《反卷时代》专题
-
关于使用docker-compose卷服务Django静态文件的困惑
问题内容: Docker菜鸟在这里,尝试使用Compose设置一个简单的Django项目。过,我已经在此方面取得了成功,但是这次我正在尝试一种不同的设置,但我不知道为什么它不起作用。 我有以下docker-compose.yml文件: 我的/ Dockerfile是: 我的/ docker / web / Dockerfile是: 我的/docker/web/default.conf文件是: do
-
我们可以在Docker中挂载命名卷的子目录吗?
问题内容: docker-compose文件https://docs.docker.com/compose/compose-file/#/volumes- volume-driver 显示了相对于compose文件安装主机子目录的各种方法。 例如: volumes:#只需指定一个路径,然后让Engine创建一个体积-/ var / lib / mysql #指定绝对路径映射-/ opt / dat
-
向Docker添加一个卷,但不包括一个子文件夹
问题内容: 假设我的主机上有一个Docker容器和一个文件夹。现在,如果我要对这个文件夹添加到多克尔容器的体积,那么我可以通过使用这样做在或安装它作为一个音量。 到目前为止,一切都很好。 现在包含一个子文件夹。 我想挂载到泊坞容器(无论是读写或只读不要紧,可以工作在我),但我 不 希望把它列入。我想排除这一点,我也希望Docker容器能够对此子文件夹进行更改,而不会在主机上也进行更改。 这可能吗?
-
在Windows 10上的Docker中将当前目录作为卷挂载
问题内容: 描述 我正在通过Hyper-V在Windows 10上使用Docker 1.12.5版本,并想在当前路径中将容器可执行文件用作命令。我构建了运行良好的Docker映像,但是挂载当前路径时遇到了问题。这个想法是创建一个别名并执行一个命令,以便可以在当前目录的系统范围内使用它。 设定 我有一个带文件夹“ test”的驱动器E,在其中有一个名为“ Windows主机上的文件夹”的文件夹,以显
-
如何将C:\ Users以外的卷映射到Windows上的容器?
问题内容: 我正在服务器端开发,我的工作区位于D:中,因为我不喜欢在C:上存储数据,但是找不到将d:\ Workspace映射到/ home / workspace的方法 我尝试通过以下方式创建从C:\ Users \ username到D:\ Workspace的符号链接: 将C:\ Users \ username \ Workspace映射到/ home / workspace 停止容器 重
-
如何使用卷在dockerized postgres数据库中持久化数据
我的docker组合文件有三个容器,web、nginx和Postgres。Postgres看起来是这样的: null
-
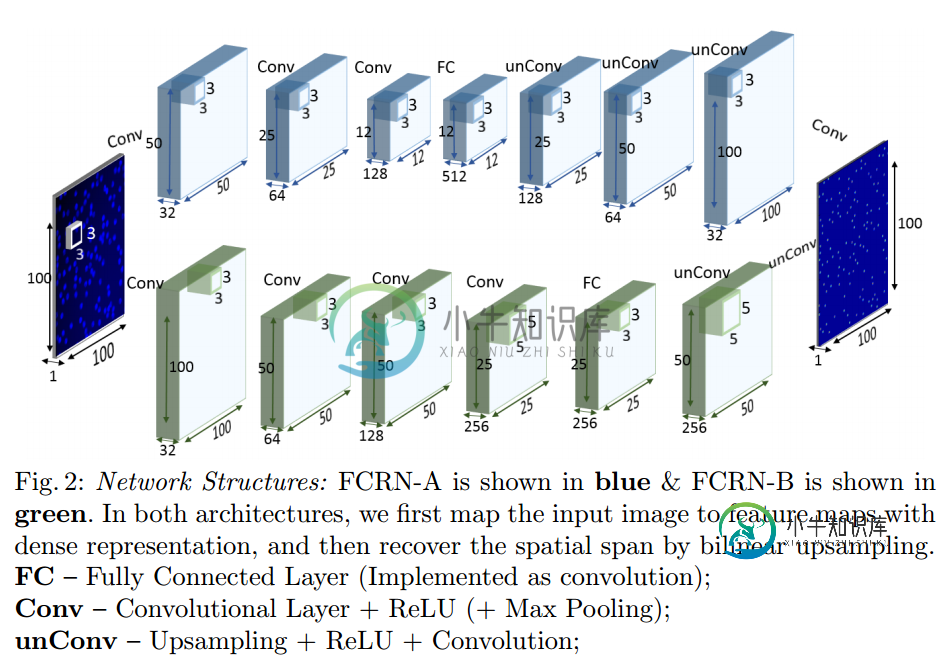 关于将卷积层实现为完全连接层的困惑
关于将卷积层实现为完全连接层的困惑我有点理解我们如何根据cs231n将全连接转换为卷积层: FC公司- 我不明白的是,在cs231n中,卷积实现的输出应该是一个维度为1x1x4096的向量,论文如何将FC的输出维度为12x12x512作为卷积实现?
-
卷积神经网络不会对测试集KERA进行分类
我有一个3-D卷积神经网络[keras, tenorflow]和3D大脑图像,分别是晚期阿尔茨海默氏症患者、早期阿尔茨海默氏症患者和健康人(3个班)。我有324张图像的训练集和74张图像的测试集。当我训练我的CNN时,我的准确率约为65-70%,但对于测试集,我只有30-40%。当我使用测试数据作为验证数据时,然后对于训练集,我的准确率也不超过37%,并且损失一直保持在同一水平。不管我改变了哪些参
-
如何在tensorflow/keras中使用常数滤波器进行卷积
在resnet的某个阶段,每个图像有6个特征,即每个示例的形状为1X8X8X6,我希望每个特征都包含4个大小为1x2x1x1的常量过滤器(DWT),步长为2,以便在下一层中获得24个特征,并将图像变为1X4X4X24。然而,我无法使用tf。nn。conv2d或tf。nn。卷积为此,conv2d说输入的第四维等于滤波器的第三维,但我如何才能做到这一点,我尝试了第一个滤波器,但即使这样也不起作用:
-
如何将Keras中的致密层转换为等效卷积层?
我想做一些类似于完全卷积网络的论文(https://people.eecs.berkeley.edu/~jonlong/long\u shelhamer\u fcn。pdf)使用Keras。我有一个网络,它最终将要素地图展平,并将其穿过几个密集的图层。我想将权重从这样的网络加载到一个网络中,在这个网络中,密集层被等效卷积所取代。 Keras附带的VGG16网络可以作为一个示例,其中最后一个MaxP
-
 基于参数共享的卷积神经网络权值计算
基于参数共享的卷积神经网络权值计算在阅读墨菲的《机器学习:概率观点》一书和迈克·奥尼尔的这篇文章时,我遇到了一些关于卷积神经网络中权重数的计算,我想了解这些计算。网络架构如下: 这是上述文章的解释: 第2层也是一个卷积层,但有50个要素地图。每个特征映射是5x5,特征映射中的每个单元是前一层所有6个特征映射对应区域的5x5卷积核,每个是13x13特征映射。因此,第2层中有5x5x50=1250个神经元,(5x5 1)x6x50=7
-
在神经网络中的卷积层之后添加新输入?
我正在强化学习训练无人机的自主导航。由于模拟环境和CNN:AlexNet,支持的问题是基于摄像头的自主导航。我想添加另外两个输入来优化导航:无人机的位置/方向和以3D矩阵形式移动的体积单位。神经网络的目的是预测无人机的下一步行动。 我想在卷积层之后添加这两个新输入,但我不知道如何集成它们。我打算展平3D矩阵,并在完全连接的层之前将其与位置/方向一起添加,但我不知道这是否是正确的方法。 整合这两种新
-
如何计算一维卷积神经网络的参数个数?
我指的是在此链接https://richliao.github.io/supervised/classification/2016/11/26/textclassifier-convolutional上实现的“使用CNN的文本分类”。在“简化卷积”一节中,他们使用了以下Keras层: Conv1D(128、5,激活='RELU')
-
FFT快速卷积:如何应用窗口使裂纹最小化
我试图对一个与头部相关的脉冲响应(L=512个样本)与一个正弦波音频信号进行快速fft卷积(fft块=1024个样本)。这里可以看到脉冲响应的曲线图: 在此之后,我将每个块513样本在时间尺度上比上一个块(跳数=0)更远的地方滑动,并将其添加到旧块中,从而得到正确的卷积输出。 在这里,您可以看到5个新增输出块的python代码(的简化版本): 在下一步中,我想用一个轻微不同的脉冲响应来卷积每个块,
-
在龙卷风中关闭所有(保持活动)插座连接?
我正在运行一组tornado实例,它处理来自一小组keep-alive连接的许多请求。当我关闭服务器进行维护时,我希望优雅地关闭keep-alive请求,这样我就可以关闭服务器。有没有办法告诉客户“嘿,这个插座正在关闭”龙卷风?我环顾四周,只是刷新连接。