
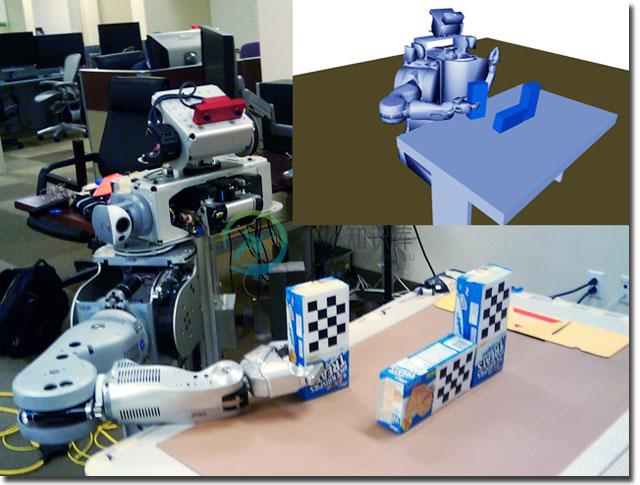
OpenRAVE 为在现实世界的机器人应用程序中测试、开发和部署运动规划算法提供了一个环境。主要关注与运动规划相关的运动学和几何信息的模拟和分析。OpenRAVE 的独立性质允许轻松集成到现有的机器人系统中。
它提供了许多命令行工具来与机器人和规划器一起工作,并且运行时核心足够小,可以在控制器和更大的框架内使用。一个重要的目标应用是工业机器人自动化。
-
需要用到某篇论文的代码,需要用到openrave等第三方库,折腾一番后记录一下 参考安装 https://scaron.info/teaching/installing-openrave-on-ubuntu-14.04.html http://openrave.org/docs/latest_stable/coreapihtml/installation_linux.html 然后测试OpenRA
-
Abstract: Doing settings of installation is always a pain. My new class in motion planning requires us to install OpenRave 0.9 on Ubuntu 14.04 but unfortunately, there is no PPA for 0.9 version so tha
-
参考:https://blog.csdn.net/Kalenee/article/details/80740258 先基于Ubuntu16.04环境安装kinetic版本的ros环境 接着安装sudo apt-get install ros-kinetic-moveit-kinematics http://wiki.ros.org/urdf https://www.guyuehome.com/37
-
1.rosrun collada_urdf urdf_to_collada jszn_robot_description_with_sensor_gazebo.xacro jszn_robot_description_with_sensor_gazebo.dae 总是出现 No link elements found in urdf file 的错误,找了很久也没有找到问题,在rviz中显示没有
-
python/bindings/CMakeFiles/pyANN_int.dir/build.make:62: recipe for target 'python/bindings/CMakeFiles/pyANN_int.dir/pyann.cpp.o' failed make[2]: *** [python/bindings/CMakeFiles/pyANN_int.dir/pyann.cpp
-
配置IKFAST求解器,装openrave装了一天终于在差三分钟十一点的时候出来了界面。ubuntu18的boost默认1.65,但是好像和openrave不匹配,换成了1.58。如果后续使用没问题就来详细填坑。
-
背景 :在ubuntu16下按照不稳定,看好多都说在16下不稳定。故在ubuntu.14下安装openrave: 参照该博客,能有效安装成功。 https://fsuarez6.github.io/blog/openrave-trusty/ 后来,在无意中发现Open rave可以在16/18上都能运行。。。。参考这位: https://www.erictaozheng.com/post/get-
-
数据概览 1.机器人问答界面 机器人问答是系统中重要的组成部分,能够帮助企业回答用户高重复、高频、无人或忙碌阶段的问答问题,较好的使用机器人问答能够回复80%以上的客户问题,通过知识维护和学习还将不断提高问答率,节省企业人工,提升准确率。 机器人问答界面包括几种类型: 单独网页标签页界面:单独网页咨询界面是一个独立网页,包含较为全面的页面信息 独立咨询控件窗口界面:单独的咨询控件窗口界面是一个悬浮
-
#软件开发笔面经# 二面和一面相比更是抽象,感觉字节系的面试官都是不愿意说话,具体体现在面试中就是多余的一个字都不说,项目也不怎么问,导致我一度以为一面挂了,也许这就是字节风格吧 项目: 介绍完之后又是象征性地问了问之前自驾工程侧的开发内容,参考一面 面试官直接表示了对算法侧的东西不太感兴趣,表示工程是这样的,算法那边只要实现就完事了,但是工程要考虑的就很多了 手撕: “给你40分钟做下这个啊”
-
对于ROS新手而言,可能会有疑问:学习机器人操作系统,实体机器人是必须的吗?答案是否定的,机器人一般价格不菲,为了降低机器人学习、调试成本,在ROS中提供了系统的机器人仿真实现,通过仿真,可以实现大部分需求,本章主要就是围绕“仿真”展开的,比如,本章会介绍: 如何创建并显示机器人模型; 如何搭建仿真环境; 如何实现机器人模型与仿真环境的交互。 本章预期的学习目标如下: 能够独立使用URDF创建机器
-
ROS 机器人操作系统 近几年发展迅速,国内也有相当一部分开发人员有意向涉足ROS,但是苦于没有低门槛的系统性教程,只能望之兴叹,基于此我们设计了一套免费、零基础、理论与实践相结合的教程,以帮助有志于机器人开发的童鞋方便快捷的上手ROS,继而推动整个行业的进步。
-
系统环境分为两部分: 时间/设备筛选 和 系统环境 (详情) 1.时间筛选 便捷按钮有今日、昨日、前日、上周 X、近七天,并且能自定义选择时间段/设备来得出想要的结果报表 2.系统环境 (详情) 1)系统环境:操作系统、浏览器、脚本、语言、时区、屏幕色彩、屏幕尺寸 2)如有需要,亦可点击下载当前报表及更多数据下载,将报表下载到个人电脑,以供存档及分析
-
让我来布置一下背景: Discord Bot Maker:我有一个升级系统,它可以根据帖子添加xp,并将其存储到JSON文件中,并且可以正常工作。一旦成员达到某个xp级别,bot将在discord中为他们分配一个新角色。如果我必须重新启动bot,所有拥有xp的成员都会在1级重新启动,使用0 xp。 不一致JSI有一个xp机器人,它根据帖子添加xp,并将信息存储在在线MySQL数据库中。当角色达到某