
d3-force
这个模块实现了用以模拟粒子物理运动的 velocity Verlet 数值积分器。仿真的演化: 它假设任意单位时间步长 Δt = 1,所有的粒子的单位质量常量 m = 1。作用在每个粒子上的合力 F 相当于在单位时间 Δt 内的恒定加速度 a。并且可以简单的通过为每个粒子添加速度并计算粒子的位置来模拟仿真。
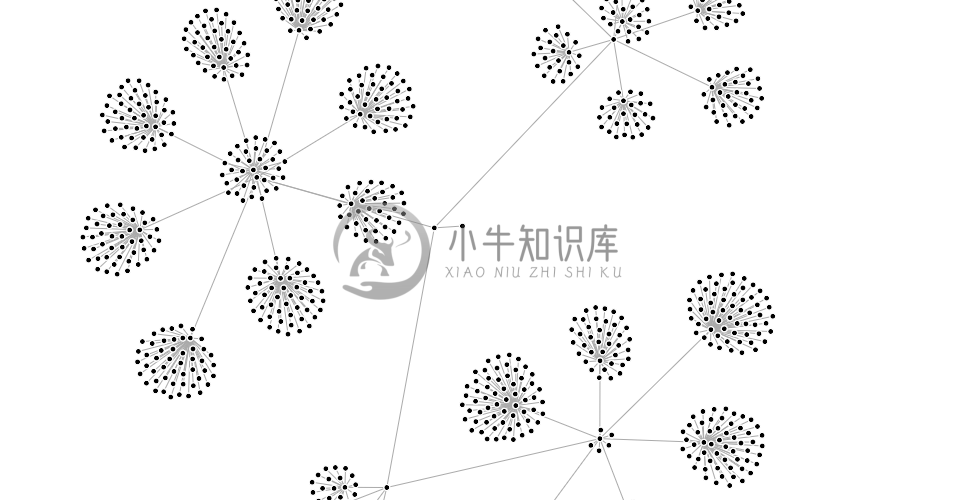
在信息可视化领域,物理仿真在研究 networks 和 hierarchies 时非常有用。

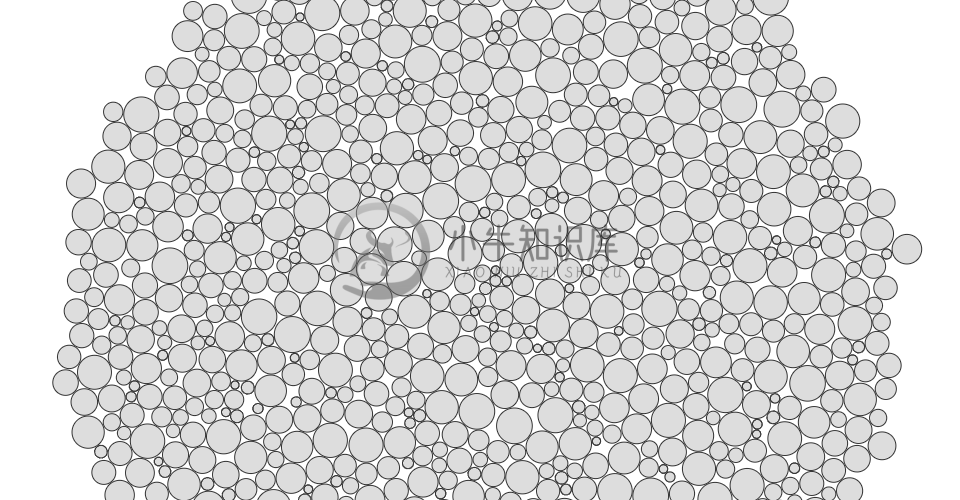
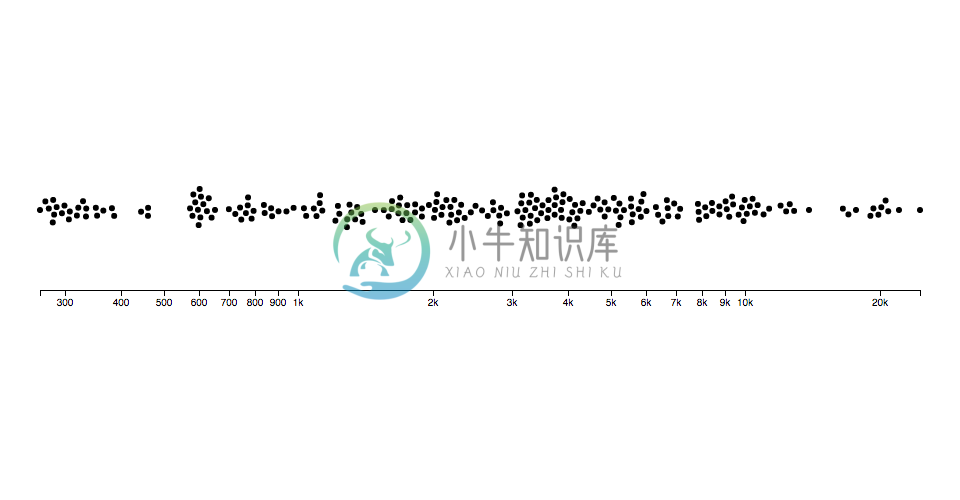
你可以使用带有碰撞检测的圆形,比如 bubble charts 或 beeswarm plots:
甚至可以用来作为一个基本的物理引擎,比如:
用本模块,为一组 Installing
NPM 安装: npm install d3-force. 也可以下载 latest release. 此外还可以直接从 d3js.org 以 standalone library 或作为 D3 4.0 的一部分直接载入. 支持 AMD, CommonJS 以及最基本的标签引入形式,如果使用标签引入形式则会暴露全局 d3_force 变量:
<script src="https://d3js.org/d3-collection.v1.min.js"></script>
<script src="https://d3js.org/d3-dispatch.v1.min.js"></script>
<script src="https://d3js.org/d3-quadtree.v1.min.js"></script>
<script src="https://d3js.org/d3-timer.v1.min.js"></script>
<script src="https://d3js.org/d3-force.v1.min.js"></script>
<script>
var simulation = d3.forceSimulation(nodes);
</script>
API Reference
Simulation
d3.forceSimulation([nodes]) <>
使用指定的 nodes 创建一个新的没有任何 forces(力学模型) 的仿真。如果没有指定 nodes 则默认为空数组。仿真会自动 starts;使用 simulation.on 来监听仿真运行过程中的 tick 事件。如果你想手动运行仿真,则需要调用 simulation.stop 然后根据需求调用 simulation.tick。
simulation.restart() <>
重新调用仿真的定时器并且返回仿真。与 simulation.alphaTarget 或 simulation.alpha 结合使用,这个方法可以再次激活仿真,在有些交互比如拖拽节点或者在使用 simulation.stop 临时暂停仿真时候使用。
simulation.stop() <>
暂停仿真内部的定时器并返回当前仿真。如果仿真内部定时器已经处于停止状态则什么都不做。这个方法在手动运行仿真时很有用,参考 simulation.tick。
simulation.tick() <>
通过 (alphaTarget - alpha) × alphaDecay 递增当前的 alpha 值。然后调用每个注册的 force 并传递新的 alpha。然后通过 velocity × velocityDecay 来递减每个节点的速度并调整节点的位置。
这个方法不会分发 events,事件仅仅在 creation 仿真或者调用 simulation.restart 的时候才会被分发。从仿真开始到结束的 tick 次数为 ⌈log(alphaMin) / log(1 - alphaDecay)⌉ 也就是默认为 300 次。
这个方法可以与 simulation.stop 结合使用来创建 static force layout(静态力学布局)。对于大规模图而言静态布局应该 in a web worker(在worker) 中计算以避免阻塞 UI 进程。
simulation.nodes([nodes]) <>
如果指定了 nodes 则将仿真的节点设置为指定的对象数组,并根据需要创建它们的位置和速度,然后 re-initializes(重新初始化) 并且绑定 forces(力模型) 返回当前仿真。如果没有指定 nodes 则返回当前仿真的节点数组。
每个 node 必须是一个对象类型,下面的几个属性将会被仿真系统添加:
index- 节点在 nodes 数组中的索引x- 节点当前的 x-坐标y- 节点当前的 y-坐标vx- 节点当前的 x-方向速度vy- 节点当前的 y-方向速度
位置 ⟨x,y⟩ 以及速度 ⟨vx,vy⟩ 随后可能被仿真中的 forces 修改. 如果 vx 或 vy 为 NaN, 则速度会被初始化为 ⟨0,0⟩. 如果 x 或 y 为 NaN, 则位置会按照 phyllotaxis arrangement(布局算法) 被初始化, 这样初始化布局是为了能使得节点在原点周围均匀分布。
如果想要某个节点固定在一个位置,可以指定以下两个额外的属性:
fx- 节点的固定 x-位置fy- 节点的固定 y-位置
每次 tick 结束后,节点的 node.x 会被重新设置为 node.fx 并且 node.vx 会被设置为 0;理 node.y 会被重新替换为 node.fy 并且 node.vy 被设置为 0;如果想要某个节点解除固定,则将 node.fx 和 node.fy 设置为 null 或者删除这两个属性。
如果指定的节点数组发生了变化,比如添加或删除了某些节点,则这个方法必须使用新的节点数组重新被调用一次以通知仿真发生了变化。仿真不会对输入数组做副本。
simulation.alpha([alpha]) <>
如果指定了 alpha 则将仿真的当前 alpha 值设置为指定的值,必须在 [0,1] 之间。如果没有指定 alpha 则返回当前的 alpha 值,默认为 1。
simulation.alphaMin([min]) <>
如果指定了 min 则将 alpha 的最小值设置为指定的值,需要在 [0, 1] 之间。如果没有指定 min 则返回当前的最小 alpha 值,默认为 0.001. 在仿真内部,会不断的减小 alpha 值直到 alpha 值小于 最小 alpha。默认的 alpha decay rate(alpha 衰减系数) 为 ~0.0228,因此会进行 300 次迭代。
simulation.alphaDecay([decay]) <>
如果指定了 decay 则将当前的 alpha 衰减系数设置为指定的值,要在[0, 1] 之间。如果没有指定 decay 则返回当前的 alpha 衰减系数,默认为 0.0228… = 1 - pow(0.001, 1 / 300),其中 0.001 是默认的 最小 alpha.
alpha 衰减系数定义了当前的 alpha 值向 target alpha 迭代快慢。默认的目标 alpha 为 0 因此从布局形式上可以认为衰减系数决定了布局冷却的快慢。衰减系数越大,布局冷却的越快,但是衰减系数大的话会引起迭代次数不够充分,导致效果不够好。衰减系数越小,迭代次数越多,最终的布局效果越好。如果想要布局永远停不下来则可以将衰减系数设置为 0;也可以设置 target alpha 大于 minimum alpha 达到相同的效果。
simulation.alphaTarget([target]) <>
如果指定了 target 则将当前的目标 alpha 设置为指定的值,需要在 [0, 1] 之间。如果没有指定 target 则返回当前默认的目标 alpha 值, 默认为 0.
simulation.velocityDecay([decay]) <>
如果指定了 decay 则设置仿真的速度衰减系数并返回仿真,范围为 [0, 1]。如果没有指定 decay 则返回当前的速度衰减系数,默认为 0.4,衰减系数类似于阻力。每次 tick 结束后每个节点的速度都会乘以 1 - decay 以降低节点的运动速度。速度衰减系数与 alpha decay rate 类似,较低的衰减系数可以使得迭代次数更多,其布局结果也会更理性,但是可能会引起数值不稳定从而导致震荡。
simulation.force(name[, force]) <>
如果指定了 force 则表示为仿真添加指定 name 的 force(力学模型) 并返回仿真。如果没有指定 force 则返回当前仿真的对应 name 的力模型,如果没有对应的 name 则返回 undefined. (默认情况下仿真没有任何力学模型,需要手动添加). 例如创建一个用来对图进行布局的仿真,可以如下:
var simulation = d3.forceSimulation(nodes)
.force("charge", d3.forceManyBody())
.force("link", d3.forceLink(links))
.force("center", d3.forceCenter());
如果要移除对应的 name 的仿真,可以为其指定 null,比如:
simulation.force("charge", null);
simulation.find(x, y[, radius]) <>
返回距离 ⟨x,y⟩ 位置最近的节点,并可以指定搜索半径 radius. 如果没有指定 radius 则默认为无穷大。如果在指定的搜索区域内没有找到节点,则返回 undefined.
simulation.on(typenames, [listener]) <>
如果指定了 listener 则将其指定的 typenames 的回调。如果对应的 typenames 已经存在事件监听器,则将其替换。如果 listener 为 null 则表示移除对应 typenames 的事件监听器。如果没有指定 listener 则返回第一个符合条件的 typenams 对应的事件监听器,当指定的事件触发时,每个回调都会被调用,回调中 this 指向仿真本身。
typenames 可以由多个由空格隔开的 typename。每个 typename 都由 type 和可选的 name 组成,用 (.) 连接。比如 tick.foo 和 tick.bar。也就是可以为同一种事件类型注册多个事件监听器。其中 type 必须为以下几种:
tick- 仿真内部定时器每次tick之后.end- 当 alpha < Forcesforce 是一个用以修改节点位置和速度的函数;在这种情况下,force 可以用来模拟电荷或重力之类的经典物理力学,也可以用来解决几何约束,例如将节点保持在边界框内或者保持节点之间的相对距离。例如将节点移动到原点 ⟨0,0⟩ 的简单力学模型可以实现如下:
function force(alpha) { for (var i = 0, n = nodes.length, node, k = alpha * 0.1; i < n; ++i) { node = nodes[i]; node.vx -= node.x * k; node.vy -= node.y * k; } }力学模型通常读取节点的当前位置 ⟨x,y⟩ 然后修改节点的速度 ⟨vx,vy⟩。但是力学图也能预测到节点的下一个位置 ⟨x + vx,y + vy⟩;这对于通过 iterative relaxation(迭代松弛) 来解决几何约束是必需的。力学模型也可以直接修改节点的位置,有时可以通过直接修改节点位置来避免向仿真中添加能量,比如在视口中重新进行仿真。
仿真通常需要多个力学模型的组合,下面是内置的几种力学模型:
- Centering
centerforce (中心力) 可以将所有的节点的中心一致的向指定的位置 ⟨Collisioncollision力模型将节点视为具有一定 radius 的圆,而不是点,并且阻止节点之间的重叠。从形式上来说,假设节点 a 和节点 b 是两个独立的节点,则 a 和 b 之间最小距离为 radius(a) + radius(b)。为减少抖动,默认情况下,碰撞检测是一个可配置 strength 和 iteration count 的软约束。d3.forceCollide([radius]) <>
根据指定的 radius 创建一个新的圆的碰撞检测。如果没有指定 radius 则默认所有的节点半径都为 1.
collide.radius([radius]) <>
如果指定的 radius 则表示设置节点半径访问器,radius 可以是一个数值或者方法,如果是方法则会为每个节点调用,并返回碰撞检测力模型。如果没有指定 radius 则返回当前的 radius 访问器,默认为:
function radius() { return 1; }半径访问器为仿真中的每个节点调用并传递当前的节点 node 以及基于 0 的 index。其返回值在内部被保存,这样的话每个节点的半径仅在初始化以及使用新的半径访问器时才会被调用,而不是每次应用时候重新计算。
collide.strength([strength]) <>
如果指定了 strength 则将碰撞强度设置为指定的数值,强度范围为 [0, 1]。并返回当前碰撞力模型。如果没有指定 strength 则返回当前的碰撞强度,默认为
0.7.重叠的节点通过迭代松弛来解决。对于每个节点,将确定在下一次
tick时候重叠(使用预期位置 ⟨x + vx,y + vy⟩ )的其他节点。然后节点的速度会被修改以避免重叠。速度的变化会受 strength 的影响,这样仿真的重叠问题可以得到一个比较稳定的解。collide.iterations([iterations]) <>
如果指定了 iterations 则将每次应用碰撞检测力模型时候的迭代次数设置为指定的数值。如果没有指定 iterations 则返回当前的迭代次数,默认为 1。迭代次数越大,最终的布局越优,但是会增加程序运行上的消耗。
Links
link froce(弹簧模型) 可以根据 link distance 将有关联的两个节点拉近或者推远。力的强度与被链接两个节点的距离成比例,类似弹簧力。d3.forceLink([links]) <>
根据指定的 links 以及默认参数创建一个弹簧力模型。如果没有指定 links 则默认为空数组。
link.links([links]) <>
如果指定了 links 则将其设置为该弹簧力模型的关联边数组,并重新计算每个边的 distance 和 strength 参数,返回当前力模型。如果没有指定 links 则返回当前力模型的边数组,默认为空。
每个边都是都是一个包含以下属性的对象:
source- 边的源节点; 参考 simulation.nodestarget- 边的目标节点; 参考 simulation.nodesindex- 基于 0 的在 links 中的索引, 会自动分配
为方便起见,边的源和目标节点可以在初始时使用索引或者字符串标识符,而不一定非要为对象引用。参考 link.id。当弹簧力被 initialized(或者重新初始化,节点或者边改变),任何不是引用的 link.source or link.target 都会根据指定的标识符被转为 node 引用形式。
如果指定的 links 数组被修改,比如添加或者移除边,这个方法必须使用新的数组重新调用一次,这个方法不会创建指定数组的副本。
link.id([id]) <>
如果指定了 id 则将节点的
id访问器设置为指定的函数并返回弹簧模型。如果 id 没有指定则返回当前的节点id访问器,默认为数值类型的节点索引 node.index:function id(d) { return d.index; }默认的
id访问器允许每个边的源节点和目标节点为基于 0 的 nodes 数组的节点索引。例如:var nodes = [ {"id": "Alice"}, {"id": "Bob"}, {"id": "Carol"} ]; var links = [ {"source": 0, "target": 1}, // Alice → Bob {"source": 1, "target": 2} // Bob → Carol ];现在可以使用字符串
id来表示节点:function id(d) { return d.id; }使用
id访问器可以将源和目标属性设置为字符串:var nodes = [ {"id": "Alice"}, {"id": "Bob"}, {"id": "Carol"} ]; var links = [ {"source": "Alice", "target": "Bob"}, {"source": "Bob", "target": "Carol"} ];这个方法在使用 JSON 表示图数据时特别有用,因为 JSON 数据不允许引用。参考 this example.
id访问器会在力模型初始化时为每个节点调用,与修改 nodes 或 links 一样,并传递当前节点以及基于 0 的索引。link.distance([distance]) <>
如果指定了 distance 则将距离访问器设置为指定的数值或者方法,并重新计算每个边的距离访问器,返回当前力模型。如果没有指定 distance 则返回当前的距离访问器,默认为:
function distance() { return 30; }距离访问器会为每个 link 调用,并传递 link 以及基于 0 的索引。返回数值会被存储在内部,这样只有在初始化以及重新设置新的 distance 时才会重新计算,而不会在每次应用力模型的时候重复计算。
link.strength([strength]) <>
如果指定了 strength 则将强度访问器设置为指定的数值或者方法,并重新计算每个边的强度访问器,返回当前力模型。如果没有指定 strength 则返回当前的强度访问器,默认为:
function strength(link) { return 1 / Math.min(count(link.source), count(link.target)); }其中 count(node) 是一个根据指定节点计算其出度和入度的函数。使用这种方法设置会自动降低连接到度大的节点的边的强度,有利于提高稳定性。
强度访问器会为每个 Many-Body
many-body(N-body问题,译为电荷力比较容易理解) 在所有的节点之间相互作用。如果 strength 为正可以被用来模拟重力(吸引力),如果强度为负可以用来模拟排斥力。这个力模型的实现采用四叉树以及 Barnes–Hut approximation 大大提高了性能。精确度可以使用 theta 参数自定义。与弹簧力不同的是,弹簧仅仅影响两端的节点,而电荷力是全局的: 每个节点都受到其他所有节点的影响,甚至他们处于不连通的子图。
d3.forceManyBody() <>
创建一个使用默认参数的电荷力模型。
manyBody.strength([strength]) <>
如果指定了 strength 则将强度访问器设置为指定的数值或者方法,重新评估每个节点的强度访问器并返回此电荷力。若强度为正值则表示节点之间相互吸引,负值表示节点之间相互排斥。如果没有指定 strength 则返回当前的强度访问器,默认为:
function strength() { return -30; }强度访问器会为仿真中的每个节点调用,并传递当前的节点 node 以及基于 0 的索引。返回值结果会在内部被存储,也就是只在初始化和设置新的 strength 的时候才会重新计算,而不是在每次应用力模型的时候重新计算。
manyBody.theta([theta]) <>
如果指定了 theta 则 Barnes–Hut 算法的临界阈值设置为指定的值并返回当前力模型。如果没有指定 theta 则返回当前的值,默认为
0.9.为了加快计算,这个力模型基于 Barnes–Hut approximation 进行实现,其时间复杂度为 O(n log n),其中 n 为 Positioning
x- 和 y-定位力模型可以将节点沿着指定的维度进行排列。与 radial 力类似,只不过环形力的参考位置是一个闭合的环。力的强度与节点位置到目标位置的距离成正比。虽然这些里可以定位某个单个节点,但是主要用于适用于所有(或大多数)节点的全局力布局。
d3.forceX([x]) <>
根据指定的 x 创建一个沿着 x-轴 方向的新的定位力模型。如果 x 没有指定则默认为 0.
x.strength([strength]) <>
如果指定了 strength 则将强度访问器设置为指定的数值或者方法,强度访问器会为每个节点进行调用,并返回当前力模型。strength 决定了节点 x-速度的增量: (x - node.x) × strength. 例如值为 0.1 时表示节点在每次应用时应该从当前 x-位置向目标 x-位置移动十分之一。值越大则移动的越快,但是会牺牲其他力模型或者约束。不建议使用 [0, 1] 之外的值。
如果没有指定 strength 则返回当前的强度访问器,默认为:
function strength() { return 0.1; }强度访问器会为仿真中的每个节点进行调用,并传递当前的节点 node 以及基于 0 的索引。其值会被存储在内部,也就是只在初始化或者修改 strength 时会重新计算,而不会在每次应用时都重新计算。
x.x([x]) <>
如果指定了 x 则设置 x-坐标访问器为指定的数值或者方法,并重新计算每个点的 x-访问器,并返回当前力模型。如果没有指定 x 则返回当前的 x-访问器,默认为:
function x() { return 0; }x-访问器会为仿真中的每个节点进行调用,并传递当前 node 以及基于 0 的索引。计算结果会被内部存储,只有在初始化或者重新设置 x 访问器时参会重新计算,避免在每次应用时都重新计算。
d3.forceY([y]) <>
根据指定的 y 创建一个沿着 y-轴 方向的新的定位力模型。如果 y 没有指定则默认为 0.
y.strength([strength]) <>
如果指定了 strength 则将强度访问器设置为指定的数值或者方法,强度访问器会为每个节点进行调用,并返回当前力模型。strength 决定了节点 y-速度的增量: (y - node.y) x strength. 例如值为 0.1 时表示节点在每次应用时应该从当前 y-位置向目标 y-位置移动十分之一。值越大则移动的越快,但是会牺牲其他力模型或者约束。不建议使用 [0, 1] 之外的值。
如果没有指定 strength 则返回当前的强度访问器,默认为:
function strength() { return 0.1; }强度访问器会为仿真中的每个节点进行调用,并传递当前的节点 node 以及基于 0 的索引。其值会被存储在内部,也就是只在初始化或者修改 strength 时会重新计算,而不会在每次应用时都重新计算。
y.y([y]) <>
如果指定了 y 则设置 y-坐标访问器为指定的数值或者方法,并重新计算每个节点的 y-访问器,并返回当前力模型。如果没有指定 y 则返回当前的 y-访问器,默认为:
function y() { return 0; }y-访问器会为仿真中的每个节点进行调用,并传递当前 node 以及基于 0 的索引。计算结果会被内部存储,只有在初始化或者重新设置 y 访问器时参会重新计算,避免在每次应用时都重新计算。
d3.forceRadial(radius[, x][, y]) <>
创建一沿着指定 radius、圆心坐标在 ⟨x,y⟩ 的圆环的环形布局。如果没有指定 x 和 y 则默认为 ⟨0,0⟩.
radial.strength([strength]) <>
如果指定了 strength 则将强度访问函数设置为指定的数值或者方法,并重新评估每个节点的强度访问器,返回当前力模型。strength 决定了节点的 x- 和 y-速度的增量。例如 0.1 表示每次应用力模型时从当前为值向最近的圆环上位置移动十分之一。值越大移动的越快,但是会牺牲其他力模型或者约束,因此建议使用 [0, 1] 之间的值。
如果没有指定 strength 则返回当前的强度访问器,默认为:
function strength() { return 0.1; }强度访问器会为仿真中的每个节点进行调用,并传递当前节点 node 以及基于 0 的索引。计算结果会被内部存储,只有在初始化或者重新设置新的强度访问器时才会重新评估,避免在每次应用力模型时候重复计算。
radial.radius([radius]) <>
如果指定了 radius 则将圆环的 radius 设置为指定的数值或者函数,并重新评估 radius 访问器,返回当前力模型。如果没有指定 radius 则返回当前的 radius 访问器。
radius 访问器会为仿真中的每个节点进行调用,并传递当前的节点 node 以及基于 0 的索引。计算结果会被内部存储,只有在初始化或者重新设置新的 radius 时参会重新评估,以避免在每次应用时都重新计算。
radial.x([x]) <>
如果指定了 x 则将圆环的 x-坐标设置为指定的数值并返回当前力模型。如果没有指定则返回当前 x-坐标,默认为 0。
radial.y([y]) <>
如果指定了 y 则将圆环的 y-坐标设置为指定的数值并返回当前力模型。如果没有指定则返回当前 y-坐标,默认为 0。
- Centering