器是谁/在哪里工作的?
请给我一些建议。 提前致谢
-
Spring Cloud 侦探仪器不断打印 TODO 之前/之后 removeServiceName=
从Spring Boot 2.3迁移到2.6后,我在Spring Cloud Sleuth中有奇怪的行为。仪表不断地将这些消息打印到控制台 我在Spring Cloud Sleuth源代码中找到了这个代码片段 这是正确的行为吗?如何禁用这些消息?或者我的数据库连接或迁移后的Spring Cloud Sleuth出现问题?
-
活性/准备状态探测器如何与吊舱通信?
我对k8s很陌生,所以如果这个问题没有意义或者是错误的/愚蠢的,请向我道歉。 我有一个活跃度探测器配置为我的豆荚定义,它只是命中一个健康API并检查它的响应状态,以测试豆荚的活跃度。
-
进一步探索分类 - 新的数据集,新的挑战
是时候使用新的数据集了——比马印第安人糖尿病数据集,由美国国家糖尿病、消化和肾脏疾病研究所提供。 令人惊讶的是,超过30%的比马人患有糖尿病,而全美的糖尿病患者比例是8.3%,中国只有4.2%。 数据集中的一条记录代表一名21岁以上的比马女性,她们分类两类:五年内查出患有糖尿病,以及没有得病。 共选取了8个特征: 怀孕次数; 口服葡萄糖耐量实验两小时后的血浆葡萄糖浓度; 舒张压(mm Hg); 三
-
探索新冠肺炎(COVID-19)对全球航班的影响
随着今天从欧洲到美国的旅行限制生效,以及为了减缓新冠病毒的传播更加劝导群众留在家中,我们很好奇这些措施何影响全旅行。显而易见,我们使用Cesium进行探索。 我们开始收集过去几个月每隔一天的航班数据。下列是进出北京主要国际机场的所有航班: [随着时间的推移,北京首都国际机场(PEK)的预定航班数量已可视化出来。起飞显示为红色,到达显示为绿色。] 一月底,航班数量急剧下降,从大约900架次迅速下降到
-
5.3 Shi-Tomasi 拐角探测器和良好的跟踪功能
目标 在本章中, 我们将学习另一个拐角检测器:Shi-Tomasi拐角检测器 我们将看到以下函数:cv.goodFeaturesToTrack() 理论 在上一章中,我们看到了Harris Corner Detector。1994年下半年,J。Shi和C. Tomasi在他们的论文《有益于跟踪的特征》中做了一个小修改,与Harris Harris Detector相比,显示了更好的结果。哈里斯角落
-
(探戈计划)点云的旋转和平移与区域学习
问题内容: 我有一个Java应用程序,当我按下按钮时,它会记录点云xyz坐标以及正确的姿势。 我想要的是选择一个对象,在前面记录一个pointCloud,在后面记录一个pointCloud,然后合并2个云。 显然,要获得合理的结果,我需要平移和旋转记录的一个或两个云。但是我是Tango Project的新手,我应该缺少一些东西。 那里,@ Jason Guo讨论了这些矩阵: ,, 我怎么能得到他们