
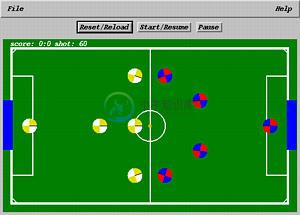
TeamBots是一个基于Java的多智能体移动机器人技术研究的应用程序和Java包的集合。TeamBots分发包是一个完整的源代码版本。模拟环境,是100%的Java。在移动机器人中执行时有时需要底层C语言库,但所有高级功能都使用Java实现。目前,TeamBots将在Nomadic Technologies' Nomad 150机器人中运行和(很快)Personal Robotics' Cye机器人。
TeamBots支持多机器人控制系统的原型设计,仿真和执行。在TeamBots开发的机器人控制系统可以使用TBSim模拟应用程序仿真运行,并使用TBHard机器人执行环境在移动机器人运行。
-
智能状态机是一个前端复杂对象优雅编程模型。 npm包中包含库和浏览器扩展 目的:更加自动和简洁的实现状态的迁移。 原理:通过装饰器,对异步函数进行包装,使得调用异步函数可以自动修改状态,并且自动实现异步调用过程中的中间状态 功能: 自动生成状态机 自动实现状态迁移 自动派发事件 可视化状态变化历史 可视化状态机图 使用例子: import { FSM, ChangeState } from 'af
-
1. 自我介绍 2. C++基础 3. static的作用 4. inline和宏定义的区别 5. 宏定义写一段加法函数 6. C++11的新特性 7. lamda写一个加法函数 8. lamda表达式编译的时候 9. 初始化列表的作用 10. 左值和右值的区别 11. 同步和异步的区别, 同步和异步,阻塞和非阻塞的区别 12. 进程和线程的概念 13. 设计模式有了解,单例模式的作用 14. s
-
概述 智能舵机 MS-12A 是 Makeblock 自主研发的新一代智能舵机,重点解决了传统舵机存在的控制复杂,角度范围小,不可连续旋转,配件单一等问题。 智能舵机 MS-12A 可以快速组装成多关节机器人:如人形机器人、多足蜘蛛机器人、机械臂等,也可以利用其可连续旋转的特性,组装成可控旋转平台,车轮驱动等机构。 配合软件,智能舵机 MS-12A 具有动作录制功能,无需编程,就能够实现复杂的动作
-
我想把我用智能手表测量的心率发送到Android移动端。我想把心率信息发到别人的手机上。(比如,当一个戴可穿戴的爷爷突然摔倒时,我想让信息去给他的监护人。) 而在我国,只有2014年出版的一本关于智能手表开发的书,没有办法将心率信息传输到移动端。在Tizen和Stack Overflowhomepage上有相关信息,但我不知道如何开发它。 溜冰场(1)从智能手表Android Wear获取数据到智
-
全程70min,无手撕 全问细节和场景题 1. 在微软做哪些事情,你复杂的那一块 2. 你用了哪些数据结构和算法,完成之后效率上的提升测试过吗 3. 调用了多少异步线程,他们之间如何通信 4. 现在有一个场景 ABCD四个线程,BCD分别写入234,A读取 现在A读取的的数据不是4,你有哪些思路 BCD执行顺序问题 A读取的数据有问题 好像让了解底层原理,例如validate每次从地址当中去读取(
-
智能计数器 一个在页面上带有动态更新数字效果的有趣元素就是智能计数器,也可以称之为里程表效果。不采用上下跳数的方式,而是快速地清点到期望的数字,这能达到一种很酷的效果。能做到这点的流行库的其中一个就是由 Hubspot 所写的 odometer 。让我们来看看如何使用短短几行 RxJS 代码来实现类似的效果。 原生 JS ( JSBin | JSFiddle ) // 工具函数 const tak