《华测导航》专题
-
导航栏的动态数据
我试图动态添加在导航栏,但它一直给这个错误: 警告:mysqli_fetch_array()希望参数1是mysqli_结果,布尔值在第11行的C:\xampp\htdocs\includes\navigation.php中给出 我的PHP代码:
-
Python绘图破折号导航
我的dash应用程序具有基于可用dash留档中找到的食谱的导航。它的工作原理,但它不好看。谁知道介绍菜单的更好方法?我不想开发一个特殊的流星组件,但我很乐意使用目前可用的框架之一(引导,语义学,...)。
-
如何利用导航属性?
OData服务(V2)包含以下多个导航属性: 如上所示,和是导航属性 请求OData服务的代码: 如何通过代码从导航属性中获取URL?我可以通过以下对象获取它: 但我不知道这是不是正确的方式。
-
谷歌地图导航符号
我正在寻找一个谷歌地图导航标记的详尽列表。 为了避免混乱,我不是在找这个。 我理解文本表示会有一些变量,比如回旋的第三个出口。这可以是第一个出口或第二个出口等,但我希望提取迂回从中,并留下这个指令的可变部分。为此,我需要一个完整的标记列表。 我找了很多,但我只能找到像酒吧、高尔夫球场等感兴趣的地方的标记。 提前致谢:) 编辑:为了进一步澄清我的需求:谷歌地图API包含“html_instructi
-
底部导航视图为空
但是,当我初始化BottomNavigationView时,我会得到: 我正在从一个片段初始化BottomNativigationView。我猜这就是问题所在,但我想不出解决办法。 下面是为片段设置导航的活动的BottomNavigationView xml。
-
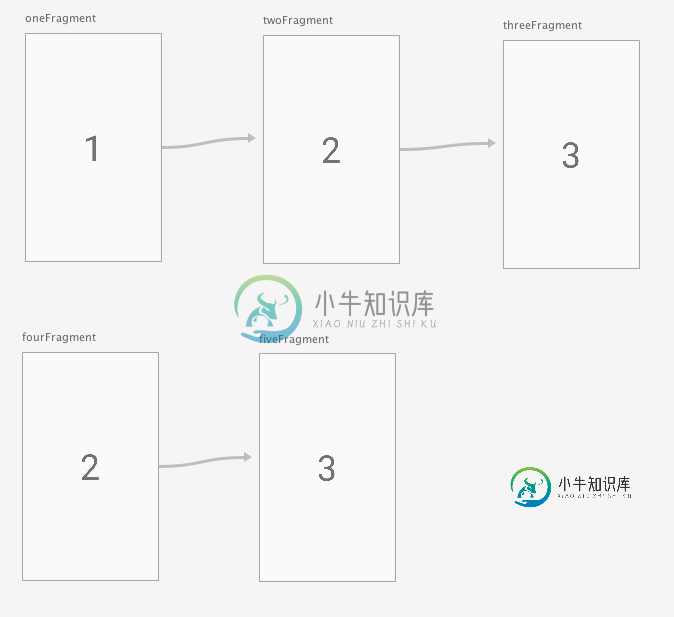 喷气背包条件导航
喷气背包条件导航我想根据条件更改我的开始导航片段。我的起始片段可以是片段1或片段2。有没有办法实现它?
-
导航架构组件-活动
我一直在遵循导航架构组件中的文档,以了解这个新的导航系统是如何工作的。 要从一个屏幕到另一个屏幕进行/返回,您需要一个实现接口的组件。 NavHost是一个空视图,当用户在应用程序中导航时,目的地会随之交换。 但是,似乎目前只有片段实现了< code>NavHost 导航架构组件的默认NavHost实现是NavHostFragment。 所以,我的问题是: > < li> 即使我有一个可以用< c
-
底部导航不起作用?
-
导航Stanford CoreNLP解析结果
-
碎片管理-导航抽屉
我有一个关于片段管理的问题。 我已经编写了一个基于碎片的抽屉活动。每次点击菜单项后,您都会看到一个空片段。 我如何实现这一点?
-
mapbox添加导航依赖项
-
7.3.6 导航之激光雷达
7.3.6 导航之激光雷达 激光雷达相关消息是:sensor_msgs/LaserScan,调用rosmsg info sensor_msgs/LaserScan显示消息内容如下: std_msgs/Header header uint32 seq time stamp string frame_id float32 angle_min #起始扫描角度(rad) float32 ang
-
7.3.3 导航之坐标变换
7.3.3 导航之坐标变换 坐标变换相关消息是: tf/tfMessage,调用rosmsg info tf/tfMessage 显示消息内容如下: geometry_msgs/TransformStamped[] transforms #包含了多个坐标系相对关系数据的数组 std_msgs/Header header uint32 seq time stamp str
-
7.2.3 导航实现03_定位
7.2.3 导航实现03_定位 所谓定位就是推算机器人自身在全局地图中的位置,当然,SLAM中也包含定位算法实现,不过SLAM的定位是用于构建全局地图的,是属于导航开始之前的阶段,而当前定位是用于导航中,导航中,机器人需要按照设定的路线运动,通过定位可以判断机器人的实际轨迹是否符合预期。在ROS的导航功能包集navigation中提供了 amcl 功能包,用于实现导航中的机器人定位。 1.amcl
-
7.2.1 导航实现01_SLAM 建图
7.2.1 导航实现01_SLAM建图 SLAM算法有多种,当前我们选用gmapping,后续会再介绍其他几种常用的SLAM实现。 1.gmapping简介 gmapping 是ROS开源社区中较为常用且比较成熟的SLAM算法之一,gmapping可以根据移动机器人里程计数据和激光雷达数据来绘制二维的栅格地图,对应的,gmapping对硬件也有一定的要求: 该移动机器人可以发布里程计消息 机器人需