《影石Insta360》专题
-
如何从netcdf文件中提取投影在不规则网格上的变量的像素值?
我有一个包含以下(示例)变量的 netcdf 文件: 纬度 经度 温度 尺寸以[x,y](像素坐标)表示,主要是因为纬度和经度都是不规则网格的二维阵列。 我想提取温度的像素值,例如53.55,3.5(lat/lon度十进制坐标)。通常,对于纬度/经度的一维数组,我可以使用numpy。argmin()来查找lat/lon的索引,从而找到温度变量的像素坐标。 或者,在xarray中,我可以使用eg。
-
我的主要内容被页面上的某些东西影响了,不能正确地居中
在一个非常好的虽然是基本的教程之后,我的内容(页眉和页脚之间的文本)不会居中。 我尝试了很多关于响应图像框的教程(例如,连续3个,当调整到移动时,当你向下滚动时,它应该是1个1个),但我失败得很惨。直到现在,一切都很顺利,我感觉有更大的东西正在影响我的整个页面,我肯定这是很简单的很多人,但我哑然。 提前感谢任何能帮上忙的人,这简直要了我的命。 这是我的HTML(我正在为整个站点使用Dreamwea
-
我如何多次使用相同的按钮和动作,但影响图层而不是视图
我试图在每个函数中使用相同的按钮,但当我按下一个按钮并且它运行函数时,它只应用于最近添加的圆。我想使用相同的按钮,但当我点击一个单独的按钮,它应该运行我按下的一个动画。 这是运行代码时发生的情况的图片。当我单击任何图片按钮时,它不是在我按下的任何按钮上运行进度条动画,而是只在最后添加到视图控制器的按钮上运行它。
-
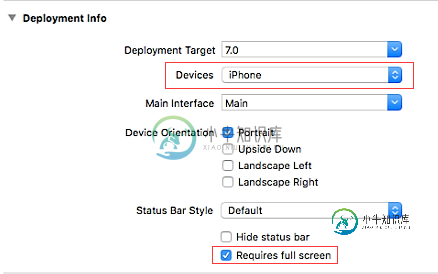 Xcode中的“需要全屏”选项对于一个仅iPhone的应用程序有什么影响?
Xcode中的“需要全屏”选项对于一个仅iPhone的应用程序有什么影响?对于iPad专用应用程序或通用应用程序,选项告诉Xcode/iOS应用程序是否支持iOS 9中引入的iPad多任务功能。但如果是iPhone专用应用程序,也会出现选项。在这种情况下,这个选项的影响是什么?
-
在Elasticsearch中,如何在不影响分数的情况下将多个过滤器与OR组合?
在 Elasticsearch 中,我想用两个与 OR 聚合的不同子句来过滤我的结果,例如,返回属性 A= 真或属性 B= true 的文档。 我一直在尝试使用布尔查询来实现这一点。我的基本查询只是中的文本搜索。如果我将这两个子句放在出现类型中,它会用AND聚合它们。如果我将这两个子句放在出现类型中,并将1设置为1,那么我得到了正确的结果。但是,匹配这两个条件的文档得分较高,因为“应该”在查询上下
-
在x509证书的签发人和主体中定义CN有什么区别和影响?[副本]
我想知道我们在CN中所放置的发行者字段和主题字段的值是不是一个相同的值?谁能再多点亮光吗?https://en.wikipedia.org/wiki/x.509
-
 前端 - chrome 检视元素的时候,图片中的阴影 和箭头表示什么含义?
前端 - chrome 检视元素的时候,图片中的阴影 和箭头表示什么含义?https://demo.cssworld.cn/new/6/2-13.php chrome 检视元素的时候,图片中的阴影 和箭头表示什么含义?
-
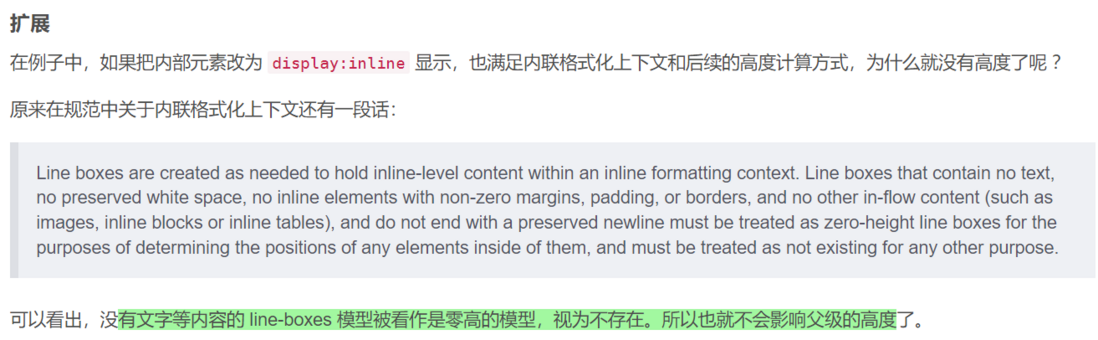 javascript - 求指导:span的display为inline-block 和inline的时候对父级元素高度的影响?
javascript - 求指导:span的display为inline-block 和inline的时候对父级元素高度的影响?这样一段代码 ,如果设置 span的display为inline-block 则div的高度为30px; 如果设置span的display为inline 则div的高度为0. 请问这是什么原因? 我的思路: 我知道行框盒子 和 幽灵空白节点。 对于display为inline-block 我能理解div的高度为什么是30px。每个行框盒子都以一个零宽度,带有元素字体以及行高属性的内框开始,我们称这
-
分区间消息分布不均匀是否会对Kafka集群的性能产生不良影响?
我正在设计高通量系统,在那里我将有几个生产者。 我的主题将被分割。生产者将发送记录作为键值对。 键将用于对数据进行分区。 消费者将被组织在消费者组中(他们将被分配相同的组id,以便他们可以同时使用来自同一主题但来自不同分区的消息)。 Kafka保证消息在单个分区中的顺序。 消费者将被分配公平份额的分区。 唯一让我担心的是,我的分区键不会以循环方式分发消息,有些分区可能比其他分区更忙。 问:不均匀的
-
Android基于OpenGL在GLSurfaceView上绘制三角形及使用投影和相机视图方法示例
本文向大家介绍Android基于OpenGL在GLSurfaceView上绘制三角形及使用投影和相机视图方法示例,包括了Android基于OpenGL在GLSurfaceView上绘制三角形及使用投影和相机视图方法示例的使用技巧和注意事项,需要的朋友参考一下 本文实例讲述了Android基于OpenGL在GLSurfaceView上绘制三角形及使用投影和相机视图方法。分享给大家供大家参考,具体如下
-
在Spring Data JPA中,如何通过分页按别名对SELECT子句中的投影进行排序?
我创建了这两个实体来证明我的问题: 业主ntity.java: 子实体。java: 我想写一个查询,显示来自OwnerEntity和一个连接的ChildEntity的信息。我创建了一个投影: 所有者权益项目。java: 我的JPA假设: 现在,当我运行这个简单的测试时: 我收到以下错误: 我还检查了日志中生成的JQPL: 如您所见,Spring Data Jpa从from子句中附加了第一个实体别名
-
ORC/Parquet文件格式的巨大配置单元表中的一列具有相同值的影响
null
-
我应该在什么时候进行延迟加载,这将如何影响谷歌搜索结果?
我正在考虑跳入“响应式网页设计的*渐进增强学校”,我正在研究延迟加载,以增加移动设备和包含大量内容的网页的页面加载时间。 我读了一些书,虽然懒散加载听起来不错,但它会被过度使用吗?我什么时候不应该使用延迟加载? 另外,如果在我向下滚动之前没有加载内容,这将如何影响谷歌搜索引擎,因为我将使用获取内容?(假设我有一张站点地图) 更新 我只是有一个想法。 如果我有一个好的站点地图,并且我在Google中
-
如果图像已经不失真,我如何从两个摄像机中得到P(投影矩阵)?
为了得到第一个/第二个摄像机的P(第一个摄像机在新的(校正)坐标系中输出3x4投影矩阵),我们可以使用以下方法:-->-->,就这样:为什么我们需要同时输入(camera_matrix1&2)和(R和T)参数来进行立体校正()? 但是如果我没有:obj_corners,img_corners,distortion_coeffs,R,t,但是我已经有两个未失真的图像和两个CameraParams,我
-
使用Spring Boot@DataJpaTest中的投影对h2数据库选择查询执行“列计数不匹配”
我有一个Spring-Boot应用程序,其中包含一些使用内容投影的本机查询。它在生产环境中运行Postgres并且运行良好。我正在尝试使用和h2内存数据库为存储库设置集成测试,但我使用内容投影的查询因驱动程序中的JdbcSQLException而失败: org.h2.jdbc.JdbcSQLException:列计数不匹配 我成功保存到TestEntityManager,所以数据库中有记录,但是我