
如何利用Python 进行边缘检测

为何检测边缘?
我们首先应该了解的问题是:“为什么要费尽心思去做边缘检测?”除了它的效果很酷外,为什么边缘检测还是一种实用的技术?为了更好地解答这个问题,请仔细思考并对比下面的风车图片和它的“仅含边缘的图”:

可以看到,左边的原始图像有着各种各样的色彩、阴影,而右边的“仅含边缘的图”是黑白的。如果有人问,哪一张图片需要更多的存储空间,你肯定会告诉他原始图像会占用更多空间。这就是边缘检测的意义:通过对图片进行边缘检测,丢弃大多数的细节,从而得到“更轻量化”的图片。
因此,在无须保存图像的所有复杂细节,而 “只关心图像的整体形状” 的情况下,边缘检测会非常有用。
如何进行边缘检测 —— 数学
在讨论代码实现前,让我们先快速浏览一下边缘检测背后的数学原理。作为人类,我们非常擅长识别图像中的“边”,那如何让计算机做到同样的事呢?
首先,假设有一张很简单的图片,在白色背景上有一个黑色的正方形:
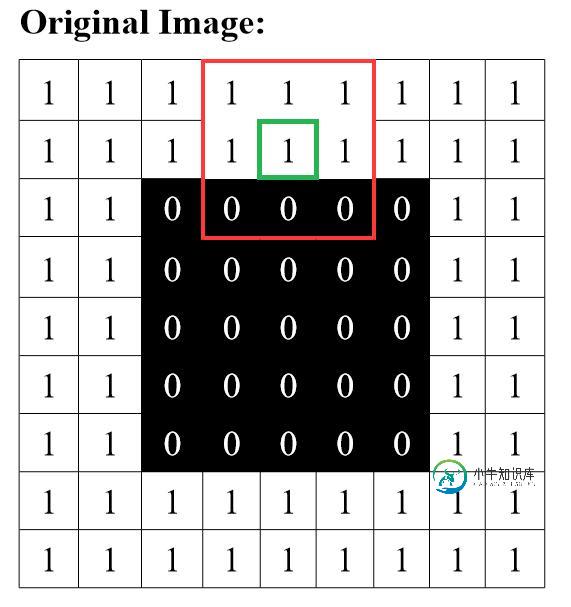
在这个例子中,由于处理的是黑白图片,因此我们可以考虑将图中的每个像素的值都用 0(黑色) 或 1(白色) 来表示。除了黑白图片,同样的理论也完全适用于彩色图像。
现在,我们需要判断上图中绿色高亮的像素是不是这个图像边缘的一部分。作为人类,我们当然可以认出它是图像的边缘;但如何让计算机利用相邻的像素来得到同样的结果呢?
我们以绿色高亮的像素为中心,设定一个 3 x 3 像素大小的小框,在图中以红色示意。接着,对这个小方框“应用”一个过滤器(filter):

上图展示了我们将要“应用”的过滤器。乍一看上去很神秘,让我们仔细研究它做的事情:当我们说 “将过滤器应用于一小块局部像素块” 时,具体是指红色框中的每个像素与过滤器中与之位置对应的像素进行相乘。因此,红色框中左上角像素值为 1,而过滤器中左上角像素值为 -1,它们相乘得到 -1,这也就是结果图中左上角像素显示的值。结果图中的每个像素都是用这种方式得到的。
下一步是对过滤结果中的所有像素值求和,得到 -4。请注意,-4 其实是我们应用这个过滤器可获得的“最小”值(因为原始图片中的像素值只能在 0 到 1 之间)。因此,当获得 -4 这个最小值的时候,我们就能知道,对应的像素点是图像中正方形顶部竖直方向边缘的一部分。
为了更好地掌握这种变换,我们可以看看将此过滤器应用于图中正方形底边上的一个像素会发生什么:
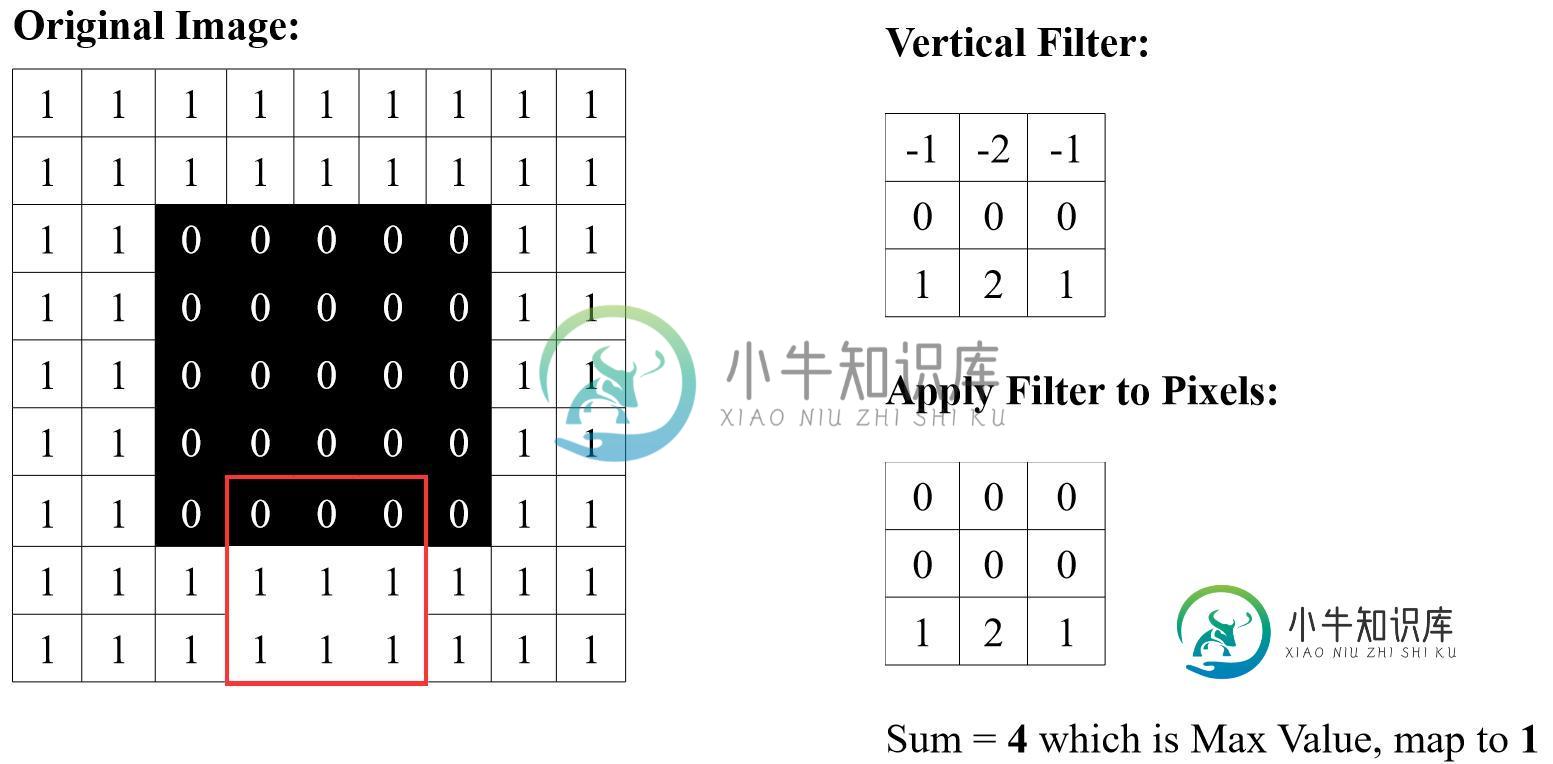
可以看到,我们得到了与前文相似的结果,相加之后得到的结果是 4,这是应用此过滤器能得到的最大值。因此,由于我们得到了 4 这一最大值,可以知道这个像素是图像中正方形底部竖直方向边缘的一部分。
为了把这些值映射到 0-1 的范围内,我们可以简单地给其加上 4 再除以 8,这样就能把 -4 映射成 0(黑色),把 4 映射成 1(白色)。因此,我们将这种过滤器称为纵向 Sobel 过滤器,可以用它轻松检测图像中垂直方向的边缘。
那如何检测水平方向的边缘呢?只需简单地将纵向过滤器进行转置(按照其数值矩阵的对角线进行翻转)就能得到一个新的过滤器,可以用于检测水平方向的边缘。
如果需要同时检测水平方向、垂直方向以及介于两者之间的边缘,我们可以把纵向过滤器得分和横向过滤器得分进行结合,这个步骤在后面的代码中将有所体现。
希望上文已经讲清楚了这些理论!下面看一看代码是如何实现的。
如何进行边缘检测 —— 代码
首先进行一些设置:
%matplotlib inline
import numpy as np
import matplotlib.pyplot as plt
# 定义纵向过滤器
vertical_filter = [[-1,-2,-1], [0,0,0], [1,2,1]]
# 定义横向过滤器
horizontal_filter = [[-1,0,1], [-2,0,2], [-1,0,1]]
# 读取纸风车的示例图片“pinwheel.jpg”
img = plt.imread('pinwheel.jpg')
# 得到图片的维数
n,m,d = img.shape
# 初始化边缘图像
edges_img = img.copy()
你可以把代码中的“pinwheel.jpg”替换成其它你想要找出边缘的图片文件!需要确保此文件和代码在同一工作目录中。
接着编写边缘检测代码本身:
%matplotlib inline
import numpy as np
import matplotlib.pyplot as plt
# 定义纵向过滤器
vertical_filter = [[-1,-2,-1], [0,0,0], [1,2,1]]
# 定义横向过滤器
horizontal_filter = [[-1,0,1], [-2,0,2], [-1,0,1]]
# 读取纸风车的示例图片“pinwheel.jpg”
img = plt.imread('pinwheel.jpg')
# 得到图片的维数
n,m,d = img.shape
# 初始化边缘图像
edges_img = img.copy()
# 循环遍历图片的全部像素
for row in range(3, n-2):
for col in range(3, m-2):
# 在当前位置创建一个 3x3 的小方框
local_pixels = img[row-1:row+2, col-1:col+2, 0]
# 应用纵向过滤器
vertical_transformed_pixels = vertical_filter*local_pixels
# 计算纵向边缘得分
vertical_score = vertical_transformed_pixels.sum()/4
# 应用横向过滤器
horizontal_transformed_pixels = horizontal_filter*local_pixels
# 计算横向边缘得分
horizontal_score = horizontal_transformed_pixels.sum()/4
# 将纵向得分与横向得分结合,得到此像素总的边缘得分
edge_score = (vertical_score**2 + horizontal_score**2)**.5
# 将边缘得分插入边缘图像中
edges_img[row, col] = [edge_score]*3
# 对边缘图像中的得分值归一化,防止得分超出 0-1 的范围
edges_img = edges_img/edges_img.max()
有几点需要注意:
在图片的边界像素上,我们无法创建完整的 3 x 3 小方框,因此在图片的四周会有一个细边框。
既然是同时检测水平方向和垂直方向的边缘,我们可以直接将原始的纵向得分与横向得分分别除以 4(而不像前文描述的分别加 4 再除以 8)。这个改动无伤大雅,反而可以更好地突出图像的边缘。
将纵向得分与横向得分结合起来时,有可能会导致最终的边缘得分超出 0-1 的范围,因此最后还需要重新对最终得分进行标准化。
在更复杂的图片上运行上述代码:

得到边缘检测的结果:

以上就是本文的全部内容了!希望你了解到了一点新知识
到此这篇关于如何利用Python 进行边缘检测的文章就介绍到这了,更多相关python 边缘检测内容请搜索小牛知识库以前的文章或继续浏览下面的相关文章希望大家以后多多支持小牛知识库!
-
本文向大家介绍Python中使用OpenCV(CV2)对图像进行边缘检测,包括了Python中使用OpenCV(CV2)对图像进行边缘检测的使用技巧和注意事项,需要的朋友参考一下 使用的模块: 为此,我们将使用opencv-python模块,该模块为我们提供了处理图像的各种功能。 下载opencv-python opencv-python模块: opencv-python是一个python库,它将
-
本文向大家介绍python实现canny边缘检测,包括了python实现canny边缘检测的使用技巧和注意事项,需要的朋友参考一下 canny边缘检测原理 canny边缘检测共有5部分组成,下边我会分别来介绍。 1 高斯模糊(略) 2 计算梯度幅值和方向。 可选用的模板:soble算子、Prewitt算子、Roberts模板等等; 一般采用soble算子,OpenCV也是如此,利用soble水平和
-
我不熟悉Python中的图像处理,我正在尝试解决一个常见问题。我有一张有人签名的照片。我想找到边缘并裁剪它以适合图像中的签名。 我尝试了Canny边缘检测和使用现有解决方案列表裁剪图像 我尝试了一些解决方案: > https://www.quora.com/How-can-I-detect-an-object-from-static-image-and-crop-it-from-the-image
-
Canny边缘检测用于检测图像中的边缘。 它接受灰度图像作为输入,并使用多级算法。可以使用类的方法在图像上执行此操作,以下是此方法的语法。 该方法接受以下参数 - image - 表示此操作的源(输入图像)的对象。 edges - 表示此操作的目标(边缘)的对象。 threshold1 - 类型为的变量表示滞后过程的第一个阈值。 threshold2 - 类型为的变量表示滞后过程的第二个阈值。 示
-
我几乎没有图像处理和识别的背景知识。我试图检测灰度图像(如肖像)上的主边缘/灰度变换。问题是在某些部分,边缘模糊(因为焦点)。我使用的是具有多个阈值的Canny边缘检测器,但我永远无法检测到这些边缘(下巴、衣服、耳朵、脸部侧面等) 边缘检测是正确的工具吗?谢谢
-
目标 在这一章中,我们将学习 Canny 边缘检测的概念 OpenCV 的 Canny 边缘检测函数:cv2.Canny() 理论基础 Canny边缘检测是一种流行的边缘检测算法。它是由 John F. Canny 于 1986 年开发的。它是一个多阶段算法,我们将学习每个阶段做了什么。 降噪 由于边缘检测容易受到图像中的噪声影响,因此首先要用5x5高斯滤波器去除图像中的噪声。我们在前面的章节已经