
TCP 命令解析实现
一、前言
从我们上一章《Memcached源码分析 - Memcached源码分析之基于Libevent的网络模型(1)》我们基本了解了Memcached的网络模型。这一章节,我们需要详细解读Memcached的命令解析。
我们回顾上一章发现Memcached会分成主线程和N个工作线程。主线程主要用于监听accpet客户端的Socket连接,而工作线程主要用于接管具体的客户端连接。
主线程和工作线程之间主要通过基于Libevent的pipe的读写事件来监听,当有连接练上来的时候,主线程会将连接交个某一个工作线程去接管,后期客户端和服务端的读写工作都会在这个工作线程中进行。
工作线程也是基于Libevent的事件的,当有读或者写的事件进来的时候,就会触发事件的回调函数。
那么Memcached是如何来解析客户端上传的命令数据报文的呢?这一章我们详细讲解命令的解析过程,下一章会讲解Memcached对客户端的回应。
二、Memcached的命令解析源码分析
1. 连接句柄数据结构conn
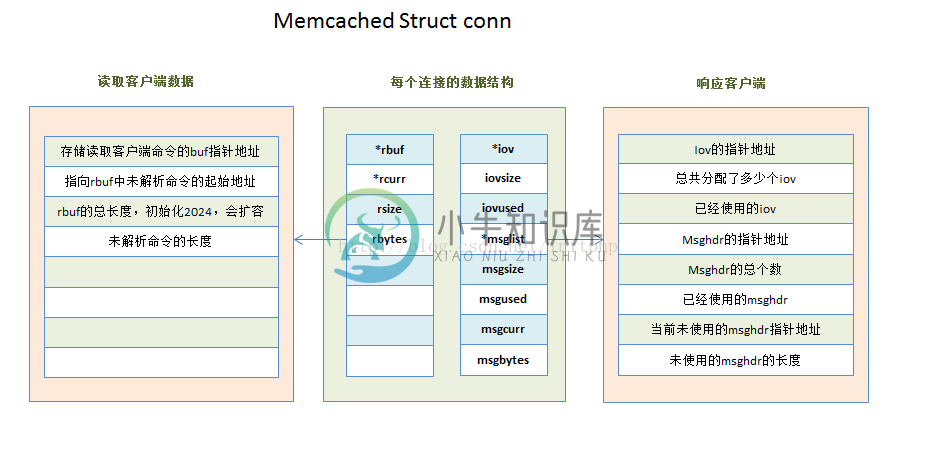
每一个连接都会有自己的一个conn数据结构。这个结构主要存储每个连接的基本信息。
这一章中用到的几个比较重要的参数:
- char * rbuf:用于存储客户端数据报文中的命令。
- int rsize:rbuf的大小。
- char * rcurr:未解析的命令的字符指针。
- int rbytes:未解析的命令的长度。
typedef struct conn conn;
struct conn {
int sfd;
sasl_conn_t *sasl_conn;
bool authenticated;
enum conn_states state;
enum bin_substates substate;
rel_time_t last_cmd_time;
struct event event;
short ev_flags;
short which; /** which events were just triggered */
char *rbuf; /** buffer to read commands into */
char *rcurr; /** but if we parsed some already, this is where we stopped */
int rsize; /** total allocated size of rbuf */
int rbytes; /** how much data, starting from rcur, do we have unparsed */
char *wbuf;
char *wcurr;
int wsize;
int wbytes;
/** which state to go into after finishing current write */
enum conn_states write_and_go;
void *write_and_free; /** free this memory after finishing writing */
char *ritem; /** when we read in an item's value, it goes here */
int rlbytes;
/* data for the nread state */
/**
* item is used to hold an item structure created after reading the command
* line of set/add/replace commands, but before we finished reading the actual
* data. The data is read into ITEM_data(item) to avoid extra copying.
*/
void *item; /* for commands set/add/replace */
/* data for the swallow state */
int sbytes; /* how many bytes to swallow */
/* data for the mwrite state */
struct iovec *iov;
int iovsize; /* number of elements allocated in iov[] */
int iovused; /* number of elements used in iov[] */
struct msghdr *msglist;
int msgsize; /* number of elements allocated in msglist[] */
int msgused; /* number of elements used in msglist[] */
int msgcurr; /* element in msglist[] being transmitted now */
int msgbytes; /* number of bytes in current msg */
item **ilist; /* list of items to write out */
int isize;
item **icurr;
int ileft;
char **suffixlist;
int suffixsize;
char **suffixcurr;
int suffixleft;
enum protocol protocol; /* which protocol this connection speaks */
enum network_transport transport; /* what transport is used by this connection */
/* data for UDP clients */
int request_id; /* Incoming UDP request ID, if this is a UDP "connection" */
struct sockaddr_in6 request_addr; /* udp: Who sent the most recent request */
socklen_t request_addr_size;
unsigned char *hdrbuf; /* udp packet headers */
int hdrsize; /* number of headers' worth of space is allocated */
bool noreply; /* True if the reply should not be sent. */
/* current stats command */
struct {
char *buffer;
size_t size;
size_t offset;
} stats;
/* Binary protocol stuff */
/* This is where the binary header goes */
protocol_binary_request_header binary_header;
uint64_t cas; /* the cas to return */
short cmd; /* current command being processed */
int opaque;
int keylen;
conn *next; /* Used for generating a list of conn structures */
LIBEVENT_THREAD *thread; /* Pointer to the thread object serving this connection */
};2. 状态机流程分析
- 当客户端和Memcached建立TCP连接后,Memcached会基于Libevent的event事件来监听客户端是否有可以读取的数据。
- 当客户端有命令数据报文上报的时候,就会触发drive_machine方法中的conn_read这个Case。
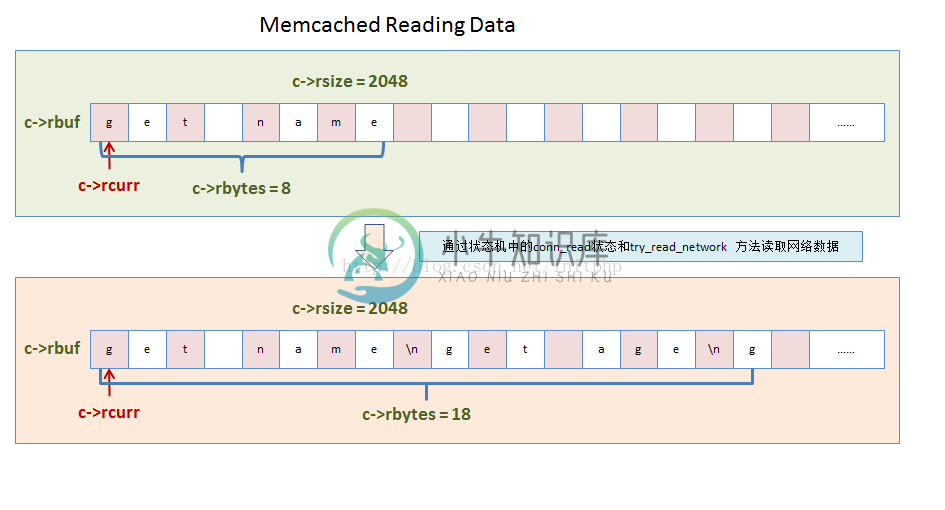
- memcached通过try_read_network方法读取客户端的报文。如果读取失败,则返回conn_closing,去关闭客户端的连接;如果没有读取到任何数据,则会返回conn_waiting,继续等待客户端的事件到来,并且退出drive_machine的循环;如果数据读取成功,则会将状态转交给conn_parse_cmd处理,读取到的数据会存储在c->rbuf容器中。
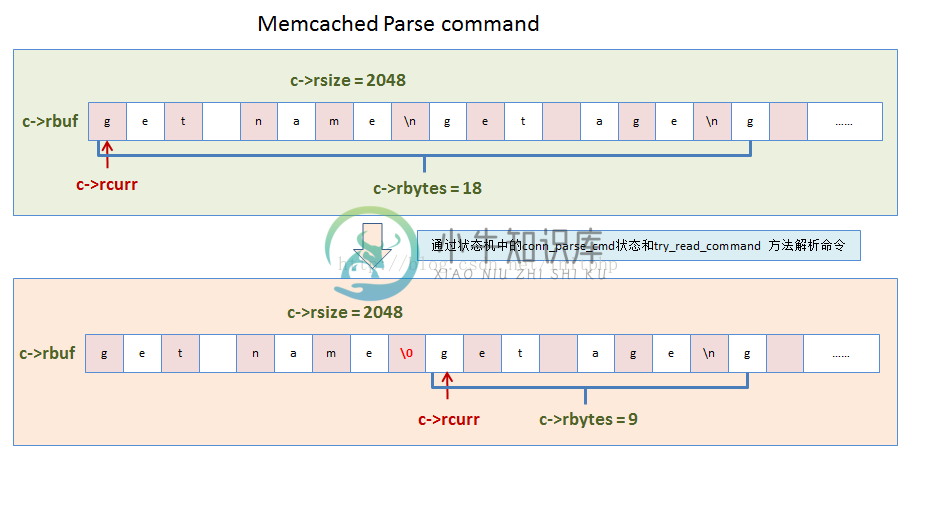
- conn_parse_cmd主要的工作就是用来解析命令。主要通过try_read_command这个方法来读取c->rbuf中的命令数据,通过\n来分隔数据报文的命令。如果c->buf内存块中的数据匹配不到\n,则返回继续等待客户端的命令数据报文到来conn_waiting;否则就会转交给process_command方法,来处理具体的命令(命令解析会通过\0符号来分隔)。
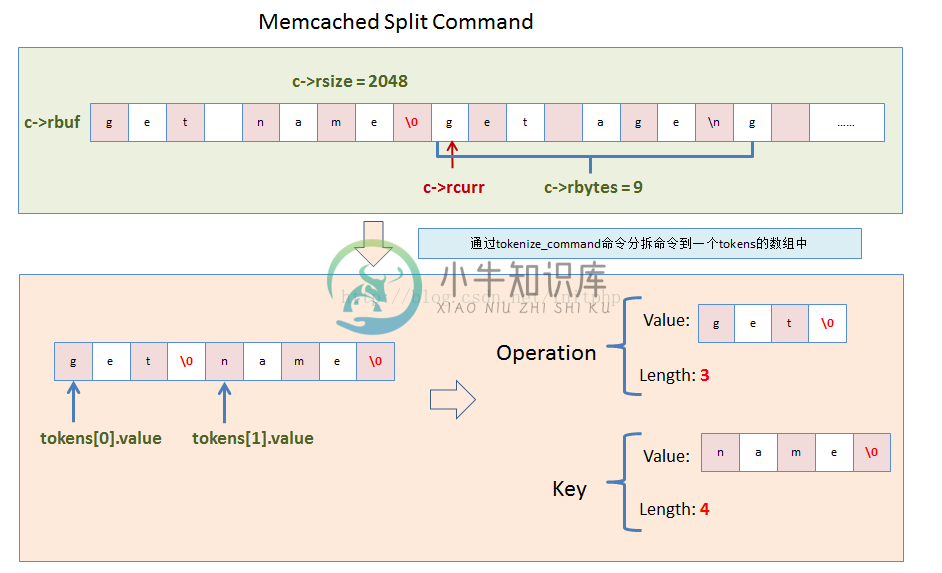
- process_command主要用来处理具体的命令。其中tokenize_command这个方法非常重要,将命令拆解成多个元素(KEY的最大长度250)。例如我们以get命令为例,最终会跳转到process_get_command这个命令 process_*_command这一系列就是处理具体的命令逻辑的。
- 我们进入process_get_command,当获取数据处理完毕之后,会转交到conn_mwrite这个状态。如果获取数据失败,则关闭连接。
- 进入conn_mwrite后,主要是通过transmit方法来向客户端提交数据。如果写数据失败,则关闭连接或退出drive_machine循环;如果写入成功,则又转交到conn_new_cmd这个状态。
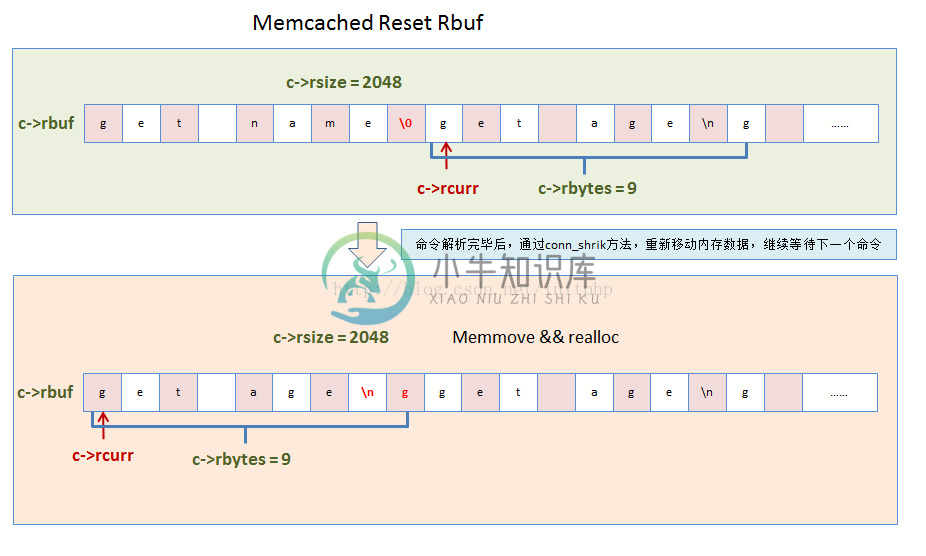
- conn_new_cmd这个状态主要是处理c->rbuf中剩余的命令。主要看一下reset_cmd_handler这个方法,这个方法回去判断c->rbytes中是否还有剩余的报文没处理,如果未处理,则转交到conn_parse_cmd(第四步)继续解析剩余命令;如果已经处理了,则转交到conn_waiting,等待新的事件到来。在转交之前,每次都会执行一次conn_shrink方法。
- conn_shrink方法主要用来处理命令报文容器c->rbuf和输出内容的容器是否数据满了?是否需要扩大buffer的大小,是否需要移动内存块。接受命令报文的初始化内存块大小2048,最大8192。

3. 命令的数据结构变化rbuf
1. 读取客户端的数据
2. 解析buf中的命令。如果遇到\n,则表明是一个命令语句的结尾标识符。
3. 命令拆分。命令解析出来之后,对命令进行分解,分解是通过空格来分离的。第一个参数一般为操作方法,第二个参数一般为KEY。
4. 内存块重设置。如果rbuf内存块使用空间不足,或者大于8k,则需要进行重新分配内存块。
4. 状态机启动drive_machine
我们上一节看到客户端连接的读写事件回调函数:event_handler,这个方法中最终调用的是drive_machine。
void event_handler(const int fd, const short which, void *arg) {
conn *c;
//组装conn结构
c = (conn *) arg;
assert(c != NULL);
c->which = which;
/* sanity */
if (fd != c->sfd) {
if (settings.verbose > 0)
fprintf(stderr, "Catastrophic: event fd doesn't match conn fd!\n");
conn_close(c);
return;
}
//最终转交给了drive_machine这个方法
drive_machine(c);
/* wait for next event */
return;
}drive_machine:drive_machine这个方法中,都是通过c->state来判断需要处理的逻辑。
- conn_listening:监听状态
- conn_waiting:等待状态
- conn_read:读取状态
- conn_parse_cmd:命令行解析
- conn_mwrite:向客户端写数据
- conn_new_cmd:解析新的命令
static void drive_machine(conn *c) {
bool stop = false;
int sfd;
socklen_t addrlen;
struct sockaddr_storage addr;
int nreqs = settings.reqs_per_event;
int res;
const char *str;
#ifdef HAVE_ACCEPT4
static int use_accept4 = 1;
#else
static int use_accept4 = 0;
#endif
assert(c != NULL);
while (!stop) {
switch (c->state) {
case conn_listening:
//.......更多代码
}我们继续看一下conn_read、conn_wait和conn_parse_cmd状态的代码。
//这边是继续等待客户端的数据报文到来
case conn_waiting:
if (!update_event(c, EV_READ | EV_PERSIST)) {
if (settings.verbose > 0)
fprintf(stderr, "Couldn't update event\n");
conn_set_state(c, conn_closing);
break;
}
//等待的过程中,将连接状态设置为读取状态,并且stop设置为true,退出while(stop)的循环
conn_set_state(c, conn_read);
stop = true;
break;
//读取数据的事件,当客户端有数据报文上传的时候,就会触发libevent的读事件
case conn_read:
//try_read_network 主要读取TCP数据
//返回try_read_result的枚举类型结构,通过这个枚举类型,来判断是否已经读取到数据,是否读取失败等情况
res = IS_UDP(c->transport) ? try_read_udp(c) : try_read_network(c);
switch (res) {
//没有读取到数据,那么继续将事件设置为等待。
//while(stop)会继续循环,去调用conn_waiting这个case
case READ_NO_DATA_RECEIVED:
conn_set_state(c, conn_waiting);
break;
//如果有数据读取到了,这个时候就需要调用conn_parse_cmd逻辑
//conn_parse_cmd:主要用来解析读取到的命令
case READ_DATA_RECEIVED:
conn_set_state(c, conn_parse_cmd);
break;
//读取失败的状态,则直接调用conn_closing 关闭客户端的连接
case READ_ERROR:
conn_set_state(c, conn_closing);
break;
case READ_MEMORY_ERROR: /* Failed to allocate more memory */
/* State already set by try_read_network */
break;
}
break;
//这边是解析Memcached的客户端命令,例如解析:set username zhuli
case conn_parse_cmd:
//try_read_command方法很关键,用来读取命令
//如果这个方法返回为0,则表示解析命令失败(因为TCP粘包拆包的原因,可能命令不完整,需要继续等待数据到来)
if (try_read_command(c) == 0) {
/* wee need more data! */
//这边的注释貌似写错误了吧,应该是we need more data!
conn_set_state(c, conn_waiting);
}
break;
5. 读取TCP网络数据try_read_network
- 这个方法主要是读取TCP网络数据。读取到的数据会放进c->rbuf的buf中。
- 如果buf没有空间存储更多数据的时候,就会触发内存块的重新分配。重新分配,memcached限制了4次,估计是担忧客户端的恶意攻击导致存储命令行数据报文的buf不断的realloc。
//这个方法是通过TCP的方式读取客户端传递过来的命令数据
static enum try_read_result try_read_network(conn *c) {
//这个方法会最终返回try_read_result的枚举类型
//默认设置READ_NO_DATA_RECEIVED:没有接受到数据
enum try_read_result gotdata = READ_NO_DATA_RECEIVED;
int res;
int num_allocs = 0;
assert(c != NULL);
//c->rcurr 存放未解析命令内容指针 c->rbytes 还有多少没解析过的数据
//c->rbuf 用于读取命令的buf,存储命令字符串的指针 c->rsize rbuf的size
//这边每次都会将前一次剩余的命令报文,移动到c->rbuf的头部。
if (c->rcurr != c->rbuf) {
if (c->rbytes != 0) /* otherwise there's nothing to copy */
memmove(c->rbuf, c->rcurr, c->rbytes);
c->rcurr = c->rbuf;
}
//循环从fd中读取数据
while (1) {
//如果buf满了,则需要重新分配一块更大的内存
//当未解析的数据size 大于等于 buf块的size,则需要重新分配
if (c->rbytes >= c->rsize) {
//最多分配4次
if (num_allocs == 4) {
return gotdata;
}
++num_allocs;
//从新分配一块新的内存块,内存大小为rsize的两倍
char *new_rbuf = realloc(c->rbuf, c->rsize * 2);
if (!new_rbuf) {
STATS_LOCK();
stats.malloc_fails++;
STATS_UNLOCK();
if (settings.verbose > 0) {
fprintf(stderr, "Couldn't realloc input buffer\n");
}
c->rbytes = 0; /* ignore what we read */
out_of_memory(c, "SERVER_ERROR out of memory reading request");
c->write_and_go = conn_closing;
return READ_MEMORY_ERROR;
}
//c->rcurr和c->rbuf指向到新的buf块
c->rcurr = c->rbuf = new_rbuf;
c->rsize *= 2; //rsize则乘以2
}
//avail可以计算出buf块中剩余的空间多大
int avail = c->rsize - c->rbytes;
//这边我们可以看到Socket的读取方法
//c->sfd为Socket的ID
//c->rbuf + c->rbytes 意思是从buf块中空余的内存地址开始存放新读取到的数据
//avail 每次接收最大能读取多大的数据
res = read(c->sfd, c->rbuf + c->rbytes, avail);
//如果接受到的结果res大于0,则说明Socket中读取到了数据
//设置成READ_DATA_RECEIVED枚举类型,表明读取到了数据
if (res > 0) {
pthread_mutex_lock(&c->thread->stats.mutex); //线程锁
c->thread->stats.bytes_read += res;
pthread_mutex_unlock(&c->thread->stats.mutex);
gotdata = READ_DATA_RECEIVED;
c->rbytes += res; //未处理的数据量 + 当前读取到的命令size
if (res == avail) {
continue;
} else {
break;
}
}
//判断读取失败的两种情况
if (res == 0) {
return READ_ERROR;
}
if (res == -1) {
if (errno == EAGAIN || errno == EWOULDBLOCK) {
break;
}
return READ_ERROR;
}
}
return gotdata;
}6. 读取rbuf中的命令try_read_command
- 这个方法主要是用来读取rbuf中的命令的。例如命令:set username zhuli\r\n get username \n
- 则会通过\n这个换行符来分隔数据报文中的命令。因为数据报文会有粘包和拆包的特性,所以只有等到命令行完整了才能进行解析。所有只有匹配到了\n符号,才能匹配一个完整的命令。
//如果我们已经在c->rbuf中有可以处理的命令行了,则就可以调用此函数来处理命令解析
static int try_read_command(conn *c) {
assert(c != NULL);
assert(c->rcurr <= (c->rbuf + c->rsize)); //这边断言
assert(c->rbytes > 0);
if (c->protocol == negotiating_prot || c->transport == udp_transport) {
if ((unsigned char) c->rbuf[0] == (unsigned char) PROTOCOL_BINARY_REQ) {
c->protocol = binary_prot;
} else {
c->protocol = ascii_prot;
}
if (settings.verbose > 1) {
fprintf(stderr, "%d: Client using the %s protocol\n", c->sfd,
prot_text(c->protocol));
}
}
//有两种模式,是否是二进制模式还是ascii模式
if (c->protocol == binary_prot) {
//更多代码
} else {
//这边主要处理非二进制模式的命令解析
char *el, *cont;
//如果c->rbytes==0 表示buf容器中没有可以处理的命令报文,则返回0
//0 是让程序继续等待接收新的客户端报文
if (c->rbytes == 0)
return 0;
//查找命令中是否有\n,memcache的命令通过\n来分割
//当客户端的数据报文过来的时候,Memcached通过查找接收到的数据中是否有\n换行符来判断收到的命令数据包是否完整
//例如命令:set username 10234344 \n get username \n
//这个命令就可以分割成两个命令,分别是set和get的命令
//el返回\n的字符指针地址
el = memchr(c->rcurr, '\n', c->rbytes);
//如果没有找到\n,说明命令不完整,则返回0,继续等待接收新的客户端数据报文
if (!el) {
//c->rbytes是接收到的数据包的长度
//这边非常有趣,如果一次接收的数据报文大于了1K,则Memcached回去判断这个请求是否太大了,是否有问题?
//然后会关闭这个客户端的链接
if (c->rbytes > 1024) {
/*
* We didn't have a '\n' in the first k. This _has_ to be a
* large multiget, if not we should just nuke the connection.
*/
char *ptr = c->rcurr;
while (*ptr == ' ') { /* ignore leading whitespaces */
++ptr;
}
if (ptr - c->rcurr > 100
|| (strncmp(ptr, "get ", 4) && strncmp(ptr, "gets ", 5))) {
conn_set_state(c, conn_closing);
return 1;
}
}
return 0;
}
//如果找到了\n,说明c->rcurr中有完整的命令了
cont = el + 1; //下一个命令开始的指针节点
//这边判断是否是\r\n,如果是\r\n,则el往前移一位
if ((el - c->rcurr) > 1 && *(el - 1) == '\r') {
el--;
}
//然后将命令的最后一个字符用 \0(字符串结束符号)来分隔
*el = '\0';
assert(cont <= (c->rcurr + c->rbytes));
c->last_cmd_time = current_time; //最后命令时间
//处理命令,c->rcurr就是命令
process_command(c, c->rcurr);
c->rbytes -= (cont - c->rcurr); //这个地方为何不这样写?c->rbytes = c->rcurr - cont
c->rcurr = cont; //将c->rcurr指向到下一个命令的指针节点
assert(c->rcurr <= (c->rbuf + c->rsize));
}
return 1;
}7. 处理命令函数process_command
这个方法主要用来处理具体的命令。将命令分解后,分发到不同的具体操作中去。
//命令处理函数
//前一个方法中,我们找到了rbuf中\n的字符,然后将其替换成\0
static void process_command(conn *c, char *command) {
//tokens结构,这边会将c->rcurr(command)命令拆分出来
//并且将命令通过空格符号来分隔成多个元素
//例如:set username zhuli,则会拆分成3个元素,分别是set和username和zhuli
//MAX_TOKENS最大值为8,说明memcached的命令行,最多可以拆分成8个元素
token_t tokens[MAX_TOKENS];
size_t ntokens;
int comm;
assert(c != NULL);
MEMCACHED_PROCESS_COMMAND_START(c->sfd, c->rcurr, c->rbytes);
if (settings.verbose > 1)
fprintf(stderr, "<%d %s\n", c->sfd, command);
/*
* for commands set/add/replace, we build an item and read the data
* directly into it, then continue in nread_complete().
*/
c->msgcurr = 0;
c->msgused = 0;
c->iovused = 0;
if (add_msghdr(c) != 0) {
out_of_memory(c, "SERVER_ERROR out of memory preparing response");
return;
}
//tokenize_command非常重要,主要就是拆分命令的
//并且将拆分出来的命令元素放进tokens的数组中
//参数:command为命令
ntokens = tokenize_command(command, tokens, MAX_TOKENS);
//tokens[COMMAND_TOKEN] COMMAND_TOKEN=0
//分解出来的命令的第一个参数为操作方法
if (ntokens >= 3
&& ((strcmp(tokens[COMMAND_TOKEN].value, "get") == 0)
|| (strcmp(tokens[COMMAND_TOKEN].value, "bget") == 0))) {
//处理get命令
process_get_command(c, tokens, ntokens, false);
} else if ((ntokens == 6 || ntokens == 7)
&& ((strcmp(tokens[COMMAND_TOKEN].value, "add") == 0 && (comm =
NREAD_ADD))
|| (strcmp(tokens[COMMAND_TOKEN].value, "set") == 0
&& (comm = NREAD_SET))
|| (strcmp(tokens[COMMAND_TOKEN].value, "replace") == 0
&& (comm = NREAD_REPLACE))
|| (strcmp(tokens[COMMAND_TOKEN].value, "prepend") == 0
&& (comm = NREAD_PREPEND))
|| (strcmp(tokens[COMMAND_TOKEN].value, "append") == 0
&& (comm = NREAD_APPEND)))) {
//处理更新命令
process_update_command(c, tokens, ntokens, comm, false);
//更多代码....
}8. 分解命令tokenize_command
- 这个方法主要用于分解命令。具体是将一个命令语句分解成多个元素。
- 例如:set username zhuli\n
- 则会分解成三个元素:set和username和zhuli这三个元素。
//拆分命令方法
static size_t tokenize_command(char *command, token_t *tokens,
const size_t max_tokens) {
char *s, *e;
size_t ntokens = 0; //命令参数游标
size_t len = strlen(command); //命令长度
unsigned int i = 0;
assert(command != NULL && tokens != NULL && max_tokens > 1);
s = e = command;
for (i = 0; i < len; i++) {
//指针不停往前走,如果遇到空格,则会停下来,将命令元素拆分出来,放进tokens这个数组中
if (*e == ' ') {
if (s != e) {
tokens[ntokens].value = s;
tokens[ntokens].length = e - s;
ntokens++;
//这边将空格替换成\0
//Memcached这边的代码写的非常的好,这边的命令进行切割的时候,并没有将内存块进行拷贝,而是在原来的内存块上进行切割
*e = '\0';
//最多8个元素
if (ntokens == max_tokens - 1) {
e++;
s = e; /* so we don't add an extra token */
break;
}
}
s = e + 1;
}
e++;
}
if (s != e) {
tokens[ntokens].value = s;
tokens[ntokens].length = e - s;
ntokens++;
}
/*
* If we scanned the whole string, the terminal value pointer is null,
* otherwise it is the first unprocessed character.
*/
tokens[ntokens].value = *e == '\0' ? NULL : e;
tokens[ntokens].length = 0;
ntokens++;
//返回值为参数个数,例如分解出3个元素,则返回3
return ntokens;
}9. get命令处理process_get_command
get的命令例子。get请求拿到Memcached Item中的数据后,又会跳转到conn_mwrite这个状态,将进入向客户端写数据的状态。
//处理GET请求的命令
static inline void process_get_command(conn *c, token_t *tokens, size_t ntokens,
bool return_cas) {
//处理GET命令
char *key;
size_t nkey;
int i = 0;
item *it;
//&tokens[0] 是操作的方法
//&tokens[1] 为key
//token_t 存储了value和length
token_t *key_token = &tokens[KEY_TOKEN];
char *suffix;
assert(c != NULL);
do {
//如果key的长度不为0
while (key_token->length != 0) {
key = key_token->value;
nkey = key_token->length;
//判断key的长度是否超过了最大的长度,memcache key的最大长度为250
//这个地方需要非常注意,我们在平常的使用中,还是要注意key的字节长度的
if (nkey > KEY_MAX_LENGTH) {
//out_string 向外部输出数据
out_string(c, "CLIENT_ERROR bad command line format");
while (i-- > 0) {
item_remove(*(c->ilist + i));
}
return;
}
//这边是从Memcached的内存存储快中去取数据
it = item_get(key, nkey);
if (settings.detail_enabled) {
//状态记录,key的记录数的方法
stats_prefix_record_get(key, nkey, NULL != it);
}
//如果获取到了数据
if (it) {
//c->ilist 存放用于向外部写数据的buf
//如果ilist太小,则重新分配一块内存
if (i >= c->isize) {
item **new_list = realloc(c->ilist,
sizeof(item *) * c->isize * 2);
if (new_list) {
c->isize *= 2;
c->ilist = new_list;
} else {
STATS_LOCK();
stats.malloc_fails++;
STATS_UNLOCK();
item_remove(it);
break;
}
}
/*
* Construct the response. Each hit adds three elements to the
* outgoing data list:
* "VALUE "
* key
* " " + flags + " " + data length + "\r\n" + data (with \r\n)
*/
//初始化返回出去的数据结构
if (return_cas) {
MEMCACHED_COMMAND_GET(c->sfd, ITEM_key(it), it->nkey,
it->nbytes, ITEM_get_cas(it));
/* Goofy mid-flight realloc. */
if (i >= c->suffixsize) {
char **new_suffix_list = realloc(c->suffixlist,
sizeof(char *) * c->suffixsize * 2);
if (new_suffix_list) {
c->suffixsize *= 2;
c->suffixlist = new_suffix_list;
} else {
STATS_LOCK();
stats.malloc_fails++;
STATS_UNLOCK();
item_remove(it);
break;
}
}
suffix = cache_alloc(c->thread->suffix_cache);
if (suffix == NULL) {
STATS_LOCK();
stats.malloc_fails++;
STATS_UNLOCK();
out_of_memory(c,
"SERVER_ERROR out of memory making CAS suffix");
item_remove(it);
while (i-- > 0) {
item_remove(*(c->ilist + i));
}
return;
}
*(c->suffixlist + i) = suffix;
int suffix_len = snprintf(suffix, SUFFIX_SIZE, " %llu\r\n",
(unsigned long long) ITEM_get_cas(it));
if (add_iov(c, "VALUE ", 6) != 0
|| add_iov(c, ITEM_key(it), it->nkey) != 0
|| add_iov(c, ITEM_suffix(it), it->nsuffix - 2) != 0
|| add_iov(c, suffix, suffix_len) != 0
|| add_iov(c, ITEM_data(it), it->nbytes) != 0) {
item_remove(it);
break;
}
} else {
MEMCACHED_COMMAND_GET(c->sfd, ITEM_key(it), it->nkey,
it->nbytes, ITEM_get_cas(it));
if (add_iov(c, "VALUE ", 6) != 0
|| add_iov(c, ITEM_key(it), it->nkey) != 0
|| add_iov(c, ITEM_suffix(it),
it->nsuffix + it->nbytes) != 0) {
item_remove(it);
break;
}
}
if (settings.verbose > 1) {
int ii;
fprintf(stderr, ">%d sending key ", c->sfd);
for (ii = 0; ii < it->nkey; ++ii) {
fprintf(stderr, "%c", key[ii]);
}
fprintf(stderr, "\n");
}
/* item_get() has incremented it->refcount for us */
pthread_mutex_lock(&c->thread->stats.mutex);
c->thread->stats.slab_stats[it->slabs_clsid].get_hits++;
c->thread->stats.get_cmds++;
pthread_mutex_unlock(&c->thread->stats.mutex);
item_update(it);
*(c->ilist + i) = it;
i++;
} else {
pthread_mutex_lock(&c->thread->stats.mutex);
c->thread->stats.get_misses++;
c->thread->stats.get_cmds++;
pthread_mutex_unlock(&c->thread->stats.mutex);
MEMCACHED_COMMAND_GET(c->sfd, key, nkey, -1, 0);
}
key_token++;
}
/*
* If the command string hasn't been fully processed, get the next set
* of tokens.
*/
//如果命令行中的命令没有全部被处理,则继续下一个命令
//一个命令行中,可以get多个元素
if (key_token->value != NULL) {
ntokens = tokenize_command(key_token->value, tokens, MAX_TOKENS);
key_token = tokens;
}
} while (key_token->value != NULL);
c->icurr = c->ilist;
c->ileft = i;
if (return_cas) {
c->suffixcurr = c->suffixlist;
c->suffixleft = i;
}
if (settings.verbose > 1)
fprintf(stderr, ">%d END\n", c->sfd);
/*
If the loop was terminated because of out-of-memory, it is not
reliable to add END\r\n to the buffer, because it might not end
in \r\n. So we send SERVER_ERROR instead.
*/
if (key_token->value != NULL || add_iov(c, "END\r\n", 5) != 0
|| (IS_UDP(c->transport) && build_udp_headers(c) != 0)) {
out_of_memory(c, "SERVER_ERROR out of memory writing get response");
} else {
//将状态修改为写,这边读取到item的数据后,又开始需要往客户端写数据了。
conn_set_state(c, conn_mwrite);
c->msgcurr = 0;
}
}10. 向客户端写数据conn_mwrite&transmit
主要用于向客户端写数据。写完数据后,如果写失败,则关闭连接;如果写成功,则会将状态修改成conn_new_cmd,继续解析c->rbuf中剩余的命令
//drive_machine方法
//这个conn_mwrite是向客户端写数据
case conn_mwrite:
if (IS_UDP(c->transport) && c->msgcurr == 0
&& build_udp_headers(c) != 0) {
if (settings.verbose > 0)
fprintf(stderr, "Failed to build UDP headers\n");
conn_set_state(c, conn_closing);
break;
}
//transmit这个方法非常重要,主要向客户端写数据的操作都在这个方法中进行
//返回transmit_result枚举类型,用于判断是否写成功,如果失败,则关闭连接
switch (transmit(c)) {
//如果向客户端发送数据成功
case TRANSMIT_COMPLETE:
if (c->state == conn_mwrite) {
conn_release_items(c);
/* XXX: I don't know why this wasn't the general case */
if (c->protocol == binary_prot) {
conn_set_state(c, c->write_and_go);
} else {
//这边是TCP的状态
//状态又会切回到conn_new_cmd这个状态
//conn_new_cmd主要是继续解析c->rbuf容器中剩余的命令参数
conn_set_state(c, conn_new_cmd);
}
} else if (c->state == conn_write) {
if (c->write_and_free) {
free(c->write_and_free);
c->write_and_free = 0;
}
conn_set_state(c, c->write_and_go);
} else {
if (settings.verbose > 0)
fprintf(stderr, "Unexpected state %d\n", c->state);
conn_set_state(c, conn_closing);
}
break;
case TRANSMIT_INCOMPLETE:
case TRANSMIT_HARD_ERROR:
break; /* Continue in state machine. */
//失败的情况
case TRANSMIT_SOFT_ERROR:
stop = true;
break;
}
break;
这个方法主要是向客户端发送数据。
//这个方法主要向客户端写数据
static enum transmit_result transmit(conn *c) {
assert(c != NULL);
if (c->msgcurr < c->msgused && c->msglist[c->msgcurr].msg_iovlen == 0) {
/* Finished writing the current msg; advance to the next. */
c->msgcurr++;
}
if (c->msgcurr < c->msgused) {
ssize_t res;
//msghdr 发送数据的结构
struct msghdr *m = &c->msglist[c->msgcurr];
//sendmsg 发送数据方法
res = sendmsg(c->sfd, m, 0);
//发送成功
if (res > 0) {
pthread_mutex_lock(&c->thread->stats.mutex);
c->thread->stats.bytes_written += res;
pthread_mutex_unlock(&c->thread->stats.mutex);
/* We've written some of the data. Remove the completed
iovec entries from the list of pending writes. */
while (m->msg_iovlen > 0 && res >= m->msg_iov->iov_len) {
res -= m->msg_iov->iov_len;
m->msg_iovlen--;
m->msg_iov++;
}
/* Might have written just part of the last iovec entry;
adjust it so the next write will do the rest. */
if (res > 0) {
m->msg_iov->iov_base = (caddr_t) m->msg_iov->iov_base + res;
m->msg_iov->iov_len -= res;
}
return TRANSMIT_INCOMPLETE;
}
if (res == -1 && (errno == EAGAIN || errno == EWOULDBLOCK)) {
if (!update_event(c, EV_WRITE | EV_PERSIST)) {
if (settings.verbose > 0)
fprintf(stderr, "Couldn't update event\n");
conn_set_state(c, conn_closing);
return TRANSMIT_HARD_ERROR;
}
return TRANSMIT_SOFT_ERROR;
}
/* if res == 0 or res == -1 and error is not EAGAIN or EWOULDBLOCK,
we have a real error, on which we close the connection */
if (settings.verbose > 0)
perror("Failed to write, and not due to blocking");
if (IS_UDP(c->transport))
conn_set_state(c, conn_read);
else
conn_set_state(c, conn_closing);
return TRANSMIT_HARD_ERROR;
} else {
return TRANSMIT_COMPLETE;
}
}11. 继续解析命令conn_new_cmd&reset_cmd_handler
继续解析c->rbuf中剩余的命令。
//处理c->rbuf中剩余的命令
case conn_new_cmd:
/* Only process nreqs at a time to avoid starving other
connections */
--nreqs;
if (nreqs >= 0) {
reset_cmd_handler(c); //会跳转到reset_cmd_handler这个方法
} else {
pthread_mutex_lock(&c->thread->stats.mutex);
c->thread->stats.conn_yields++;
pthread_mutex_unlock(&c->thread->stats.mutex);
if (c->rbytes > 0) {
/* We have already read in data into the input buffer,
so libevent will most likely not signal read events
on the socket (unless more data is available. As a
hack we should just put in a request to write data,
because that should be possible ;-)
*/
if (!update_event(c, EV_WRITE | EV_PERSIST)) {
if (settings.verbose > 0)
fprintf(stderr, "Couldn't update event\n");
conn_set_state(c, conn_closing);
break;
}
}
stop = true;
}
break;//重新设置命令handler
static void reset_cmd_handler(conn *c) {
c->cmd = -1;
c->substate = bin_no_state;
if (c->item != NULL) {
item_remove(c->item);
c->item = NULL;
}
conn_shrink(c); //这个方法是检查c->rbuf容器的大小
//如果剩余未解析的命令 > 0的话,继续跳转到conn_parse_cmd解析命令
if (c->rbytes > 0) {
conn_set_state(c, conn_parse_cmd);
} else {
//如果命令都解析完成了,则继续等待新的数据到来
conn_set_state(c, conn_waiting);
}
}12. 容器状态检测conn_shrink
这个方法主要检查命令行容器的大小。
//检查rbuf的大小
static void conn_shrink(conn *c) {
assert(c != NULL);
if (IS_UDP(c->transport))
return;
//如果bufsize大于READ_BUFFER_HIGHWAT(8192)的时候需要重新处理
//DATA_BUFFER_SIZE等于2048,所以我们可以看到之前的代码中对rbuf最多只能进行4次recalloc
if (c->rsize > READ_BUFFER_HIGHWAT && c->rbytes < DATA_BUFFER_SIZE) {
char *newbuf;
if (c->rcurr != c->rbuf)
memmove(c->rbuf, c->rcurr, (size_t) c->rbytes); //内存移动
newbuf = (char *) realloc((void *) c->rbuf, DATA_BUFFER_SIZE);
if (newbuf) {
c->rbuf = newbuf;
c->rsize = DATA_BUFFER_SIZE;
}
/* TODO check other branch... */
c->rcurr = c->rbuf;
}
if (c->isize > ITEM_LIST_HIGHWAT) {
item **newbuf = (item**) realloc((void *) c->ilist,
ITEM_LIST_INITIAL * sizeof(c->ilist[0]));
if (newbuf) {
c->ilist = newbuf;
c->isize = ITEM_LIST_INITIAL;
}
/* TODO check error condition? */
}
if (c->msgsize > MSG_LIST_HIGHWAT) {
struct msghdr *newbuf = (struct msghdr *) realloc((void *) c->msglist,
MSG_LIST_INITIAL * sizeof(c->msglist[0]));
if (newbuf) {
c->msglist = newbuf;
c->msgsize = MSG_LIST_INITIAL;
}
/* TODO check error condition? */
}
if (c->iovsize > IOV_LIST_HIGHWAT) {
struct iovec *newbuf = (struct iovec *) realloc((void *) c->iov,
IOV_LIST_INITIAL * sizeof(c->iov[0]));
if (newbuf) {
c->iov = newbuf;
c->iovsize = IOV_LIST_INITIAL;
}
/* TODO check return value */
}
}