《京东[话题]》专题
-
(Spotify iOS SDK)续订会话始终返回零会话
我正在iOS上构建一个小应用程序,使用Spotify SDK向其Web Api发出请求。问题是,我正在使用函数每当我想提出请求时,都可以续订令牌。但是对于该函数,文档中说“如果没有指定令牌刷新服务,回调将返回nil作为会话”。这就是发生在我身上的事。我总是得到一个零“续费期”(https://developer.spotify.com/ios-sdk-docs/Documents/Classes/
-
HBase与ZooKeeper建立会话并立即关闭会话
来自ZooKeeper服务器的日志:
-
将对话框强制转换为警报对话框
我在antoher的项目中有完全相同的代码,但它在这里继续崩溃。我有。我真的不确定问题出在哪里。我尝试过切换gradle版本,从切换到。不管怎样,一切都失败了
-
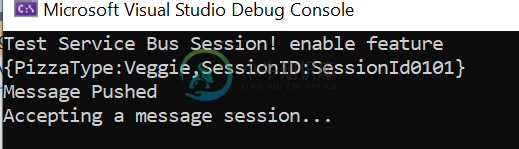 Azure服务总线|启用会话|会话未接收
Azure服务总线|启用会话|会话未接收我需要一起处理相同的消息集,为此,我尝试了Azure服务总线会话启用功能。为了测试这一点,我创建了一个非常简单的应用程序,一个消息在队列中成功提交,然而,当试图在“ReceiveSessionMessage”函数中接收消息时,消息会话不会返回,程序会在这一行之后退出。 我无法找出确切的根本原因,任何帮助都将不胜感激。谢谢 等待会话客户端。AcceptMessageSessionAsync();]
-
有状态会话与无状态会话的区别
Drools中无状态会话和有状态会话的区别是什么。我浏览了不同的文件,发现下面 无状态会话执行规则时事实的任何更改都不会被规则引擎察觉,因此如果任何规则被修改,则不会发生其他规则的重新激活。 我试图执行下面的规则,发现了相同的结果
-
EJB(有状态会话bean)与HTTP会话与现代框架之间的会话信息
在我以前做编码的时候,我主要使用无状态的会话bean,所有跨页遍历所需的信息都放在HTTP Session对象中。当时(甚至现在),我从来没有理解过EJB的“USP”对于“业务层”实现是“透明的”和“安全的”,它处理骨架和存根以及其他行话的各种方法,这些行话是以易用性/安全性为名的矫枉过正的伪装。我只是想知道,如果可以通过SLSB+HttpSession实现同样的功能,那么为什么要使用有状态会话E
-
包括标题页会话错误
我有一个头页,其中包括导航栏和必要的css的,js的。 我试图从联系页面调用标题页,但出了问题。 我在联系人页面上记录了这个错误。 警告:session_start():无法发送会话缓存限制器-已在第3行C:\xampp\htdocs\test\contact.php中发送的标头(输出从C:\xampp\htdocs\test\包含\header.php:84开始) 按照联系页面代码。 heade
-
Vaadin会话超时和UI问题
有什么想法吗?
-
Spring security+Ajax会话超时问题
我用Spring MVC构建了一个应用程序,并用Spring security进行了保护,一堆控制器是JSON rest服务,它们都受到了保护。我使用来检测AJAX请求,并在会话超时发生时发送错误代码-所有其他请求只需重定向回登录页面。 下面是Spring Security XML片段和authenticationEntryPoint java类。
-
每个制片人的Kafka话题
假设我有多个设备。每个设备都有不同类型的传感器。现在我要把每个传感器的每个设备的数据发送给Kafka。但我对Kafka的主题感到困惑。用于处理此实时数据 null 情况2:向一个主题发送数据 设备1(传感器A,B,C),设备2(传感器A,B,C)...设备....->主题 > 这不是数据瓶颈吗。因为它将表现为队列,来自某个传感器的数据将在队列中落后,并且不会被实时处理。 设备1 ->传感器A-TO
-
怎么将话题进行转发?
使用方法:进入话题-点击右上角按钮转发
-
4.5.3 编码设置话题名称
4.5.3 编码设置话题名称 话题的名称与节点的命名空间、节点的名称是有一定关系的,话题名称大致可以分为三种类型: 全局(话题参考ROS系统,与节点命名空间平级) 相对(话题参考的是节点的命名空间,与节点名称平级) 私有(话题参考节点名称,是节点名称的子级) 结合编码演示具体关系。 1.C++ 实现 演示准备: 1.初始化节点设置一个节点名称 ros::init(argc,argv,"hello"
-
4.5.1 rosrun 设置话题重映射
4.5.1 rosrun设置话题重映射 rosrun名称重映射语法: rorun 包名 节点名 话题名:=新话题名称 实现teleop_twist_keyboard与乌龟显示节点通信方案由两种: 1.方案1 将 teleop_twist_keyboard 节点的话题设置为/turtle1/cmd_vel 启动键盘控制节点:rosrun teleop_twist_keyboard teleop_tw
-
2.1.4 话题通信自定义 msg
2.1.4 话题通信自定义msg 在 ROS 通信协议中,数据载体是一个较为重要组成部分,ROS 中通过 std_msgs 封装了一些原生的数据类型,比如:String、Int32、Int64、Char、Bool、Empty.... 但是,这些数据一般只包含一个 data 字段,结构的单一意味着功能上的局限性,当传输一些复杂的数据,比如: 激光雷达的信息... std_msgs 由于描述性较差而显
-
2.1.1 话题通信理论模型
2.1.1 理论模型 话题通信实现模型是比较复杂的,该模型如下图所示,该模型中涉及到三个角色: ROS Master (管理者) Talker (发布者) Listener (订阅者) ROS Master 负责保管 Talker 和 Listener 注册的信息,并匹配话题相同的 Talker 与 Listener,帮助 Talker 与 Listener 建立连接,连接建立后,Talker 可