《开立医疗》专题
-
Brew医生说:“警告:/usr/local/include不可写。”
警告: /usr/local/include不可写。这可能发生,如果你"sudo制作安装"软件,而不是由Homebrew管理。 如果brew尝试将头文件写入此目录,则在链接步骤中安装将失败。 你可能应该 /usr/local/include 我尝试了不同的命令来解决这个问题,但我仍然被困在这里。 我在10.8.2上运行自制软件
-
脚本:医保农合接口(应用了Flash)
引用脚本的内容: ; 该脚本应使用NSIS编译器编译 ; 安装程序初始定义常量 !define PRODUCT_NAME "医保农合接口" !define PRODUCT_VERSION "9.3" !define PRODUCT_PUBLISHER "jljyczy" SetCompressor lzma Var hFlash ;定义Flash句柄变量 ; ------ MUI 现代界面定义
-
 恒瑞——医药项目经理面试经历
恒瑞——医药项目经理面试经历一面电话面(HR面) 1、谈谈对工作的认识; 2、说说对出差的看法, 3、对薪资的要求; 完了之后加微信后约了二面。 二面(部门主管面) 1、先是简单的自我介绍; 2、然后问了在学校的社团经历中收获最大的是什么, 3、为什么要投这一岗位, 4、对工作内容的认识, 5、对加班的看法; 6、老家是哪里的,家里人的看法 三面(部门经理面) 1、还是先简单的自我介绍; 2、接着问了父母是做什么
-
 【美敦力医疗OC】第二个offer 但sb学校不放
【美敦力医疗OC】第二个offer 但sb学校不放bg:三本学校 cpp方向 投的是测开岗位 公司是医疗巨头500强 offer了 但sb学校不放 不知道怎么做 佬们遇到这种情况 是选择翘课去实习吗 还是怎么做 #软件开发薪资爆料##23届找工作求助阵地#
-
Node.js和Socket.IO-如何在断开连接后立即重新连接
问题内容: 我正在使用node.js和socket.io构建一个小型原型。一切运行正常,我面临的唯一问题是我的node.js连接将断开连接,并且我被迫刷新页面以重新建立连接并重新运行。 有一种方法可以在断开事件触发后立即重新建立连接? 据我所知,这是一个普遍的问题。因此,我正在寻找解决该问题的最佳实践方法:) 非常感谢,丹 问题答案: 编辑:Socket.io已内置支持现在 当我使用socket.
-
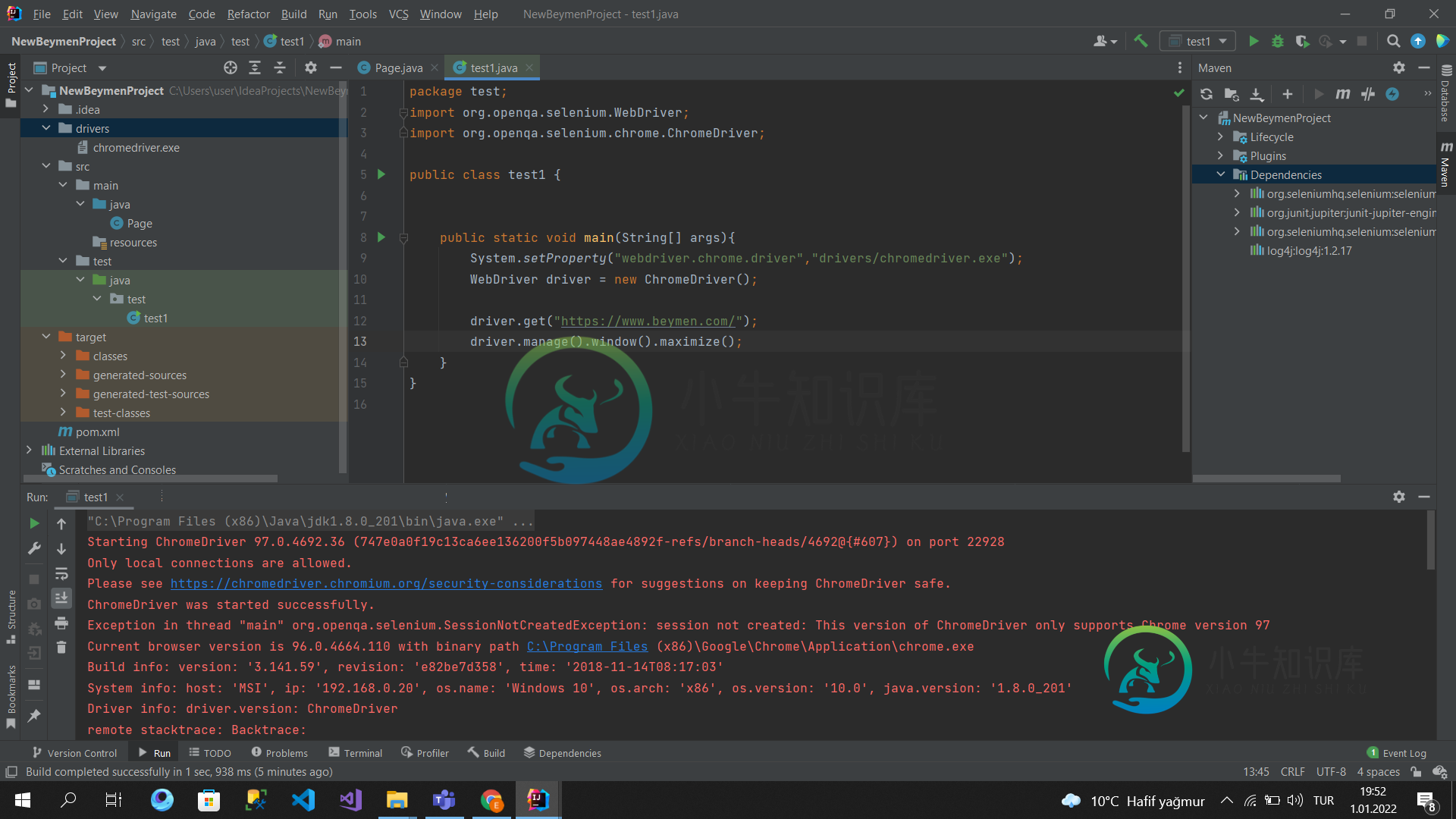 Chrome打开网页并立即关闭使用硒和Java[复制]
Chrome打开网页并立即关闭使用硒和Java[复制]我想用selenium编写java web自动化代码。虽然我添加了Chrome。exe到我的项目,我想要的页面在运行时不会打开。它立即关闭,我没有收到任何错误。
-
 Spark独立集群
Spark独立集群工人出现在图片上。为了运行我的代码,我使用了以下命令:
-
 JOGL 3D立方体
JOGL 3D立方体在本节中,我们将学习如何创建3D立方体。因此,首先创建六个相同大小的四边形,并以这样的方式放置它们,通过连接它们,我们将得到一个合适的立方体。我们还将旋转这个立方体以查看它的所有侧面。 要创建旋转立方体,请查看以下示例: 输出结果为:
-
4.5.3 独立使用
开发者可以在脱离Spring容器的情况下利用RepositoryFactory来使用Spring Data repository(比如在CDI环境下),但仍然需要将某些Spring的依赖包加到classpath中。 Example 14. Standalone usage of repository factory(独立使用) RepositoryFactorySupport factory =
-
hive 建立表格
本文向大家介绍hive 建立表格,包括了hive 建立表格的使用技巧和注意事项,需要的朋友参考一下 示例 创建具有分区的托管表并存储为序列文件。假定文件中的数据格式Ctrl-A (^A)由换行符进行字段分隔和行分隔。下表是hive.metastore.warehouse.dir在Hive仓库目录中创建的,该目录中为Hive配置文件中的键指定了值hive-site.xml。 创建具有分区的外部表并存
-
Lua 建立表格
本文向大家介绍Lua 建立表格,包括了Lua 建立表格的使用技巧和注意事项,需要的朋友参考一下 示例 创建一个空表很简单: 您还可以创建一个简单数组形式的表: 请记住,默认情况下,表索引从1开始。 也可以创建带有关联元素的表: 上面的用法是下面的语法糖。在这种情况下,键的类型为字符串。添加了以上语法,以使表显示为记录。这种记录样式的语法与使用字符串键索引表的语法并行,如“基本用法”教程中所见。 如
-
Rust 建立项目
本文向大家介绍Rust 建立项目,包括了Rust 建立项目的使用技巧和注意事项,需要的朋友参考一下 示例 除错 发布 使用--release标记进行构建可以实现某些编译器优化,而这些优化在构建调试版本时不会完成。这使代码运行得更快,但也使编译时间更长一些。为了获得最佳性能,发行版本就绪后应使用此命令。
-
立即触发addTextChangedListener
编辑:下面是list_item_view.xml
-
Django独立脚本
问题内容: 我试图从另一个python脚本访问我的Django(v1.10)应用程序数据库,但遇到了一些麻烦。 这是我的文件和文件夹结构: 根据Django的文档,我看起来像这样: 但它会生成运行时错误: 我应该注意,我的INSTALLED_APPS列表包含了它的最后一个元素。 相反,如果我尝试通过这样的配置: 我得到: 如果我进行编辑和添加,LOGGING_CONFIG=None则会遇到另一个有
-
OpenCV立体整流
如果我已经在实验中计算了相机的本质(相机矩阵和畸变系数)。 然后我把摄像机移到了现实世界的领域。我使用了现实世界中大约6-10个已知的位置,使用SolvePnP()估计相机姿态。所以我也有两个相机旋转和平移。 既然我有两个相机的相机姿态,那么我可以简单地减去我从SolvePnP得到的两个平移向量和旋转向量,并将结果传递给Stereotrety()吗?(两台摄像机使用相同的公共物点参考系)