《平安》专题
-
图像处理中锐化和平滑的操作
本文向大家介绍图像处理中锐化和平滑的操作相关面试题,主要包含被问及图像处理中锐化和平滑的操作时的应答技巧和注意事项,需要的朋友参考一下 参考回答: 锐化就是通过增强高频分量来减少图像中的模糊,在增强图像边缘的同时也增加了图像的噪声。 平滑与锐化相反,过滤掉高频分量,减少图像的噪声是图片变得模糊。
-
在JavaScript中使用开平方根的sqrt()方法
本文向大家介绍在JavaScript中使用开平方根的sqrt()方法,包括了在JavaScript中使用开平方根的sqrt()方法的使用技巧和注意事项,需要的朋友参考一下 这个方法返回一个数的平方根。如果数的值是负的,开方返回NaN。 语法 下面是参数的详细信息: x: 一个数字 返回值: 返回一个数字的正弦值。 例子: 这将产生以下结果:
-
在MySQL中使用窗口函数移动平均
问题内容: 我的数据集如下: 仅使用MySQL窗口函数可以做到这一点吗? 环境详细信息: 服务器版本:8.0.12 MySQL Community Server-GPL 问题答案: 您可以将Window Functions与Frames一起使用 : DB小提琴演示 细节: 表示当前行上方的两行(当前行除外)。我们在上明确定义了升序。因此,这意味着两个最接近的日期,低于当前行的日期 表示当前行。 使
-
将varchar转换为十进制棒球平均值
问题内容: 我上传了CSV文件,该文件将所有列自动转换为varchar。我需要将值22.30转换为0.223。 但是我得到了错误: 消息8115,级别16,状态8,行146 将数字转换为数据类型数字的算术溢出错误。 问题答案: 我需要将值22.30转换为0.223。 您需要将其设置为100.0,然后就可以了 返回值: 因此,您需要先对表进行处理,然后对列进行处理。 简单的方法是: 添加新列。 将数
-
 原生JS实现平滑回到顶部组件
原生JS实现平滑回到顶部组件本文向大家介绍原生JS实现平滑回到顶部组件,包括了原生JS实现平滑回到顶部组件的使用技巧和注意事项,需要的朋友参考一下 返回顶部组件是一种极其常见的网页功能,需求简单:页面滚动一定距离后,显示返回顶部的按钮,点击该按钮可以将滚动条滚回至页面开始的位置。 实现思路也很容易,只要改变document.documentElement.scrollTop或document.body.scrollTop的值
-
在javascript中由平面数组构建树数组
我有一个复杂的json文件,我必须用javascript处理它,使它具有层次结构,以便以后构建一个树。json的每个条目都有:id:唯一的id,parentId:父节点的id(如果节点是树的根,则为0)level:树中的深度级别 json数据已经“有序”了。我的意思是,一个条目的上面有一个父节点或兄弟节点,下面有一个子节点或兄弟节点。 输入: 预期产出:
-
如何用JMH测量平均冷启动时间?
在JMH(Java微基准线束)中,我们可以使用 评估JVM预热后执行的平均时间。 我们也可以使用 估计执行的冷启动时间。但这只执行一次基准测试,这可能会引入偏差。那么,是否有任何方法可以评估JMH中冷启动的平均时间?
-
 AVPlayer HLS实时流电平计(显示FFT数据)
AVPlayer HLS实时流电平计(显示FFT数据)我正在使用作为使用HTTP实时流的无线电应用程序。现在我想为该音频流实现一个电平表。最好是一个显示不同频率的电平表,但是一个简单的左/右解决方案将是一个很好的起点。 我发现了几个使用AVAudioPlayer的示例。但是我无法找到从AVPlayer获取所需信息的解决方案。 有人能想出解决我问题的办法吗? 编辑我想创建这样的东西(但更好) 编辑二 一个建议是使用MTAudioProcessingTa
-
无负载平衡器的Kubernetes入口控制器
是否可以在没有负载均衡器的情况下在库伯内特斯中使用入口控制器功能(在数字海洋中)。 是否有其他机制允许域名映射到Kubernetes服务;例如,如果我在Kubernetes集群上托管两个WordPress站点: == 域名如何在不显式输入端口号的情况下映射到容器端口8080。 感谢任何帮助。
-
http负载平衡器和运行状况检查
我发现了这个问题。。 您希望使用最少的步骤为在多个区域中运行的一组计算引擎实例配置网络负载平衡的自动修复。如果VM在3次尝试后无响应,则需要配置VM的重新创建,每次10秒。你应该怎么做? A、 使用引用现有实例组的后端配置创建HTTP负载平衡器。将运行状况检查设置为健康(HTTP) B、 使用引用现有实例组的后端配置创建HTTP负载平衡器。定义平衡模式并将最大RPS设置为10。 C.创建托管实例组
-
 gke nginx ingress创建额外的负载平衡器
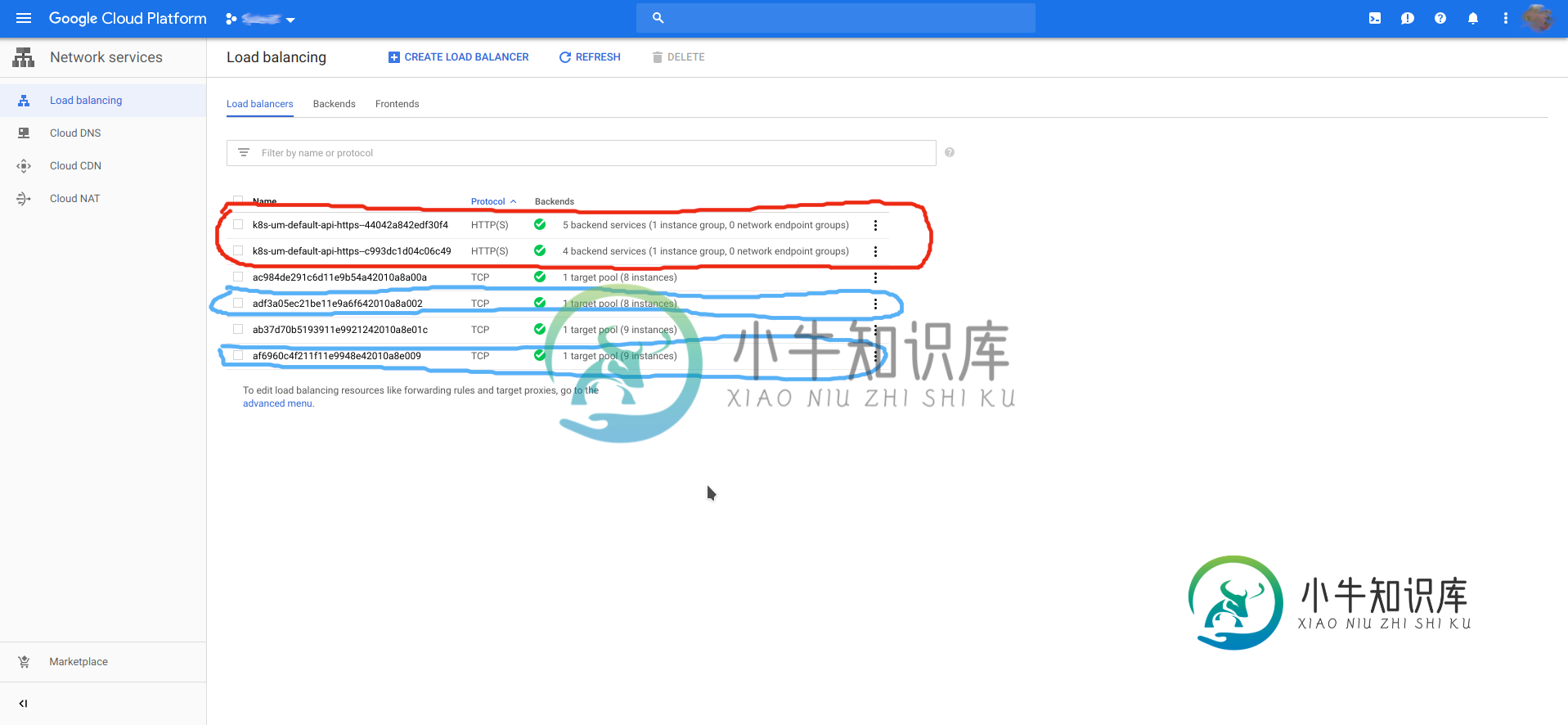
gke nginx ingress创建额外的负载平衡器有一个入口配置,比如 gke创建了nginx ingress负载平衡器,但也创建了另一个具有后端的负载平衡器,就像如果没有选择nginx,而是选择gcp作为ingress一样。 下面的屏幕截图以红色显示了两个意外的LB,蓝色显示了两个nginx ingress LB,分别用于我们的qa和prod env。 kubectl的输出获取服务 gcp gke服务视图中错误信息入口的屏幕截图 这是意料之中的
-
谷歌云负载平衡健康检查重置
Google容器引擎(kubernetes) 使用我的Web服务器应用程序(Torando/python)部署/pod kubernetes中Web服务器服务的入口-它在GCP中创建了负载均衡器 负载均衡器中的后端服务,后端是Web服务器 指向后端服务器的前端 将自定义域和子域引导到相关后端的主机和路径规则 防火墙规则设置为由入口创建 当我创建上述所有内容时,我使用正确的端口和所有内容创建了一个新
-
计算Android平板电脑上的所有图片
当调用find any pictures时,它似乎抛出了一个运行时异常,我不知道为什么它会告诉我我没有适当的权限。我已经在android manifest中包含了它提到的权限,但我不知道grantUriPermission()是什么?下面是堆栈跟踪
-
Kubernetes基础设施的选择性Kafka再平衡
一段时间后,Kubernetes controller将重新创建/重新启动失败/死亡的消费者实例,并再次执行新的重新平衡。 是否有任何方法来控制第一个重新平衡过程(当消费者死亡时)?例如,等待几秒钟而不重新平衡,直到失败的消费者返回,或者直到触发超时。如果消费者返回,是否继续基于旧的再平衡分配(即,没有新的再平衡)进行消费?
-
平行流如何“知道”使用封闭的ForkJoinpool?
在Java8中,可以设置一个自定义forkJoinpool,由并行流而不是公共池使用。 我的问题是技术上是如何发生的 流在任何方面都不知道它已提交到自定义forkJoinpool,并且无法直接访问它。那么,最终如何使用正确的线程来处理流的任务呢? 我试着看源代码,但没有用。我的最佳猜测是在提交时的某个点设置了一些threadLocal变量,然后流在稍后使用。如果是这样,为什么语言开发人员会选择这样