
C#实现计算一个点围绕另一个点旋转指定弧度后坐标值的方法

本文实例讲述了C#实现计算一个点围绕另一个点旋转指定弧度后坐标值的方法。分享给大家供大家参考。具体如下:
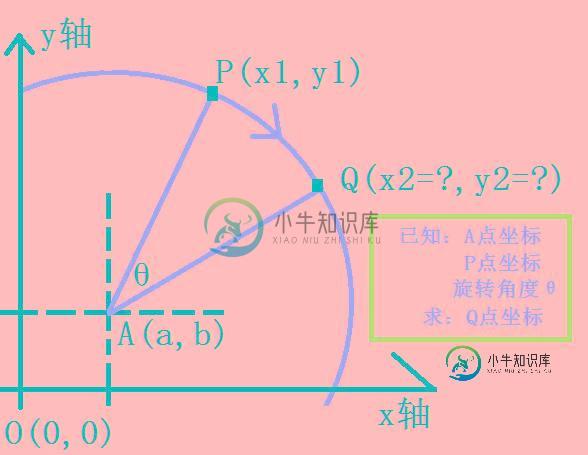
1.示例图
P(x1,y1)以点A(a,b)为圆心,旋转弧度为θ,求旋转后点Q(x2,y2)的坐标
2.实现方法
先将坐标平移,计算点(x1-a,y1-b)围绕原点旋转后的坐标,再将坐标轴平移到原状态
/// <summary>
/// 结构:表示一个点
/// </summary>
struct Point
{
//横、纵坐标
public double x, y;
//构造函数
public Point(double x, double y)
{
this.x = x;
this.y = y;
}
//该点到指定点pTarget的距离
public double DistanceTo(Point p)
{
return Math.Sqrt((p.x - x) * (p.x - x) + (p.y - y) * (p.y - y));
}
//重写ToString方法
public override string ToString()
{
return string.Concat("Point (",
this.x.ToString("#0.000"), ',',
this.y.ToString("#0.000"), ')');
}
}
/// <summary>
/// 计算点P(x,y)与X轴正方向的夹角
/// </summary>
/// <param name="x">横坐标</param>
/// <param name="y">纵坐标</param>
/// <returns>夹角弧度</returns>
private static double radPOX(double x,double y)
{
//P在(0,0)的情况
if (x == 0 && y == 0) return 0;
//P在四个坐标轴上的情况:x正、x负、y正、y负
if (y == 0 && x > 0) return 0;
if (y == 0 && x < 0) return Math.PI;
if (x == 0 && y > 0) return Math.PI / 2;
if (x == 0 && y < 0) return Math.PI / 2 * 3;
//点在第一、二、三、四象限时的情况
if (x > 0 && y > 0) return Math.Atan(y / x);
if (x < 0 && y > 0) return Math.PI - Math.Atan(y / -x);
if (x < 0 && y < 0) return Math.PI + Math.Atan(-y / -x);
if (x > 0 && y < 0) return Math.PI * 2 - Math.Atan(-y / x);
return 0;
}
/// <summary>
/// 返回点P围绕点A旋转弧度rad后的坐标
/// </summary>
/// <param name="P">待旋转点坐标</param>
/// <param name="A">旋转中心坐标</param>
/// <param name="rad">旋转弧度</param>
/// <param name="isClockwise">true:顺时针/false:逆时针</param>
/// <returns>旋转后坐标</returns>
private static Point RotatePoint(Point P, Point A,
double rad, bool isClockwise = true)
{
//点Temp1
Point Temp1 = new Point(P.x - A.x, P.y - A.y);
//点Temp1到原点的长度
double lenO2Temp1 = Temp1.DistanceTo(new Point(0, 0));
//∠T1OX弧度
double angT1OX = radPOX(Temp1.x, Temp1.y);
//∠T2OX弧度(T2为T1以O为圆心旋转弧度rad)
double angT2OX = angT1OX - (isClockwise ? 1 : -1) * rad;
//点Temp2
Point Temp2 = new Point(
lenO2Temp1 * Math.Cos(angT2OX),
lenO2Temp1 * Math.Sin(angT2OX));
//点Q
return new Point(Temp2.x + A.x, Temp2.y + A.y);
}
3.Main函数调用
static void Main(string[] args)
{
//求两点间长度
Point A = new Point(0, 0);
Point B = new Point(3, 4);
Console.WriteLine("Length of AB: " + A.DistanceTo(B));
Point P = new Point(5, -5);
Console.WriteLine(P.ToString() + '\n');
//绕原点(0,0)逆时针旋转
Console.WriteLine(RotatePoint(P, new Point(0, 0), Math.PI / 4 * 9, false));
Console.WriteLine(RotatePoint(P, new Point(0, 0), Math.PI / 4 * 10, false));
Console.WriteLine(RotatePoint(P, new Point(0, 0), Math.PI / 4 * 11, false));
Console.WriteLine(RotatePoint(P, new Point(0, 0), Math.PI / 4 * 12, false));
Console.WriteLine(RotatePoint(P, new Point(0, 0), Math.PI / 4 * 13, false));
Console.WriteLine(RotatePoint(P, new Point(0, 0), Math.PI / 4 * 14, false));
Console.WriteLine(RotatePoint(P, new Point(0, 0), Math.PI / 4 * 15, false));
Console.WriteLine(RotatePoint(P, new Point(0, 0), Math.PI / 4 * 16, false));
Console.WriteLine();
//绕点(2.5,2.5)顺时针旋转
Console.WriteLine(RotatePoint(P, new Point(2.5, 2.5), Math.PI / 4 * 1));
Console.WriteLine(RotatePoint(P, new Point(2.5, 2.5), Math.PI / 4 * 2));
Console.WriteLine(RotatePoint(P, new Point(2.5, 2.5), Math.PI / 4 * 3));
Console.WriteLine(RotatePoint(P, new Point(2.5, 2.5), Math.PI / 4 * 4));
Console.WriteLine(RotatePoint(P, new Point(2.5, 2.5), Math.PI / 4 * 5));
Console.WriteLine(RotatePoint(P, new Point(2.5, 2.5), Math.PI / 4 * 6));
Console.WriteLine(RotatePoint(P, new Point(2.5, 2.5), Math.PI / 4 * 7));
Console.WriteLine(RotatePoint(P, new Point(2.5, 2.5), Math.PI / 4 * 8));
Console.ReadLine();
}
4.运行结果:

希望本文所述对大家的C#程序设计有所帮助。
-
下面是java中的一个代码段,用于将坐标为a(10,10),B(20,10),C(20,20),D(10,20)的顶点围绕正方形的中心点旋转一个角度。正方形的边是10分。旋转角度为90度。理想情况下,旋转后A必须变成B,B必须变成C,C必须变成D,D必须变成A。 所取得的结果是不正确的 > 点A(10,10)旋转到(20,10)---正确 点B(20,10)旋转到(30,10)----不正确 nu
-
所以我想在10x10坐标系中转换不同支点之间的三个点 想象我想要什么: 这是我的第一个坐标系 翻译成: 现在,这些点必须保持在不同系统之间的同一点上,因此只有这些点的坐标应该更改。首先,我想我应该把之前的原点添加到转换后的坐标中,这对A和B是有效的,但C是不同的,也许我使用了一个错误的公式或其他东西 请你帮帮我
-
怎么求b相对于a点的弧度,js中通过鼠标点来求.
-
问题内容: 为了在地图上画一个圆,我有一个中心GLatLng(A)和一个半径(r)以米为单位。 这是一个图: 如何计算位置B的GLatLng?假设r平行于赤道。 使用GLatLng.distanceFrom()方法获得给定A和B时的半径是微不足道的-但反之则不然。似乎我需要做一些更重的数学运算。 问题答案: 我们将需要一种方法,该方法会在给定方位角和距源点的距离时返回目标点。幸运的是,克里斯·韦尼
-
我有两个矩形:红色和绿色。对于它们中的每一个,我有以下信息: 中心点( 和 坐标)。 旋转角度 宽度和高度 矩形将始终以正坐标移动。编辑:没有坐标可以是负的:矩形总是位于正坐标。因此,中心永远不会是(0,0)。 问题 我有一个起始位置。为了简化示例,假设我的红色和绿色矩形的位置如下: 现在,我使用0º和90º之间的角度φ旋转红色矩形。但是,绿色矩形需要旋转并保持其相对于红色矩形的位置。绿色矩形不仅
-
我想在x、y和z方向旋转我的模型Matix,但它以一种意想不到的方式旋转。我用Qt。 第一次旋转后,后续旋转围绕新模型矩阵的基础旋转,而我希望后续旋转围绕原点旋转。