
torch.nn
Parameters(参数)
class torch.nn.Parameter
Parameters对象是一种会被视为模块参数(module parameter)的Tensor张量。
Parameters类是Tensor 的子类, 不过相对于它的父类,Parameters类有一个很重要的特性就是当其在 Module类中被使用并被当做这个Module类的模块属性的时候,那么这个Parameters对象会被自动地添加到这个Module类的参数列表(list of parameters)之中,同时也就会被添加入此Module类的 parameters()方法所返回的参数迭代器中。而Parameters类的父类Tensor类也可以被用为构建模块的属性,但不会被加入参数列表。这样主要是因为,有时可能需要在模型中存储一些非模型参数的临时状态,比如RNN中的最后一个隐状态。而通过使用非Parameter的Tensor类,可以将这些临时变量注册(register)为模型的属性的同时使其不被加入参数列表。
Parameters:
- data (Tensor) – 参数张量(parameter tensor).
- requires_grad (bool, optional) – 参数是否需要梯度, 默认为
True。更多细节请看 如何将子图踢出反向传播过程。
Containers(容器)
Module(模块)
class torch.nn.Module
模块(Module)是所有神经网络模型的基类。
你创建模型的时候也应该继承这个类哦。
模块(Module)中还可以包含其他的模块,你可以将一个模块赋值成为另一个模块的属性,从而成为这个模块的一个子模块。而通过不断的赋值,你可以将不同的模块组织成一个树结构:
import torch.nn as nn
import torch.nn.functional as F
class Model(nn.Module):
def __init__(self):
super(Model, self).__init__()
self.conv1 = nn.Conv2d(1, 20, 5) # 当前的nn.Conv2d模块就被赋值成为Model模块的一个子模块,成为“树结构”的叶子
self.conv2 = nn.Conv2d(20, 20, 5)
def forward(self, x):
x = F.relu(self.conv1(x))
return F.relu(self.conv2(x))
通过赋值这种方式添加的子模块将会被模型注册(register),而后当调用模块的一些参数转换函数(to())的时候,子模块的参数也会一并转换。
add_module(name, module)
向当前模块添加一个子模块。 此子模块可以作为当前模块的属性被访问到,而属性名就是add_module()函数中的name参数。
add_module()函数参数:
- name (string) – 子模块的名字. 函数调用完成后,可以通过访问当前模块的此字段来访问该子模块。
- parameter (Module) – 要添加到当前模块的子模块。
apply(fn)
apply()函数的主要作用是将 fn 递归地应用于模块的所有子模块(.children()函数的返回值)以及模块自身。此函数的一个经典应用就是初始化模型的所有参数这一过程(同样参见于 torch-nn-init)。
| Parameters: | fn (Module -> None) – 要应用于所有子模型的函数 |
|---|---|
| Returns: | self |
| --- | --- |
| Return type: | Module |
| --- | --- |
例子:
>>> def init_weights(m):
print(m)
if type(m) == nn.Linear:
m.weight.data.fill_(1.0)
print(m.weight)
>>> net = nn.Sequential(nn.Linear(2, 2), nn.Linear(2, 2))
>>> net.apply(init_weights) # 将init_weights()函数应用于模块的所有子模块
Linear(in_features=2, out_features=2, bias=True)
Parameter containing:
tensor([[ 1., 1.],
[ 1., 1.]])
Linear(in_features=2, out_features=2, bias=True)
Parameter containing:
tensor([[ 1., 1.],
[ 1., 1.]])
Sequential(
(0): Linear(in_features=2, out_features=2, bias=True)
(1): Linear(in_features=2, out_features=2, bias=True)
)
Sequential(
(0): Linear(in_features=2, out_features=2, bias=True)
(1): Linear(in_features=2, out_features=2, bias=True)
)
buffers(recurse=True)
返回模块的缓冲区的迭代器
| Parameters: | recurse (bool) – 如果设置为True,产生的缓冲区迭代器会遍历模块自己与所有子模块,否则只会遍历模块的直连的成员。 |
|---|---|
| Yields: | torch.Tensor – 模型缓冲区 |
| --- | --- |
举例:
>>> for buf in model.buffers():
>>> print(type(buf.data), buf.size())
<class 'torch.FloatTensor'> (20L,)
<class 'torch.FloatTensor'> (20L, 1L, 5L, 5L)
children()
返回一个当前所有子模块的迭代器 Returns an iterator over immediate children modules.
| Yields: | Module – 子模块 |
|---|
cpu()
将模型的所有参数(parameter)和缓冲区(buffer)都转移到CPU内存中。
| Returns: | self |
|---|---|
| Return type: | Module |
| --- | --- |
cuda(device=None)
将模型的所有参数和缓冲区都转移到CUDA设备内存中。
因为cuda()函数同时会将处理模块中的所有参数并缓存这些参数的对象。所以如果想让模块在GPU上进行优化操作,一定要在构建优化器之前调用模块的cuda()函数。
| Parameters: | device (int, optional) – 如果设备编号被指定,所有的参数都会被拷贝到编号指定设备上 |
|---|---|
| Returns: | self |
| --- | --- |
| Return type: | Module |
| --- | --- |
double()
将所有的浮点数类型的参数(parameters)和缓冲区(buffers)转换为double数据类型。
| Returns: | self |
|---|---|
| Return type: | Module |
| --- | --- |
dump_patches = False
这个字段可以为load_state_dict()提供 BC 支持(BC support实在不懂是什么意思-.-)。 在 state_dict()函数返回的状态字典(state dict)中, 有一个名为_metadata的属性中存储了这个state_dict的版本号。_metadata是一个遵从了状态字典(state dict)的命名规范的关键字字典, 要想了解这个_metadata在加载状态(loading state dict)的时候是怎么用的,可以看一下 _load_from_state_dict部分的文档。
如果新的参数/缓冲区被添加于/移除自这个模块之中时,这个版本号数字会随之发生变化。同时模块的_load_from_state_dict方法会比较版本号的信息并依据此状态词典(state dict)的变化做出一些适当的调整。
eval()
将模块转换为测试模式。
这个函数只对特定的模块类型有效,如 Dropout和BatchNorm等等。如果想了解这些特定模块在训练/测试模式下各自的运作细节,可以看一下这些特殊模块的文档部分。
extra_repr()
为模块设置额外的展示信息(extra representation)。
如果想要打印展示(print)你的模块的一些定制的额外信息,那你应该在你的模块中复现这个函数。单行和多行的字符串都可以被接受。
float()
将所有浮点数类型的参数(parameters)和缓冲区(buffers)转换为float数据类型。
| Returns: | self |
|---|---|
| Return type: | Module |
| --- | --- |
forward(*input)
定义了每次模块被调用之后所进行的计算过程。
应该被Module类的所有子类重写。
Note
尽管模块的前向操作都被定义在这个函数里面,但是当你要进行模块的前向操作的时候,还是要直接调用模块Module 的实例函数,而不是直接调用这个forward()函数。这主要是因为前者会照顾到注册在此模块之上的钩子函数(the registered hooks)的运行,而后者则不会。
half()
将所有的浮点数类型的参数(parameters)和缓冲区(buffers)转换为half数据类型。
| Returns: | self |
|---|---|
| Return type: | Module |
| --- | --- |
load_state_dict(state_dict, strict=True)
将state_dict中的参数(parameters)和缓冲区(buffers)拷贝到模块和其子模块之中。如果strict被设置为True,那么state_dict中的键值(keys)必须与模型的[state_dict()]函数所返回的键值(keys)信息保持完全的一致。
load_state_dict()函数参数:
- state_dict (dict) – 一个包含了参数和持久缓冲区的字典。
- strict (bool, optional) – 是否严格要求
state_dict中的键值(keys)与模型state_dict()函数返回的键值(keys)信息保持完全一致。 默认:True
modules()
返回一个当前模块内所有模块(包括自身)的迭代器。
| Yields: | Module – a module in the network |
|---|
Note
注意重复的模块只会被返回一次。比在下面这个例子中,l就只会被返回一次。
例子:
>>> l = nn.Linear(2, 2)
>>> net = nn.Sequential(l, l)
>>> for idx, m in enumerate(net.modules()):
print(idx, '->', m)
0 -> Sequential (
(0): Linear (2 -> 2)
(1): Linear (2 -> 2)
)
1 -> Linear (2 -> 2)
named_buffers(prefix='', recurse=True)
返回一个模块缓冲区的迭代器,每次返回的元素是由缓冲区的名字和缓冲区自身组成的元组。
named_buffers()函数的参数:
- prefix (str) – 要添加在所有缓冲区名字之前的前缀。
- recurse (bool) – 如果设置为True,那样迭代器中不光会返回这个模块自身直连成员的缓冲区,同时也会递归返回其子模块的缓冲区。否则,只返回这个模块直连成员的缓冲区。
| Yields: | (string, torch.Tensor) – 包含了缓冲区的名字和缓冲区自身的元组 |
|---|
例子:
>>> for name, buf in self.named_buffers():
>>> if name in ['running_var']:
>>> print(buf.size())
named_children()
返回一个当前模型直连的子模块的迭代器,每次返回的元素是由子模块的名字和子模块自身组成的元组。
| Yields: | (string, Module) – 包含了子模块的名字和子模块自身的元组 |
|---|
例子:
>>> for name, module in model.named_children():
>>> if name in ['conv4', 'conv5']:
>>> print(module)
named_modules(memo=None, prefix='')
返回一个当前模块内所有模块(包括自身)的迭代器,每次返回的元素是由模块的名字和模块自身组成的元组。
| Yields: | (string, Module) – 模块名字和模块自身组成的元组 |
|---|
Note
重复的模块只会被返回一次。在下面的例子中,l只被返回了一次。
例子:
>>> l = nn.Linear(2, 2)
>>> net = nn.Sequential(l, l)
>>> for idx, m in enumerate(net.named_modules()):
print(idx, '->', m)
0 -> ('', Sequential (
(0): Linear (2 -> 2)
(1): Linear (2 -> 2)
))
1 -> ('0', Linear (2 -> 2))
named_parameters(prefix='', recurse=True)
返回一个当前模块内所有参数的迭代器,每次返回的元素是由参数的名字和参数自身组成的元组。
named_parameters()函数参数:
- prefix (str) – 要在所有参数名字前面添加的前缀。
- recurse (bool) – 如果设置为True,那样迭代器中不光会返回这个模块自身直连成员的参数,同时也会返回其子模块的参数。否则,只返回这个模块直连成员的参数。
| Yields: | (string, Parameter) – 参数名字和参数自身组成的元组 |
|---|
例子:
>>> for name, param in self.named_parameters():
>>> if name in ['bias']:
>>> print(param.size())
parameters(recurse=True)
返回一个遍历模块所有参数的迭代器。 parameters()函数一个经典的应用就是实践中经常将此函数的返回值传入优化器。
| Parameters: | recurse (bool) – 如果设置为True,那样迭代器中不光会返回这个模块自身直连成员的参数,同时也会递归返回其子模块的参数。否则,只返回这个模块直连成员的参数。 |
|---|---|
| Yields: | Parameter – 模块参数 |
| --- | --- |
例子:
>>> for param in model.parameters():
>>> print(type(param.data), param.size())
<class 'torch.FloatTensor'> (20L,)
<class 'torch.FloatTensor'> (20L, 1L, 5L, 5L)
register_backward_hook(hook)
在模块上注册一个挂载在反向操作之后的钩子函数。(挂载在backward之后这个点上的钩子函数)
对于每次输入,当模块关于此次输入的反向梯度的计算过程完成,该钩子函数都会被调用一次。此钩子函数需要遵从以下函数签名:
hook(module, grad_input, grad_output) -> Tensor or None
如果模块的输入或输出是多重的(multiple inputs or outputs),那 grad_input 和 grad_output 应当是元组数据。 钩子函数不能对输入的参数grad_input 和 grad_output进行任何更改,但是可以选择性地根据输入的参数返回一个新的梯度回去,而这个新的梯度在后续的计算中会替换掉grad_input。
| Returns: | 一个句柄(handle),这个handle的特点就是通过调用handle.remove()函数就可以将这个添加于模块之上的钩子移除掉。 |
|---|---|
| Return type: | torch.utils.hooks.RemovableHandle |
| --- | --- |
Warning
对于一些具有很多复杂操作的Module,当前的hook实现版本还不能达到完全理想的效果。举个例子,有些错误的情况下,函数的输入参数grad_input 和 grad_output中可能只是真正的输入和输出变量的一个子集。对于此类的Module,你应该使用[torch.Tensor.register_hook()]直接将钩子挂载到某个特定的输入输出的变量上,而不是当前的模块。
register_buffer(name, tensor)
往模块上添加一个持久缓冲区。
这个函数的经常会被用于向模块添加不会被认为是模块参数(model parameter)的缓冲区。举个栗子,BatchNorm的running_mean就不是一个参数,但却属于持久状态。
所添加的缓冲区可以通过给定的名字(name参数)以访问模块的属性的方式进行访问。
register_buffer()函数的参数:
- name (string) – 要添加的缓冲区的名字。所添加的缓冲区可以通过此名字以访问模块的属性的方式进行访问。
- tensor (Tensor) – 需要注册到模块上的缓冲区。
例子:
>>> self.register_buffer('running_mean', torch.zeros(num_features))
register_forward_hook(hook)
在模块上注册一个挂载在前向操作之后的钩子函数。(挂载在forward操作结束之后这个点)
此钩子函数在每次模块的 forward()函数运行结束产生output之后就会被触发。此钩子函数需要遵从以下函数签名:
hook(module, input, output) -> None
此钩子函数不能进行会修改 input 和 output 这两个参数的操作。
| Returns: | 一个句柄(handle),这个handle的特点就是通过调用handle.remove()函数就可以将这个添加于模块之上的钩子移除掉。 |
|---|---|
| Return type: | torch.utils.hooks.RemovableHandle |
| --- | --- |
register_forward_pre_hook(hook)
在模块上注册一个挂载在前向操作之前的钩子函数。(挂载在forward操作开始之前这个点)
此钩子函数在每次模块的 forward()函数运行开始之前会被触发。此钩子函数需要遵从以下函数签名: The hook will be called every time before forward() is invoked. It should have the following signature:
hook(module, input) -> None
此钩子函数不能进行会修改 input 这个参数的操作。
| Returns: | 一个句柄(handle),这个handle的特点就是通过调用handle.remove()函数就可以将这个添加于模块之上的钩子移除掉。 |
|---|---|
| Return type: | torch.utils.hooks.RemovableHandle |
| --- | --- |
register_parameter(name, param)
向模块添加一个参数(parameter)。
所添加的参数(parameter)可以通过给定的名字(name参数)以访问模块的属性的方式进行访问。
register_parameter()函数的参数:
- name (string) – 所添加的参数的名字. 所添加的参数(parameter)可以通过此名字以访问模块的属性的方式进行访问
- parameter (Parameter) – 要添加到模块之上的参数。
state_dict(destination=None, prefix='', keep_vars=False)
返回一个包含了模块当前所有状态(state)的字典(dictionary)。
所有的参数和持久缓冲区都被囊括在其中。字典的键值就是响应的参数和缓冲区的名字(name)。
| Returns: | 一个包含了模块当前所有状态的字典 |
|---|---|
| Return type: | dict |
| --- | --- |
例子:
>>> module.state_dict().keys()
['bias', 'weight']
to(*args, **kwargs)
移动 并且/或者(and/or)转换所有的参数和缓冲区。
这个函数可以这样调用:
to(device=None, dtype=None, non_blocking=False)
to(dtype, non_blocking=False)
to(tensor, non_blocking=False)
此函数的函数签名跟torch.Tensor.to()函数的函数签名很相似,只不过这个函数dtype参数只接受浮点数类型的dtype,如float, double, half( floating point desired dtype s)。同时,这个方法只会将浮点数类型的参数和缓冲区(the floating point parameters and buffers)转化为dtype(如果输入参数中给定的话)的数据类型。而对于整数类型的参数和缓冲区(the integral parameters and buffers),即便输入参数中给定了dtype,也不会进行转换操作,而如果给定了 device参数,移动操作则会正常进行。当non_blocking参数被设置为True之后,此函数会尽可能地相对于 host 进行异步的 转换/移动 操作,比如,将存储在固定内存(pinned memory)上的CPU Tensors移动到CUDA设备上这一过程既是如此。
例子在下面。
Note
这个方法对模块的修改都是in-place操作。
to()函数的参数:
- device (
torch.device) – 想要将这个模块中的参数和缓冲区转移到的设备。 - dtype (
torch.dtype) – 想要将这个模块中浮点数的参数和缓冲区转化为的浮点数数据类型。 - tensor (torch.Tensor) – 一个Tensor,如果被指定,其dtype和device信息,将分别起到上面两个参数的作用,也就是说,这个模块的浮点数的参数和缓冲区的数据类型将会被转化为这个Tensor的dtype类型,同时被转移到此Tensor所处的设备device上去。
| Returns: | self |
|---|---|
| Return type: | Module |
| --- | --- |
例子:
>>> linear = nn.Linear(2, 2)
>>> linear.weight
Parameter containing:
tensor([[ 0.1913, -0.3420],
[-0.5113, -0.2325]])
>>> linear.to(torch.double)
Linear(in_features=2, out_features=2, bias=True)
>>> linear.weight
Parameter containing:
tensor([[ 0.1913, -0.3420],
[-0.5113, -0.2325]], dtype=torch.float64)
>>> gpu1 = torch.device("cuda:1")
>>> linear.to(gpu1, dtype=torch.half, non_blocking=True)
Linear(in_features=2, out_features=2, bias=True)
>>> linear.weight
Parameter containing:
tensor([[ 0.1914, -0.3420],
[-0.5112, -0.2324]], dtype=torch.float16, device='cuda:1')
>>> cpu = torch.device("cpu")
>>> linear.to(cpu)
Linear(in_features=2, out_features=2, bias=True)
>>> linear.weight
Parameter containing:
tensor([[ 0.1914, -0.3420],
[-0.5112, -0.2324]], dtype=torch.float16)
train(mode=True)
将模块转换成训练模式。
这个函数只对特定的模块类型有效,如 Dropout和BatchNorm等等。如果想了解这些特定模块在训练/测试模式下各自的运作细节,可以看一下这些特殊模块的文档部分。
| Returns: | self |
|---|---|
| Return type: | Module |
| --- | --- |
type(dst_type)
将所有的参数和缓冲区转化为 dst_type的数据类型。
| Parameters: | dst_type (type or string) – 要转化的数据类型 |
|---|---|
| Returns: | self |
| --- | --- |
| Return type: | Module |
| --- | --- |
zero_grad()
讲模块所有参数的梯度设置为0。
Sequential
class torch.nn.Sequential(*args)
一种顺序容器。传入Sequential构造器中的模块会被按照他们传入的顺序依次添加到Sequential之上。相应的,一个由模块组成的顺序词典也可以被传入到Sequential的构造器中。
为了方便大家理解,举个简单的例子:
# 构建Sequential的例子
model = nn.Sequential(
nn.Conv2d(1,20,5),
nn.ReLU(),
nn.Conv2d(20,64,5),
nn.ReLU()
)
# 利用OrderedDict构建Sequential的例子
model = nn.Sequential(OrderedDict([
('conv1', nn.Conv2d(1,20,5)),
('relu1', nn.ReLU()),
('conv2', nn.Conv2d(20,64,5)),
('relu2', nn.ReLU())
]))
ModuleList (模块列表)
class torch.nn.ModuleList(modules=None)
ModuleList的作用是将一堆模块(module)存储在一个列表之中。
ModuleList 可以按一般的python列表的索引方式进行索引,但ModuleList中的模块都已被正确注册,并且对所有的Module method可见。
| Parameters: | modules (iterable_,_ optional) – 一个要添加到ModuleList中的由模块组成的可迭代结构(an iterable of modules) |
|---|
例子:
class MyModule(nn.Module):
def __init__(self):
super(MyModule, self).__init__()
self.linears = nn.ModuleList([nn.Linear(10, 10) for i in range(10)])
def forward(self, x):
# ModuleList可以被当作一个迭代器,同时也可以使用index索引
for i, l in enumerate(self.linears):
x = self.linears[i // 2](x) + l(x)
return x
append(module)
将一个模块添加到ModuleList的末尾,与python list的append()一致。
| Parameters: | module (nn.Module) – 要添加的模块 |
|---|
extend(modules)
将一个由模块组成的可迭代结构添加到ModuleList的末尾,与python list的extend()一致。
| Parameters: | modules (iterable) – 要添加到ModuleList末尾的由模块组成的可迭代结构 |
|---|
insert(index, module)
将给定的module插入到ModuleList的index位置。
insert()函数的参数:
- index (int) – 要插入的位置
- module (nn.Module) – 要插入的模块
ModuleDict (模块词典)
class torch.nn.ModuleDict(modules=None)
ModuleDict的作用是将一堆模块(module)存储在一个词典之中。
ModuleDict 可以按一般的python词典的索引方式进行索引,但ModuleDict中的模块都已被正确注册,并且对所有的Module method可见。
| Parameters: | modules (iterable_,_ optional) – 一个由(string: module)映射组成的映射集合(词典)或者 一个由(string, module)键/值对组成的可迭代结构 |
|---|
Example:
class MyModule(nn.Module):
def __init__(self):
super(MyModule, self).__init__()
self.choices = nn.ModuleDict({
'conv': nn.Conv2d(10, 10, 3),
'pool': nn.MaxPool2d(3)
})
self.activations = nn.ModuleDict([
['lrelu', nn.LeakyReLU()],
['prelu', nn.PReLU()]
])
def forward(self, x, choice, act):
x = self.choices[choice](x)
x = self.activations[act](x)
return x
clear()
移除ModuleDict中所有的元素。
items()
返回一个由ModuleDict中的键/值对组成的可迭代结构。
keys()
返回一个由ModuleDict中的键组成的可迭代结构。
pop(key)
将key这个键从ModuleDict中删除,并将其对应的模块返回。
| Parameters: | key (string) – 要从ModuleDict中弹出的键 |
|---|
update(modules)
通过传入的映射或者由键/值对组成的可迭代结构对当前的ModuleDict进行更新,如果传入对象与当前ModuleDict中存在键重复,当前ModuleDict中这些重复的键所对应的值将被覆盖。
| Parameters: | modules (iterable) – 一个由(string: Module)映射组成的映射集合(词典)或者 一个由(string: Module)键/值对组成的可迭代结构 |
|---|
values()
返回一个由ModuleDict中的值组成的可迭代结构。
ParameterList (参数列表)
class torch.nn.ParameterList(parameters=None)
ParameterList的作用是将一堆参数(parameter)存储到一个列表中。
ParameterList 可以按一般的python列表的索引方式进行索引,但ParameterList中的参数(parameter)都已被正确注册,并且对所有的Module method可见。
| Parameters: | parameters (iterable_,_ optional) – 要添加到ParameterList之上的由parameter组成的可迭代结构 |
|---|
例子:
class MyModule(nn.Module):
def __init__(self):
super(MyModule, self).__init__()
self.params = nn.ParameterList([nn.Parameter(torch.randn(10, 10)) for i in range(10)])
def forward(self, x):
# ParameterList可以被当作一个迭代器,同时也可以使用index索引
for i, p in enumerate(self.params):
x = self.params[i // 2].mm(x) + p.mm(x)
return x
append(parameter)
将一个parameter添加到ParameterList的末尾。
| Parameters: | parameter (nn.Parameter) – 要添加的参数 |
|---|
extend(parameters)
将一个由parameter组成的Python可迭代结构添加到ParameterList的末尾。
| Parameters: | parameters (iterable) – 要添加到ParameterList的末尾的由parameter组成的Python可迭代结构 |
|---|
ParameterDict (参数词典)
class torch.nn.ParameterDict(parameters=None)
ParameterDict的作用是将一堆参数(Parameter)存储在一个词典之中。
ParameterDict 可以按一般的python词典的索引方式进行索引,但ParameterDictt中的参数都已被正确注册,并且对所有的Module method可见。
| Parameters: | parameters (iterable_,_ optional) – 一个由(string:Parameter)映射组成的映射集合(词典)或者 一个由(string, Parameter)键/值对组成的可迭代结构 |
|---|
例子:
class MyModule(nn.Module):
def __init__(self):
super(MyModule, self).__init__()
self.params = nn.ParameterDict({
'left': nn.Parameter(torch.randn(5, 10)),
'right': nn.Parameter(torch.randn(5, 10))
})
def forward(self, x, choice):
x = self.params[choice].mm(x)
return x
clear()
移除ParameterDict中所有的元素。
items()
返回一个由ParameterDict中的键/值对组成的可迭代结构。
keys()
返回一个由 ParameterDict中的键组成的可迭代结构。
pop(key)
将key这个键从ParameterDict中删除,并将其对应的模块返回。
| Parameters: | key (string) – 要从ParameterDict中弹出的键 |
|---|
update(parameters)
通过传入的映射或者由键/值对组成的可迭代结构对当前的ParameterDict进行更新,如果传入对象与当前ParameterDict中存在键重复,当前ParameterDict中这些重复的键所对应的值将被覆盖。
| Parameters: | parameters (iterable) – modules (iterable) – 一个由(string: Parameter)映射组成的映射集合(词典)或者 一个由(string: Parameter)键/值对组成的可迭代结构 |
|---|
values()
返回一个由ParameterDict中的值组成的可迭代结构。
Convolution layers (卷积层)
Conv1d
class torch.nn.Conv1d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True)
利用指定大小的一维卷积核对输入的多通道一维输入信号进行一维卷积操作的卷积层。
在最简单的情况下,对于输入大小为 ,输出大小为
,输出大小为 的一维卷积层,其卷积计算过程可以如下表述:
的一维卷积层,其卷积计算过程可以如下表述:

这里的 符号实际上是一个互相关(cross-correlation) 操作符(大家可以自己查一下互相关和真卷积的区别,互相关因为实现起来很简单,所以一般的深度学习框架都是用互相关操作取代真卷积),
符号实际上是一个互相关(cross-correlation) 操作符(大家可以自己查一下互相关和真卷积的区别,互相关因为实现起来很简单,所以一般的深度学习框架都是用互相关操作取代真卷积),  is a batch size,
is a batch size,  代表通道的数量,
代表通道的数量,  代表信号序列的长度。
代表信号序列的长度。
stride参数控制了互相关操作(伪卷积)的步长,参数的数据类型一般是单个数字或者一个只有一个元素的元组。padding参数控制了要在一维卷积核的输入信号的各维度各边上要补齐0的层数。dilation参数控制了卷积核中各元素之间的距离;这也被称为多孔算法(à trous algorithm)。这个概念有点难解释,这个链接link用可视化的方法很好地解释了dilation的作用。groups控制了输入输出之间的连接(connections)的数量。in_channels和out_channels必须能被groups整除。举个栗子,> * 当 groups=1, 此Conv1d层会使用一个卷积层进行所有输入到输出的卷积操作。
> * 当 groups=2, 此时Conv1d层会产生两个并列的卷积层。同时,输入通道被分为两半,两个卷积层分别处理一半的输入通道,同时各自产生一半的输出通道。最后这两个卷积层的输出会被concatenated一起,作为此Conv1d层的输出。
> * 当 groups=
in_channels, 每个输入通道都会被单独的一组卷积层处理,这个组的大小是
Note
取决于你卷积核的大小,有些时候输入数据中某些列(最后几列)可能不会参与计算(比如列数整除卷积核大小有余数,而又没有padding,那最后的余数列一般不会参与卷积计算),这主要是因为pytorch中的互相关操作cross-correlation是保证计算正确的操作(valid operation), 而不是满操作(full operation)。所以实际操作中,还是要亲尽量选择好合适的padding参数哦。
Note
当groups == in_channels 并且 out_channels == K * in_channels(其中K是正整数)的时候,这个操作也被称为深度卷积。 举个创建深度卷积层的例子,对于一个大小为  的输入,要构建一个深度乘数为
的输入,要构建一个深度乘数为K的深度卷积层,可以通过以下参数来创建: 。
。
Note
当程序的运行环境是使用了CuDNN的CUDA环境的时候,一些非确定性的算法(nondeterministic algorithm)可能会被采用以提高整个计算的性能。如果不想使用这些非确定性的算法,你可以通过设置torch.backends.cudnn.deterministic = True来让整个计算过程保持确定性(可能会损失一定的计算性能)。对于后端(background),你可以看一下这一部分Reproducibility了解其相关信息。
Conv1d的参数:
- in_channels (int) – 输入通道个数
- out_channels (int) – 输出通道个数
- kernel_size (int or tuple) – 卷积核大小
- stride (int or tuple, optional) – 卷积操作的步长。 默认: 1
- padding (int or tuple, optional) – 输入数据各维度各边上要补齐0的层数。 默认: 0
- dilation (int or tuple, optional) – 卷积核各元素之间的距离。 默认: 1
- groups (int, optional) – 输入通道与输出通道之间相互隔离的连接的个数。 默认:1
- bias (bool, optional) – 如果被置为
True,向输出增加一个偏差量,此偏差是可学习参数。 默认:True
Shape:
输入:

输出:
 其中
其中
| 内部Variables: |
- weight (Tensor) – Conv1d模块中的一个大小为(out_channels, in_channels, kernel_size)的权重张量,这些权重可训练学习(learnable)。这些权重的初始值的采样空间是
 , 其中
, 其中 。
。 - bias (Tensor) – 模块的偏差项,大小为(out_channels),可训练学习。如果构造Conv1d时构造函数中的
bias被置为True,那么这些权重的初始值的采样空间是 , 其中
, 其中  。
。
例子:
>>> m = nn.Conv1d(16, 33, 3, stride=2)
>>> input = torch.randn(20, 16, 50)
>>> output = m(input)
Conv2d
class torch.nn.Conv2d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True)
利用指定大小的二维卷积核对输入的多通道二维输入信号进行二维卷积操作的卷积层。
在最简单的情况下,对于输入大小为 ,输出大小为
,输出大小为 的二维维卷积层,其卷积计算过程可以如下表述:
的二维维卷积层,其卷积计算过程可以如下表述:

这里的 符号实际上是一个二维互相关(cross-correlation) 操作符(大家可以自己查一下互相关和真卷积的区别,互相关因为实现起来很简单,所以一般的深度学习框架都是用互相关操作取代真卷积),
符号实际上是一个二维互相关(cross-correlation) 操作符(大家可以自己查一下互相关和真卷积的区别,互相关因为实现起来很简单,所以一般的深度学习框架都是用互相关操作取代真卷积),  is a batch size,
is a batch size,  代表通道的数量,
代表通道的数量,  是输入的二维数据的像素高度,
是输入的二维数据的像素高度, 是输入的二维数据的像素宽度。
是输入的二维数据的像素宽度。
stride参数控制了互相关操作(伪卷积)的步长,参数的数据类型一般是单个数字或者一个只有一个元素的元组。padding参数控制了要在二维卷积核的输入信号的各维度各边上要补齐0的层数。dilation参数控制了卷积核中各元素之间的距离;这也被称为多孔算法(à trous algorithm)。这个概念有点难解释,这个链接link用可视化的方法很好地解释了dilation的作用。groups控制了输入输出之间的连接(connections)的数量。in_channels和out_channels必须能被groups整除。举个栗子,> * 当 groups=1, 此Conv1d层会使用一个卷积层进行所有输入到输出的卷积操作。
> * 当 groups=2, 此时Conv1d层会产生两个并列的卷积层。同时,输入通道被分为两半,两个卷积层分别处理一半的输入通道,同时各自产生一半的输出通道。最后这两个卷积层的输出会被concatenated一起,作为此Conv1d层的输出。
> * 当 groups=
in_channels, 每个输入通道都会被单独的一组卷积层处理,这个组的大小是
kernel_size, stride, padding, dilation这几个参数均支持一下输入形式:
- 一个
int数字 – 二维数据的高和宽这两个维度都会采用这一个数字。- 一个由两个int数字组成的
tuple– 这种情况下,二维数据的高这一维度会采用元组中的第一个int数字,宽这一维度会采用第二个int数字。
Note
取决于你卷积核的大小,有些时候输入数据中某些列(最后几列)可能不会参与计算(比如列数整除卷积核大小有余数,而又没有padding,那最后的余数列一般不会参与卷积计算),这主要是因为pytorch中的互相关操作cross-correlation是保证计算正确的操作(valid operation), 而不是满操作(full operation)。所以实际操作中,还是要亲尽量选择好合适的padding参数哦。
Note 当groups == in_channels 并且 out_channels == K * in_channels(其中K是正整数)的时候,这个操作也被称为深度卷积。
换句话说,对于一个大小为 的输入,要构建一个深度乘数为
的输入,要构建一个深度乘数为K的深度卷积层,可以通过以下参数来创建: 。
。
Note
当程序的运行环境是使用了CuDNN的CUDA环境的时候,一些非确定性的算法(nondeterministic algorithm)可能会被采用以提高整个计算的性能。如果不想使用这些非确定性的算法,你可以通过设置torch.backends.cudnn.deterministic = True来让整个计算过程保持确定性(可能会损失一定的计算性能)。对于后端(background),你可以看一下这一部分Reproducibility了解其相关信息。
Conv2d的参数:
- in_channels (int) – 输入通道个数
- out_channels (int) – 输出通道个数
- kernel_size (int or tuple) – 卷积核大小
- stride (int or tuple, optional) –卷积操作的步长。 默认: 1
- padding (int or tuple, optional) – 输入数据各维度各边上要补齐0的层数。 默认: 0
- dilation (int or tuple, optional) –卷积核各元素之间的距离。 默认: 1
- groups (int, optional) – 输入通道与输出通道之间相互隔离的连接的个数。 默认:1
- bias (bool, optional) – 如果被置为
True,向输出增加一个偏差量,此偏差是可学习参数。 默认:True
Shape:
输入:

输出:
 其中
其中

| 内部Variables: |
- weight (Tensor) – Conv2d模块中的一个大小为 (out_channels, in_channels, kernel_size[0], kernel_size[1])的权重张量,这些权重可训练学习(learnable)。这些权重的初始值的采样空间是
 , 其中
, 其中 。
。 - bias (Tensor) – 块的偏差项,大小为(out_channels),可训练学习。如果构造Conv2d时构造函数中的
bias被置为True,那么这些权重的初始值的采样空间是 ,其中
,其中 。
。
例子:
>>> # With square kernels and equal stride
>>> m = nn.Conv2d(16, 33, 3, stride=2)
>>> # non-square kernels and unequal stride and with padding
>>> m = nn.Conv2d(16, 33, (3, 5), stride=(2, 1), padding=(4, 2))
>>> # non-square kernels and unequal stride and with padding and dilation
>>> m = nn.Conv2d(16, 33, (3, 5), stride=(2, 1), padding=(4, 2), dilation=(3, 1))
>>> input = torch.randn(20, 16, 50, 100)
>>> output = m(input)
Conv3d
class torch.nn.Conv3d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True)
利用指定大小的三维卷积核对输入的多通道三维输入信号进行三维卷积操作的卷积层。
最简单的情况下,对于输入大小为 ,输出大小为
,输出大小为 的三维卷积层,其卷积计算过程可以如下表述:
的三维卷积层,其卷积计算过程可以如下表述:

这里的  符号实际上是一个三维互相关 cross-correlation 操作符。
符号实际上是一个三维互相关 cross-correlation 操作符。
stride数控制了互相关操作(伪卷积)的步长。padding参数控制了要在三维卷积核的输入信号的各维度各边上要补齐0的层数。dilation参数控制了卷积核中各元素之间的距离;这也被称为多孔算法(à trous algorithm)。这个概念有点难解释,这个链接link用可视化的方法很好地解释了dilation的作用。groups控制了输入输出之间的连接(connections)的数量。in_channels和out_channels必须能被groups整除。举个栗子,
> * 当 groups=1, 此Conv3d层会使用一个卷积层进行对所有输入到输出的卷积操作。
> * 当 groups=2, 此时Conv3d层会产生两个并列的卷积层。同时,输入通道被分为两半,两个卷积层分别处理一半的输入通道,同时各自产生一半的输出通道。最后这两个卷积层的输出会被concatenated一起,作为此Conv3d层的输出。
> * 当 groups= in_channels, 每个输入通道都会被单独的一组卷积层处理,这个组的大小是  .
.
kernel_size, stride, padding, dilation这几个参数均支持一下输入形式:
- 一个
int数字 – 三维维数据的深度,高和宽这三个维度都会采用这一个数字。- 一个由三个int数字组成的
tuple– 这种情况下,三维数据的深度这一维度会采用元组中的第一个int数字,高这一维度会采用元组中的第二个int数字,宽这一维度会采用第三个int数字。
Note
取决于你卷积核的大小,有些时候输入数据中某些列(最后几列)可能不会参与计算(比如列数整除卷积核大小有余数,而又没有padding,那最后的余数列一般不会参与卷积计算),这主要是因为pytorch中的互相关操作cross-correlation是保证计算正确的操作(valid operation), 而不是满操作(full operation)。所以实际操作中,还是要亲尽量选择好合适的padding参数哦。
Note
当groups == in_channels 并且 out_channels == K * in_channels(其中K是正整数)的时候,这个操作也被称为深度卷积。
换句话说,对于一个大小为  的输入,要构建一个深度乘数为
的输入,要构建一个深度乘数为K的深度卷积层,可以通过以下参数来创建: 。
。
Note
当程序的运行环境是使用了CuDNN的CUDA环境的时候,一些非确定性的算法(nondeterministic algorithm)可能会被采用以提高整个计算的性能。如果不想使用这些非确定性的算法,你可以通过设置torch.backends.cudnn.deterministic = True来让整个计算过程保持确定性(可能会损失一定的计算性能)。对于后端(background),你可以看一下这一部分Reproducibility了解其相关信息。
Parameters:
- in_channels (int) – 输入通道的个数
- out_channels (int) – 卷积操作输出通道的个数
- kernel_size (int or tuple) – 卷积核大小
- stride (int or tuple, optional) – 卷积操作的步长。 默认: 1
- padding (int or tuple, optional) – 输入数据各维度各边上要补齐0的层数。 默认: 0
- dilation (int or tuple, optional) – 卷积核各元素之间的距离。 默认: 1
- groups (int, optional) – 输入通道与输出通道之间相互隔离的连接的个数。 默认:1
- bias (bool, optional) – 如果被置为
True,向输出增加一个偏差量,此偏差是可学习参数。 默认:True
Shape:
输入:

输出:
 where
where


| 内部Variables: |
- weight (Tensor) – Conv3d模块中的一个大小为 (out_channels, in_channels, kernel_size[0], kernel_size[1], kernel_size[2]) 的权重张量,这些权重可训练学习(learnable)。这些权重的初始值的采样空间是
 ,其中
,其中 。
。 - bias (Tensor) – 模块的偏差项,大小为(out_channels),可训练学习。如果构造Conv1d时构造函数中的
bias被置为True,那么这些权重的初始值的采样空间是 ,其中
,其中  。
。
例子:
>>> # With square kernels and equal stride
>>> m = nn.Conv3d(16, 33, 3, stride=2)
>>> # non-square kernels and unequal stride and with padding
>>> m = nn.Conv3d(16, 33, (3, 5, 2), stride=(2, 1, 1), padding=(4, 2, 0))
>>> input = torch.randn(20, 16, 10, 50, 100)
>>> output = m(input)
ConvTranspose1d
class torch.nn.ConvTranspose1d(in_channels, out_channels, kernel_size, stride=1, padding=0, output_padding=0, groups=1, bias=True, dilation=1)
利用指定大小的一维转置卷积核对输入的多通道一维输入信号进行转置卷积(当然此卷积也是互相关操作,cross-correlation)操作的模块。
该模块可以看作是Conv1d相对于其输入的梯度(the gradient of Conv1d with respect to its input, 直译), 转置卷积又被称为小数步长卷积或是反卷积(尽管这不是一个真正意义上的反卷积)。
stride控制了转置卷积操作的步长padding控制了要在输入的各维度的各边上补齐0的层数,与Conv1d不同的地方,此padding参数与实际补齐0的层数的关系为层数 = kernel_size - 1 - padding,详情请见下面的note。output_padding控制了转置卷积操作输出的各维度的长度增量,但注意这个参数不是说要往转置卷积的输出上pad 0,而是直接控制转置卷积的输出大小为根据此参数pad后的大小。更多的详情请见下面的note。dilation控制了卷积核中各点之间的空间距离;这也被称为多孔算法(à trous algorithm)。这个概念有点难解释,这个链接link用可视化的方法很好地解释了dilation的作用。groups控制了输入输出之间的连接(connections)的数量。in_channels和out_channels必须能被groups整除。举个栗子,> * 当 groups=1, 此Conv1d层会使用一个卷积层进行所有输入到输出的卷积操作。
> * 当 groups=2, 此时Conv1d层会产生两个并列的卷积层。同时,输入通道被分为两半,两个卷积层分别处理一半的输入通道,同时各自产生一半的输出通道。最后这两个卷积层的输出会被concatenated一起,作为此Conv1d层的输出。
> * 当 groups=
in_channels, 每个输入通道都会被单独的一组卷积层处理,这个组的大小是 。
。
Note
取决于你卷积核的大小,有些时候输入数据中某些列(最后几列)可能不会参与计算(比如列数整除卷积核大小有余数,而又没有padding,那最后的余数列一般不会参与卷积计算),这主要是因为pytorch中的互相关操作cross-correlation是保证计算正确的操作(valid operation), 而不是满操作(full operation)。所以实际操作中,还是要亲尽量选择好合适的padding参数哦。
Note
padding 参数控制了要在输入的各维度各边上补齐0的层数,与在Conv1d中不同的是,在转置卷积操作过程中,此padding参数与实际补齐0的层数的关系为层数 = kernel_size - 1 - padding, 这样设置的主要原因是当使用相同的参数构建Conv1d 和ConvTranspose1d模块的时候,这种设置能够实现两个模块有正好相反的输入输出的大小,即Conv1d的输出大小是其对应的ConvTranspose1d模块的输入大小,而ConvTranspose1d的输出大小又恰好是其对应的Conv1d模块的输入大小。然而,当stride > 1的时候,Conv1d 的一个输出大小可能会对应多个输入大小,上一个note中就详细的介绍了这种情况,这样的情况下要保持前面提到两种模块的输入输出保持反向一致,那就要用到 output_padding参数了,这个参数可以增加转置卷积输出的某一维度的大小,以此来达到前面提到的同参数构建的Conv1d 和ConvTranspose1d模块的输入输出方向一致。 但注意这个参数不是说要往转置卷积的输出上pad 0,而是直接控制转置卷积的输出各维度的大小为根据此参数pad后的大小。
Note
当程序的运行环境是使用了CuDNN的CUDA环境的时候,一些非确定性的算法(nondeterministic algorithm)可能会被采用以提高整个计算的性能。如果不想使用这些非确定性的算法,你可以通过设置torch.backends.cudnn.deterministic = True来让整个计算过程保持确定性(可能会损失一定的计算性能)。对于后端(background),你可以看一下这一部分Reproducibility了解其相关信息。
Parameters:
- in_channels (int) – 输入通道的个数
- out_channels (int) – 卷积操作输出通道的个数
- kernel_size (int or tuple) – 卷积核大小
- stride (int or tuple, optional) – 卷积操作的步长。 默认: 1
- padding (int or tuple, optional) –
kernel_size - 1 - padding层 0 会被补齐到输入数据的各边上。 默认: 0 - output_padding (int or tuple, optional) – 输出的各维度要增加的大小。默认:0
- groups (int, optional) – 输入通道与输出通道之间相互隔离的连接的个数。 默认:1
- bias (bool, optional) – 如果被置为
True,向输出增加一个偏差量,此偏差是可学习参数。 默认:True - dilation (int or tuple, optional) – 卷积核各元素之间的距离。 默认: 1
Shape:
输入:

输出:
 其中,
其中,
| Variables: |
- weight (Tensor) – 模块中的一个大小为 (in_channels, out_channels, kernel_size[0])的权重张量,这些权重可训练学习(learnable)。这些权重的初始值的采样空间是
 ,其中
,其中  。
。 - bias (Tensor) – 模块的偏差项,大小为 (out_channels), 如果构造函数中的
bias被置为True,那么这些权重的初始值的采样空间是 ,其中
,其中  。
。
ConvTranspose2d
class torch.nn.ConvTranspose2d(in_channels, out_channels, kernel_size, stride=1, padding=0, output_padding=0, groups=1, bias=True, dilation=1)
利用指定大小的二维转置卷积核对输入的多通道二维输入信号进行转置卷积(当然此卷积也是互相关操作,cross-correlation)操作的模块。
该模块可以看作是Conv2d相对于其输入的梯度(the gradient of Conv2d with respect to its input, 直译), 转置卷积又被称为小数步长卷积或是反卷积(尽管这不是一个真正意义上的反卷积)。
stride控制了转置卷积操作的步长padding控制了要在输入的各维度的各边上补齐0的层数,与Conv1d不同的地方,此padding参数与实际补齐0的层数的关系为层数 = kernel_size - 1 - padding,详情请见下面的note。output_padding控制了转置卷积操作输出的各维度的长度增量,但注意这个参数不是说要往转置卷积的输出上pad 0,而是直接控制转置卷积的输出大小为根据此参数pad后的大小。更多的详情请见下面的note。dilation控制了卷积核中各点之间的空间距离;这也被称为多孔算法(à trous algorithm)。这个概念有点难解释,这个链接link用可视化的方法很好地解释了dilation的作用。groups控制了输入输出之间的连接(connections)的数量。in_channels和out_channels必须能被groups整除。举个栗子,> * 当 groups=1, 此Conv1d层会使用一个卷积层进行所有输入到输出的卷积操作。
> * 当 groups=2, 此时Conv1d层会产生两个并列的卷积层。同时,输入通道被分为两半,两个卷积层分别处理一半的输入通道,同时各自产生一半的输出通道。最后这两个卷积层的输出会被concatenated一起,作为此Conv1d层的输出。
> * 当 groups=
in_channels, 每个输入通道都会被单独的一组卷积层处理,这个组的大小是 。
。
kernel_size, stride, padding, output_padding 这几个参数均支持一下输入形式:
- 一个
int数字 – 二维维数据的高和宽这两个维度都会采用这一个数字。- 一个由两个int数字组成的
tuple– 这种情况下,二维数据的高这一维度会采用元组中的第一个int数字,宽这一维度会采用第二个int数字。
Note
取决于你卷积核的大小,有些时候输入数据中某些列(最后几列)可能不会参与计算(比如列数整除卷积核大小有余数,而又没有padding,那最后的余数列一般不会参与卷积计算),这主要是因为pytorch中的互相关操作cross-correlation是保证计算正确的操作(valid operation), 而不是满操作(full operation)。所以实际操作中,还是要亲尽量选择好合适的padding参数哦。
Note
padding 参数控制了要在输入的各维度各边上补齐0的层数,与在Conv1d中不同的是,在转置卷积操作过程中,此padding参数与实际补齐0的层数的关系为层数 = kernel_size - 1 - padding, 这样设置的主要原因是当使用相同的参数构建Conv2d 和ConvTranspose2d模块的时候,这种设置能够实现两个模块有正好相反的输入输出的大小,即Conv2d的输出大小是其对应的ConvTranspose2d模块的输入大小,而ConvTranspose2d的输出大小又恰好是其对应的Conv2d模块的输入大小。然而,当stride > 1的时候,Conv2d 的一个输出大小可能会对应多个输入大小,上一个note中就详细的介绍了这种情况,这样的情况下要保持前面提到两种模块的输入输出保持反向一致,那就要用到 output_padding参数了,这个参数可以增加转置卷积输出的某一维度的大小,以此来达到前面提到的同参数构建的Conv2d 和ConvTranspose2d模块的输入输出方向一致。 但注意这个参数不是说要往转置卷积的输出上pad 0,而是直接控制转置卷积的输出各维度的大小为根据此参数pad后的大小。
Note
当程序的运行环境是使用了CuDNN的CUDA环境的时候,一些非确定性的算法(nondeterministic algorithm)可能会被采用以提高整个计算的性能。如果不想使用这些非确定性的算法,你可以通过设置torch.backends.cudnn.deterministic = True来让整个计算过程保持确定性(可能会损失一定的计算性能)。对于后端(background),你可以看一下这一部分Reproducibility了解其相关信息。
Parameters:
- in_channels (int) – 输入通道的个数
- out_channels (int) – 卷积操作输出通道的个数
- kernel_size (int or tuple) – 卷积核大小
- stride (int or tuple, optional) – 卷积操作的步长。 默认: 1
- padding (int or tuple, optional) –
kernel_size - 1 - padding层 0 会被补齐到输入数据的各边上。 默认: 0 - output_padding (int or tuple, optional) – 输出的各维度要增加的大小。默认:0
- groups (int, optional) – 输入通道与输出通道之间相互隔离的连接的个数。 默认:1
- bias (bool, optional) – 如果被置为
True,向输出增加一个偏差量,此偏差是可学习参数。 默认:True - dilation (int or tuple, optional) – 卷积核各元素之间的距离。 默认: 1
Shape:
- 输入:

- 输出:
 其中
其中


| Variables: |
- weight (Tensor) – 模块中的一个大小为 (in_channels, out_channels, kernel_size[0], kernel_size[1])的权重张量,这些权重可训练学习(learnable)。这些权重的初始值的采样空间是
 ,其中
,其中  。
。 - bias (Tensor) – 模块的偏差项,大小为 (out_channels), 如果构造函数中的
bias被置为True,那么这些权重的初始值的采样空间是 ,其中
,其中  。
。
例子:
>>> # With square kernels and equal stride
>>> m = nn.ConvTranspose2d(16, 33, 3, stride=2)
>>> # non-square kernels and unequal stride and with padding
>>> m = nn.ConvTranspose2d(16, 33, (3, 5), stride=(2, 1), padding=(4, 2))
>>> input = torch.randn(20, 16, 50, 100)
>>> output = m(input)
>>> # exact output size can be also specified as an argument
>>> input = torch.randn(1, 16, 12, 12)
>>> downsample = nn.Conv2d(16, 16, 3, stride=2, padding=1)
>>> upsample = nn.ConvTranspose2d(16, 16, 3, stride=2, padding=1)
>>> h = downsample(input)
>>> h.size()
torch.Size([1, 16, 6, 6])
>>> output = upsample(h, output_size=input.size())
>>> output.size()
torch.Size([1, 16, 12, 12])
ConvTranspose3d
class torch.nn.ConvTranspose3d(in_channels, out_channels, kernel_size, stride=1, padding=0, output_padding=0, groups=1, bias=True, dilation=1)
利用指定大小的三维转置卷积核对输入的多通道三维输入信号进行转置卷积(当然此卷积也是互相关操作,cross-correlation)操作的模块。转置卷积的操作本质是将各通道输入与卷积核做乘法,然后返回各通道与此卷积核乘积结果之和(卷积的定义)。
该模块可以看作是Conv3d相对于其输入的梯度(the gradient of Conv3d with respect to its input, 直译), 转置卷积又被称为小数步长卷积或是反卷积(尽管这不是一个真正意义上的反卷积)。
stride控制了转置卷积操作的步长padding控制了要在输入的各维度的各边上补齐0的层数,与Conv1d不同的地方,此padding参数与实际补齐0的层数的关系为层数 = kernel_size - 1 - padding,详情请见下面的note。output_padding控制了转置卷积操作输出的各维度的长度增量,但注意这个参数不是说要往转置卷积的输出上pad 0,而是直接控制转置卷积的输出大小为根据此参数pad后的大小。更多的详情请见下面的note。dilation控制了卷积核中各点之间的空间距离;这也被称为多孔算法(à trous algorithm)。这个概念有点难解释,这个链接link用可视化的方法很好地解释了dilation的作用。groups控制了输入输出之间的连接(connections)的数量。in_channels和out_channels必须能被groups整除。举个栗子,> * 当 groups=1, 此Conv1d层会使用一个卷积层进行所有输入到输出的卷积操作。
> * 当 groups=2, 此时Conv1d层会产生两个并列的卷积层。同时,输入通道被分为两半,两个卷积层分别处理一半的输入通道,同时各自产生一半的输出通道。最后这两个卷积层的输出会被concatenated一起,作为此Conv1d层的输出。
> * 当 groups=
in_channels, 每个输入通道都会被单独的一组卷积层处理,这个组的大小是 。
。
kernel_size, stride, padding, output_padding 这几个参数均支持一下输入形式:
- 一个
int数字 – 三维维数据的深度,高和宽这两个维度都会采用这一个数字。- 一个由三个int数字组成的
tuple– 这种情况下,三维数据的深度这一维度会采用元组中的第一个int数字,高这一维度会采用元组中的第二个int数字,宽这一维度会采用第三个int数字。
Note
取决于你卷积核的大小,有些时候输入数据中某些列(最后几列)可能不会参与计算(比如列数整除卷积核大小有余数,而又没有padding,那最后的余数列一般不会参与卷积计算),这主要是因为pytorch中的互相关操作cross-correlation是保证计算正确的操作(valid operation), 而不是满操作(full operation)。所以实际操作中,还是要亲尽量选择好合适的padding参数哦。
Note
padding 参数控制了要在输入的各维度各边上补齐0的层数,与在Conv3d中不同的是,在转置卷积操作过程中,此padding参数与实际补齐0的层数的关系为层数 = kernel_size - 1 - padding, 这样设置的主要原因是当使用相同的参数构建Conv3d 和ConvTranspose3d模块的时候,这种设置能够实现两个模块有正好相反的输入输出的大小,即Conv3d的输出大小是其对应的ConvTranspose3d模块的输入大小,而ConvTranspose3d的输出大小又恰好是其对应的Conv3d模块的输入大小。然而,当stride > 1的时候,Conv3d 的一个输出大小可能会对应多个输入大小,上一个note中就详细的介绍了这种情况,这样的情况下要保持前面提到两种模块的输入输出保持反向一致,那就要用到 output_padding参数了,这个参数可以增加转置卷积输出的某一维度的大小,以此来达到前面提到的同参数构建的Conv3d 和ConvTranspose3d模块的输入输出方向一致。 但注意这个参数不是说要往转置卷积的输出上pad 0,而是直接控制转置卷积的输出各维度的大小为根据此参数pad后的大小。
Note
当程序的运行环境是使用了CuDNN的CUDA环境的时候,一些非确定性的算法(nondeterministic algorithm)可能会被采用以提高整个计算的性能。如果不想使用这些非确定性的算法,你可以通过设置torch.backends.cudnn.deterministic = True来让整个计算过程保持确定性(可能会损失一定的计算性能)。对于后端(background),你可以看一下这一部分Reproducibility了解其相关信息。
Parameters:
- in_channels (int) – 输入通道的个数
- out_channels (int) – 卷积操作输出通道的个数
- kernel_size (int or tuple) – 卷积核大小
- stride (int or tuple, optional) – 卷积操作的步长。 默认: 1
- padding (int or tuple, optional) –
kernel_size - 1 - padding层 0 会被补齐到输入数据的各边上。 默认: 0 - output_padding (int or tuple, optional) – 输出的各维度要增加的大小。默认:0
- groups (int, optional) – 输入通道与输出通道之间相互隔离的连接的个数。 默认:1
- bias (bool, optional) – 如果被置为
True,向输出增加一个偏差量,此偏差是可学习参数。 默认:True - dilation (int or tuple, optional) – 卷积核各元素之间的距离。 默认: 1
Shape:
- 输入:

- 输出:
 其中
其中



| Variables: |
- weight (Tensor) – 模块中的一个大小为 (in_channels, out_channels, kernel_size[0], kernel_size[1], kernel_size[2])的权重张量,这些权重可训练学习(learnable)。这些权重的初始值的采样空间是
 ,其中
,其中  。
。 - bias (Tensor) – 模块的偏差项,大小为 (out_channels), 如果构造函数中的
bias被置为True,那么这些权重的初始值的采样空间是 ,其中
,其中  。
。
例子:
>>> # With square kernels and equal stride
>>> m = nn.ConvTranspose3d(16, 33, 3, stride=2)
>>> # non-square kernels and unequal stride and with padding
>>> m = nn.ConvTranspose3d(16, 33, (3, 5, 2), stride=(2, 1, 1), padding=(0, 4, 2))
>>> input = torch.randn(20, 16, 10, 50, 100)
>>> output = m(input)
Unfold
class torch.nn.Unfold(kernel_size, dilation=1, padding=0, stride=1)
将一个batch的输入张量展开成由多个滑动局部块组成的形式。(im2col的扩展模块,起到基本类似im2col的作用)
以一个大小为 的批次化(batched)输入张量为例,其中
的批次化(batched)输入张量为例,其中 是batch的大小,
是batch的大小, 是通道数量,
是通道数量, 代表了任意空间维度。那Unfold这个操作在此张量上的操作就是,将这个张量展开成由多个
代表了任意空间维度。那Unfold这个操作在此张量上的操作就是,将这个张量展开成由多个kernel_size大小的滑动块组成的大小为 的三维张量,其中
的三维张量,其中 是每个块中数的个数(每个块有
是每个块中数的个数(每个块有 个空间位置,每个空间位置存储一个通道大小为
个空间位置,每个空间位置存储一个通道大小为 的向量),
的向量), 是块的个数:
是块的个数:
 (这张图有问题啊,编辑整理的时候注意修正一下)
(这张图有问题啊,编辑整理的时候注意修正一下)
其中  是由上面例子中的
是由上面例子中的input各空间维度组成的, 遍历了各个空间维度。
遍历了各个空间维度。
因此,索引Fold操作的output的最后一个维度等价于索引某一个block,而索引操作的返回值是这个索引到的block中的所有值。
padding, stride 和 dilation 参数指明了滑动块的相关性质。
stride控制了滑动块的步长。padding控制了在变形之前要向input的各维度各边上补齐的0的层数。dilation控制了卷积核中各点之间的空间距离;这也被称为多孔算法(à trous algorithm)。这个概念有点难解释,这个链接link用可视化的方法很好地解释了dilation的作用。
Parameters:
kernel_size (int or tuple) – 滑动块的大小
stride (int or tuple, optional) – 滑动块在输入各维度上的步长。默认: 1
padding (int or tuple, optional) – 在输入各维度各边上补齐0的层数。
dilation (int or tuple, optional) – 控制了各元素之间的距离(没有指明元素具体指的是谁的元素,猜测是输出的)。默认:1
如果
kernel_size,dilation,padding或者stride的值是一个int,或是一个长度为1的int元组,在相关操作的时候各个空间维度上都会使用这同一个值。如果输出向量有两个空间维度,那么此Fold操作有时又被称为
im2col。
Note Fold在执行类col2im的操作的时候,主要是是通过集成此im(输出张量)分裂出所有对应位置的col(输入的滑动块)来复原原im。而Unfold则是通过从输入张量中不断拷贝数值到相应的block中来生成由滑动块组成的输出张量。所以,如果滑动块之间如果有数值重叠,那这些滑动块之间并不是互逆的。
Warning
目前,只有四维张量(比如批次化的图像张量)支持这个操作。
Shape:
- 输入:

- 输出:

Examples:
>>> unfold = nn.Unfold(kernel_size=(2, 3))
>>> input = torch.randn(2, 5, 3, 4)
>>> output = unfold(input)
>>> # each patch contains 30 VALUES (NULL, each of 5 channels)
>>> # 4 blocks (2x3 kernels) in total in the 3x4 input
>>> output.size()
torch.Size([2, 30, 4])
>>> # Convolution is equivalent with Unfold + Matrix Multiplication + Fold (or view to output shape)
>>> inp = torch.randn(1, 3, 10, 12)
>>> w = torch.randn(2, 3, 4, 5)
>>> inp_unf = torch.nn.functional.unfold(inp, (4, 5))
>>> out_unf = inp_unf.transpose(1, 2).matmul(w.view(w.size(0), -1).t()).transpose(1, 2)
>>> out = torch.nn.functional.fold(out_unf, (7, 8), (1, 1))
>>> # or equivalently (and avoiding a copy),
>>> # out = out_unf.view(1, 2, 7, 8)
>>> (torch.nn.functional.conv2d(inp, w) - out).abs().max()
tensor(1.9073e-06)
Fold
class torch.nn.Fold(output_size, kernel_size, dilation=1, padding=0, stride=1)
将由滑动局部块组成的数组集合为一个大张量。(类col2im)
考虑一个包含了很多个滑动局部块的输入张量,比如,一批图像分割块(patches of images)的集合,大小为 ,其中
,其中 是batch大小,
是batch大小,  是一个块中的数值个数(每个块有
是一个块中的数值个数(每个块有 个空间位置,每个空间位置存储一个通道大小为
个空间位置,每个空间位置存储一个通道大小为 的向量),
的向量), 是滑动块的个数。(这些大小参数严格遵循了
是滑动块的个数。(这些大小参数严格遵循了Unfold操作的输出向量的大小规定。)Fold操作通过求和重叠值的方式来将这些局部块集合为一个大小为 的
的output张量。与 Unfold类似,这些参数必须满足:

其中 遍历了各个空间维度。
遍历了各个空间维度。
output_size描述了要生成的output的各空间维度的大小。有时,同样数量的滑动块,可能会产生多种input的形状,比如,当stride > 0的时候,这时候,设置output_size参数就会显得极为重要。
padding, stride 和 dilation 参数指明了滑动块的相关性质。
stride控制了滑动块的步长。padding控制了在变形之前要向input的各维度各边上补齐的0的层数。dilation控制了卷积核中各点之间的空间距离;这也被称为多孔算法(à trous algorithm)。这个概念有点难解释,这个链接link用可视化的方法很好地解释了dilation的作用。
Parameters:
output_size (int or tuple) – 输出向量的各空间维度的大小 (i.e.,
input.sizes()[2:])kernel_size (int or tuple) – 滑动块的大小
stride (int or tuple, optional) – 滑动块在输入各维度上的步长。默认: 1
padding (int or tuple, optional) – 在输入各维度各边上补齐0的层数。
dilation (int or tuple, optional) – 控制了各元素之间的距离(没有指明元素具体指的是谁的元素,猜测是输出的)。默认:1
如果
output_size,kernel_size,dilation,padding或者stride是一个int或者长度为1的int元组,在相关操作的时候各个空间维度上都会使用这同一个值。如果此输出向量的空间维度数为2,那么此Fold操作有时又被称为
col2im。
Note Fold在执行类col2im的操作的时候,主要是是通过集成此im(输出张量)分裂出所有对应位置的col(输入的滑动块)来复原原im。而Unfold则是通过从输入张量中不断拷贝数值到相应的block中来生成由滑动块组成的输出张量。所以,如果滑动块之间如果有数值重叠,那这些滑动块之间并不是互逆的。
Warning
目前,只有四维张量(比如批次化的图像张量)支持这个操作。
Shape:
- 输入:

- 输出:

举例:
>>> fold = nn.Fold(output_size=(4, 5), kernel_size=(2, 2))
>>> input = torch.randn(1, 3 * 2 * 2, 1)
>>> output = fold(input)
>>> output.size()
卷积层部分Fold 与 Unfold 是1.0新增的内容,猜测其主要目的是开放col2im和im2col这两个通过矩阵乘法实现卷积操作的前序接口,要好好理解这部分可能要了解一下现在主流框架通过大矩阵乘法来实现卷积操作这一通用做法了,这一篇文章就介绍的很好[Implementing convolution as a matrix multiplication](https://buptldy.github.io/2016/10/01/2016-10-01-im2col/),这一段如果感觉我的直译晦涩难懂,那我深感抱歉并建议看一下英文原版,虽然我觉得英文原版介绍的也是晦涩难懂
池化层(Pooling layers)
MaxPool1d
class torch.nn.MaxPool1d(kernel_size, stride=None, padding=0, dilation=1, return_indices=False, ceil_mode=False)
对输入的多通道信号执行一维最大池化操作。
最简单的情况下,对于输入大小为  ,输出大小为
,输出大小为 的池化操作,此池化过程可表述如下:
的池化操作,此池化过程可表述如下:

padding 参数控制了要在输入信号的各维度各边上要补齐0的层数。 dilation 参数控制了池化核中各元素之间的距离;这也被称为多孔算法(à trous algorithm)。这个概念有点难解释,这个链接link用可视化的方法很好地解释了dilation的作用。
Parameters:
- kernel_size – 最大池化操作的滑动窗大小
- stride – 滑动窗的步长,默认值是
kernel_size - padding – 要在输入信号的各维度各边上要补齐0的层数
- dilation – 滑动窗中各元素之间的距离
- return_indices – 如果此参数被设置为
True, 那么此池化层在返回输出信号的同时还会返回一连串滑动窗最大值的索引位置,即每个滑动窗的最大值位置信息。这些信息可以在后面的上采样torch.nn.MaxUnpool1d中被用到。 - ceil_mode – 如果此参数被设置为True,计算输出信号大小的时候,会使用向上取整,代替默认的向下取整的操作
Shape:
输入:

输出:
 其中
其中
例子:
>>> # pool of size=3, stride=2
>>> m = nn.MaxPool1d(3, stride=2)
>>> input = torch.randn(20, 16, 50)
>>> output = m(input)
MaxPool2d
class torch.nn.MaxPool2d(kernel_size, stride=None, padding=0, dilation=1, return_indices=False, ceil_mode=False)
对输入的多通道信号执行二维最大池化操作。
最简单的情况下,对于输入大小为  ,输出大小为
,输出大小为 ,
,kernel_size为 的池化操作,此池化过程可表述如下:
的池化操作,此池化过程可表述如下:

padding 参数控制了要在输入信号的各维度各边上要补齐0的层数。 dilation 参数控制了池化核中各元素之间的距离;这也被称为多孔算法(à trous algorithm)。这个概念有点难解释,这个链接link用可视化的方法很好地解释了dilation的作用。
kernel_size, stride, padding, dilation 等参数均支持以下类型输入:
- 一个单独的
int– 此时这个int会同时控制池化滑动窗的宽和高这两个维度的大小- 一个由两个
int组成的tuple– 这种情况下,高这一维度会采用元组中的第一个int数字,宽这一维度会采用第二个int数字。
Parameters:
- kernel_size – 最大池化操作的滑动窗大小
- stride – 滑动窗的步长,默认值是
kernel_size - padding – 要在输入信号的各维度各边上要补齐0的层数
- dilation – 滑动窗中各元素之间的距离
- return_indices – 如果此参数被设置为
True, 那么此池化层在返回输出信号的同时还会返回一连串滑动窗最大值的索引位置,即每个滑动窗的最大值位置信息。这些信息可以在后面的上采样torch.nn.MaxUnpool2d中被用到。 - ceil_mode – 如果此参数被设置为True,计算输出信号大小的时候,会使用向上取整,代替默认的向下取整的操作
Shape:
输入:

输出:
 , 其中
, 其中

例子:
>>> # pool of square window of size=3, stride=2
>>> m = nn.MaxPool2d(3, stride=2)
>>> # pool of non-square window
>>> m = nn.MaxPool2d((3, 2), stride=(2, 1))
>>> input = torch.randn(20, 16, 50, 32)
>>> output = m(input)
MaxPool3d
class torch.nn.MaxPool3d(kernel_size, stride=None, padding=0, dilation=1, return_indices=False, ceil_mode=False)
对输入的多通道信号执行三维最大池化操作。
最简单的情况下,对于输入大小为  ,输出大小为
,输出大小为 ,
,kernel_size为  的池化操作,此池化过程可表述如下:
的池化操作,此池化过程可表述如下:

padding 参数控制了要在输入信号的各维度各边上要补齐0的层数。 dilation 参数控制了池化核中各元素之间的距离;这也被称为多孔算法(à trous algorithm)。这个概念有点难解释,这个链接link用可视化的方法很好地解释了dilation的作用。
kernel_size, stride, padding, dilation 等参数均支持以下类型输入:
- 一个单独的
int– 此时这个int会同时控制池化滑动窗的深度,宽和高这三个维度的大小- 一个由三个
int组成的tuple– 这种情况下,深度这一维度会采用元组中的第一个int数字,高这一维度会采用元组中的第二个int数字,宽这一维度会采用第三个int数字。
Parameters:
- kernel_size – 最大池化操作的滑动窗大小
- stride – 滑动窗的步长,默认值是
kernel_size - padding – 要在输入信号的各维度各边上要补齐0的层数
- dilation – 滑动窗中各元素之间的距离
- return_indices – 如果此参数被设置为
True, 那么此池化层在返回输出信号的同时还会返回一连串滑动窗最大值的索引位置,即每个滑动窗的最大值位置信息。这些信息可以在后面的上采样torch.nn.MaxUnpool3d中被用到。 - ceil_mode – 如果此参数被设置为True,计算输出信号大小的时候,会使用向上取整,代替默认的向下取整的操作
Shape:
输入:

输出:
 , 其中
, 其中


例子:
>>> # pool of square window of size=3, stride=2
>>> m = nn.MaxPool3d(3, stride=2)
>>> # pool of non-square window
>>> m = nn.MaxPool3d((3, 2, 2), stride=(2, 1, 2))
>>> input = torch.randn(20, 16, 50,44, 31)
>>> output = m(input)
MaxUnpool1d
class torch.nn.MaxUnpool1d(kernel_size, stride=None, padding=0)
MaxPool1d的逆过程,不过并不是完全的逆过程,因为在MaxPool1d的过程中,池化窗区域内的非最大值都已经丢失。 MaxUnpool1d的输入是MaxPool1d的输出,其中也包括包括滑动窗最大值的索引(即return_indices所控制的输出),逆池化操作的过程就是将MaxPool1d过程中产生的最大值插回到原来的位置,并将非最大值区域置为0。
Note
MaxPool1d操作可以将多个大小不同的输入映射到相同的输出大小。因此,池化操作的反过程,MaxUnpool1d的上采样过程的输出大小就不唯一了。为了适应这一点,可以在设置控制上采样输出大小的(output_size)参数。 具体用法,请参阅下面的输入和示例
Parameters:
- kernel_size (int or tuple) – 最大池化窗的大小
- stride (int or tuple) – 最大池化窗的步长。默认
kernel_size - padding (int or tuple) – 输入信号的各维度各边要补齐0的层数
Inputs:
input: 要执行上采样操作的张量indices:MaxPool1d池化过程中输出的池化窗最大值的位置索引output_size(选填): 指定的输出大小
Shape:
输入:

输出:
 , 其中
, 其中
也可以使用
output_size指定输出的大小
例子:
>>> pool = nn.MaxPool1d(2, stride=2, return_indices=True)
>>> unpool = nn.MaxUnpool1d(2, stride=2)
>>> input = torch.tensor([[[1., 2, 3, 4, 5, 6, 7, 8]]])
>>> output, indices = pool(input)
>>> unpool(output, indices)
tensor([[[ 0., 2., 0., 4., 0., 6., 0., 8.]]])
>>> # Example showcasing the use of output_size
>>> input = torch.tensor([[[1., 2, 3, 4, 5, 6, 7, 8, 9]]])
>>> output, indices = pool(input)
>>> unpool(output, indices, output_size=input.size())
tensor([[[ 0., 2., 0., 4., 0., 6., 0., 8., 0.]]])
>>> unpool(output, indices)
tensor([[[ 0., 2., 0., 4., 0., 6., 0., 8.]]])
MaxUnpool2d
class torch.nn.MaxUnpool2d(kernel_size, stride=None, padding=0)
MaxPool2d的逆过程,不过并不是完全的逆过程,因为在MaxPool2d的过程中,池化窗区域内的非最大值都已经丢失。 MaxUnpool2d的输入是MaxPool2d的输出,其中也包括包括滑动窗最大值的索引(即return_indices所控制的输出),逆池化操作的过程就是将MaxPool2d过程中产生的最大值插回到原来的位置,并将非最大值区域置为0。
Note
MaxPool2d操作可以将多个大小不同的输入映射到相同的输出大小。因此,池化操作的反过程,MaxUnpool2d的上采样过程的输出大小就不唯一了。为了适应这一点,可以在设置控制上采样输出大小的(output_size)参数。 具体用法,请参阅下面的输入和示例
Parameters:
- kernel_size (int or tuple) – 最大池化窗的大小
- stride (int or tuple) – 最大池化窗的步长。默认
kernel_size - padding (int or tuple) – 输入信号的各维度各边要补齐0的层数
Inputs:
input: 要执行上采样操作的张量indices:MaxPool2d池化过程中输出的池化窗最大值的位置索引output_size(选填): 指定的输出大小
Shape:
输入:

输出:
 , 其中
, 其中

也可以使用
output_size指定输出的大小
例子:
>>> pool = nn.MaxPool2d(2, stride=2, return_indices=True)
>>> unpool = nn.MaxUnpool2d(2, stride=2)
>>> input = torch.tensor([[[[ 1., 2, 3, 4],
[ 5, 6, 7, 8],
[ 9, 10, 11, 12],
[13, 14, 15, 16]]]])
>>> output, indices = pool(input)
>>> unpool(output, indices)
tensor([[[[ 0., 0., 0., 0.],
[ 0., 6., 0., 8.],
[ 0., 0., 0., 0.],
[ 0., 14., 0., 16.]]]])
>>> # specify a different output size than input size
>>> unpool(output, indices, output_size=torch.Size([1, 1, 5, 5]))
tensor([[[[ 0., 0., 0., 0., 0.],
[ 6., 0., 8., 0., 0.],
[ 0., 0., 0., 14., 0.],
[ 16., 0., 0., 0., 0.],
[ 0., 0., 0., 0., 0.]]]])
MaxUnpool3d
class torch.nn.MaxUnpool3d(kernel_size, stride=None, padding=0)
MaxPool3d的逆过程,不过并不是完全的逆过程,因为在MaxPool3d的过程中,池化窗区域内的非最大值都已经丢失。 MaxUnpool3d的输入是MaxPool3d的输出,其中也包括包括滑动窗最大值的索引(即return_indices所控制的输出),逆池化操作的过程就是将MaxPool3d过程中产生的最大值插回到原来的位置,并将非最大值区域置为0。
Note
MaxPool3d操作可以将多个大小不同的输入映射到相同的输出大小。因此,池化操作的反过程,MaxUnpool3d的上采样过程的输出大小就不唯一了。为了适应这一点,可以在设置控制上采样输出大小的(output_size)参数。 具体用法,请参阅下面的输入和示例
Parameters:
- kernel_size (int or tuple) – 最大池化窗的大小
- stride (int or tuple) – 最大池化窗的步长。默认
kernel_size - padding (int or tuple) – 输入信号的各维度各边要补齐0的层数
Inputs:
input: 要执行上采样操作的张量indices:MaxPool3d池化过程中输出的池化窗最大值的位置索引output_size(选填): 指定的输出大小
Shape:
输入:

输出:
 , 其中
, 其中


也可以使用
output_size指定输出的大小
例子:
>>> # pool of square window of size=3, stride=2
>>> pool = nn.MaxPool3d(3, stride=2, return_indices=True)
>>> unpool = nn.MaxUnpool3d(3, stride=2)
>>> output, indices = pool(torch.randn(20, 16, 51, 33, 15))
>>> unpooled_output = unpool(output, indices)
>>> unpooled_output.size()
torch.Size([20, 16, 51, 33, 15])
AvgPool1d
class torch.nn.AvgPool1d(kernel_size, stride=None, padding=0, ceil_mode=False, count_include_pad=True)
对输入的多通道信号执行一维平均池化操作。
最简单的情况下,对于输入大小为  ,输出大小为
,输出大小为 ,
,kernel_size为 的池化操作,此池化过程可表述如下:
的池化操作,此池化过程可表述如下:

padding 参数控制了要在输入信号的各维度各边上要补齐0的层数。
kernel_size, stride, padding, dilation 等参数均支持输入一个int或者由一个int组成的tuple。
Parameters:
- kernel_size – 平均池化操作的滑动窗大小
- stride – 滑动窗的步长,默认值是
kernel_size - padding – 要在输入信号的各维度各边上要补齐0的层数
- ceil_mode – 如果此参数被设置为True,计算输出信号大小的时候,会使用向上取整,代替默认的向下取整的操作
- count_include_pad – 如果被设置为True, 那么在进行平均运算的时候也会将用于补齐的0加入运算。
Shape:
输入:

输出:
 , 其中
, 其中
例子:
>>> # pool with window of size=3, stride=2
>>> m = nn.AvgPool1d(3, stride=2)
>>> m(torch.tensor([[[1.,2,3,4,5,6,7]]]))
tensor([[[ 2., 4., 6.]]])
AvgPool2d
class torch.nn.AvgPool2d(kernel_size, stride=None, padding=0, ceil_mode=False, count_include_pad=True)
对输入的多通道信号执行二维平均池化操作。 最简单的情况下,对于输入大小为  ,输出大小为
,输出大小为 ,
,kernel_size为 的池化操作,此池化过程可表述如下:
的池化操作,此池化过程可表述如下:

padding 参数控制了要在输入信号的各维度各边上要补齐0的层数。
kernel_size, stride, padding等参数均支持以下类型输入:
- 一个单独的
int– 此时这个int会同时控制池化滑动窗的宽和高这两个维度的大小- 一个由两个
int组成的tuple– 这种情况下,高这一维度会采用元组中的第一个int数字,宽这一维度会采用第二个int数字。
Parameters:
- kernel_size – 平均池化操作的滑动窗大小
- stride – 滑动窗的步长,默认值是
kernel_size - padding – 要在输入信号的各维度各边上要补齐0的层数
- ceil_mode – 如果此参数被设置为True,计算输出信号大小的时候,会使用向上取整,代替默认的向下取整的操作
- count_include_pad – 如果被设置为True, 那么在进行平均运算的时候也会将用于补齐的0加入运算。
Shape:
输入:

输出:
 , 其中
, 其中

例子:
>>> # pool of square window of size=3, stride=2
>>> m = nn.AvgPool2d(3, stride=2)
>>> # pool of non-square window
>>> m = nn.AvgPool2d((3, 2), stride=(2, 1))
>>> input = torch.randn(20, 16, 50, 32)
>>> output = m(input)
AvgPool3d
class torch.nn.AvgPool3d(kernel_size, stride=None, padding=0, ceil_mode=False, count_include_pad=True)
对输入的多通道信号执行三维平均池化操作。 最简单的情况下,对于输入大小为 ,输出大小为
,输出大小为 ,
,kernel_size为 的池化操作,此池化过程可表述如下:
的池化操作,此池化过程可表述如下:

padding 参数控制了要在输入信号的各维度各边上要补齐0的层数。
kernel_size, stride, padding等参数均支持以下类型输入:
- 一个单独的
int– 此时这个int会同时控制池化滑动窗的深度,宽和高这两个维度的大小- 一个由三个
int组成的tuple– 这种情况下,深度这一维度会采用元组中的第一个int数字,高这一维度会采用元组中的第二个int数字,宽这一维度会采用第三个int数字。
Parameters:
- kernel_size – 平均池化操作的滑动窗大小
- stride – 滑动窗的步长,默认值是
kernel_size - padding – 要在输入信号的各维度各边上要补齐0的层数
- ceil_mode – 如果此参数被设置为True,计算输出信号大小的时候,会使用向上取整,代替默认的向下取整的操作
- count_include_pad – 如果被设置为True, 那么在进行平均运算的时候也会将用于补齐的0加入运算。
Shape:
输入:

输出:
 , 其中
, 其中


例子:
>>> # pool of square window of size=3, stride=2
>>> m = nn.AvgPool3d(3, stride=2)
>>> # pool of non-square window
>>> m = nn.AvgPool3d((3, 2, 2), stride=(2, 1, 2))
>>> input = torch.randn(20, 16, 50,44, 31)
>>> output = m(input)
FractionalMaxPool2d
class torch.nn.FractionalMaxPool2d(kernel_size, output_size=None, output_ratio=None, return_indices=False, _random_samples=None)
对输入的多通道信号执行小数级二维最大池化操作。小数级指的是此操作的输出大小与输入大小成指定的小数倍数关系。
Ben Graham的这篇文章Fractional MaxPooling中详细地介绍了小数级二维最大池化的基本思想和技术细节。
小数级二维最大池化的基本思想就是将最大池化操作应用于 个由随机步长大小采集的区域中,这些步长大小是由输出目标的大小决定的。小数级二维最大池化的输出特征的数量等于输入通道的数量。
个由随机步长大小采集的区域中,这些步长大小是由输出目标的大小决定的。小数级二维最大池化的输出特征的数量等于输入通道的数量。
Parameters:
- kernel_size – 执行最大操作的窗口大小。支持的数据类型包括一个单独的数字k(生成一个大小为k x k的正方形kernal),或者一个元组
(kh x kw) - output_size – 池化输出目标大小,具体形式是
oH x oW。支持的数据类型包括一个单独的数字oH,或者一个元组(oH, oW),注意此处oH x oW与kernal_size中的kh x ow相呼应,两者成一定的小数级倍数关系 - output_ratio – 如果想让输出目标的大小是输入目标大小的ratio倍,可以通过设置此参数来实现。此参数可以是一个小数数字或者小数元组,数字范围是(0, 1)
- return_indices – 如果此参数设置为
True, 那么在池化操作结束后,返回池化输出结果的同时也会返回每个池化区域中,最大值的位置信息。这些信息在nn.MaxUnpool2d()可以被用到。此参数默认为False
例子
>>> # pool of square window of size=3, and target output size 13x12
>>> m = nn.FractionalMaxPool2d(3, output_size=(13, 12))
>>> # pool of square window and target output size being half of input image size
>>> m = nn.FractionalMaxPool2d(3, output_ratio=(0.5, 0.5))
>>> input = torch.randn(20, 16, 50, 32)
>>> output = m(input)
LPPool1d
class torch.nn.LPPool1d(norm_type, kernel_size, stride=None, ceil_mode=False)
对输入的多通道信号执行一维幂平均池化操作。
对于每个池化窗口,此池化操作的计算方式如下:

- 当p为无穷大的时候时,等价于最大池化操作
- 当
p=1时,等价于求和池化操作(一定程度上等价于平均池化)
Note
如果某个特殊的输入导致这个输入关于幂指数p的求和是0,那上述池化函数在这一点是没有意义的。在实际实现过程中,此点的梯度被设置为0。
Parameters:
- kernel_size: 池化窗口的大小
- stride:池化窗口移动的步长。默认值是
kernel_size - ceil_mode: 当此参数被设置为
True时,在计算输出大小的时候将使用向下取整代替向上取整
Shape:
输入:

输出:
 ,其中
,其中
例子:
>>> # power-2 pool of window of length 3, with stride 2.
>>> m = nn.LPPool1d(2, 3, stride=2)
>>> input = torch.randn(20, 16, 50)
>>> output = m(input)
LPPool2d
class torch.nn.LPPool2d(norm_type, kernel_size, stride=None, ceil_mode=False)
对输入的多通道信号执行二维幂平均池化操作。
对于每个池化窗口,此池化操作的计算方式如下:
- 当p等于
 时候时,等价于最大池化操作
时候时,等价于最大池化操作 - 当
p=1时,等价于求和池化操作(一定程度上等价于平均池化)
参数kernel_size, stride支持的数据类型:
int,池化窗口的宽和高相等tuple数组(两个数字的),第一个元素是池化窗口的高,第二个是宽
Note
如果某个特殊的输入导致这个输入关于幂指数p的求和是0,那上述池化函数在这一点是没有意义的。在实际实现过程中,此点的梯度被设置为0。
Parameters:
- kernel_size: 池化窗口的大小
- stride:池化窗口移动的步长。默认值是
kernel_size - ceil_mode: 当此参数被设置为
True时,在计算输出大小的时候将使用向下取整代替向上取整
Shape:
输入:

输出:
 , 其中
, 其中

例子:
>>> # power-2 pool of square window of size=3, stride=2
>>> m = nn.LPPool2d(2, 3, stride=2)
>>> # pool of non-square window of power 1.2
>>> m = nn.LPPool2d(1.2, (3, 2), stride=(2, 1))
>>> input = torch.randn(20, 16, 50, 32)
>>> output = m(input)
AdaptiveMaxPool1d
class torch.nn.AdaptiveMaxPool1d(output_size, return_indices=False)
对输入的多通道信号进行1维的自适应最大池化操作。
此池化层可以通过指定输出大小H,将任意输入大小的输入强行的池化到指定的输出大小。不过输入和输出特征的通道数不会变化。
Parameters:
- output_size – 指定的输出大小H
- return_indices – 如果此参数设置为
True, 那么在池化操作结束后,返回池化输出结果的同时也会返回每个池化区域中,最大值的位置信息。这些信息在nn.MaxUnpool1d()可以被用到。此参数默认为False
例子
>>> # target output size of 5
>>> m = nn.AdaptiveMaxPool1d(5)
>>> input = torch.randn(1, 64, 8)
>>> output = m(input)
AdaptiveMaxPool2d
class torch.nn.AdaptiveMaxPool2d(output_size, return_indices=False)
对输入的多通道信号进行2维的自适应最大池化操作。
此池化层可以通过指定输出大小H x W,将任意输入大小的输入强行的池化到指定的输出大小。不过输入和输出特征的通道数不会变化。
Parameters:
- output_size – 指定的输出大小H x W。此参数支持的数据类型可以是一个元组(H, W),又或者是一个单独的
intH(等价于H x H)。H 和 W这两个参数支持输入一个int又或者是None,None表示此输出维度的大小等价于输入数据此维度的大小 - return_indices – 如果此参数设置为
True, 那么在池化操作结束后,返回池化输出结果的同时也会返回每个池化区域中,最大值的位置信息。这些信息在nn.MaxUnpool2d()可以被用到。此参数默认为False
例子
>>> # target output size of 5x7
>>> m = nn.AdaptiveMaxPool2d((5,7))
>>> input = torch.randn(1, 64, 8, 9)
>>> output = m(input)
>>> # target output size of 7x7 (square)
>>> m = nn.AdaptiveMaxPool2d(7)
>>> input = torch.randn(1, 64, 10, 9)
>>> output = m(input)
>>> # target output size of 10x7
>>> m = nn.AdaptiveMaxPool2d((None, 7))
>>> input = torch.randn(1, 64, 10, 9)
>>> output = m(input)
AdaptiveMaxPool3d
class torch.nn.AdaptiveMaxPool3d(output_size, return_indices=False)
对输入的多通道信号进行3维的自适应最大池化操作。
此池化层可以通过指定输出大小D x H x W,将任意输入大小的输入强行的池化到指定的输出大小。不过输入和输出特征的通道数不会变化。
Parameters:
- output_size – 指定的输出大小D x H x W。此参数支持的数据类型可以是一个元组(D, H, W),又或者是一个单独的
intD(等价于D x D x D)。D, H 和 W这三个参数支持输入一个int又或者是None,None表示此输出维度的大小等价于输入数据此维度的大小 - return_indices – 如果此参数设置为
True, 那么在池化操作结束后,返回池化输出结果的同时也会返回每个池化区域中,最大值的位置信息。这些信息在nn.MaxUnpool3d()可以被用到。此参数默认为False
例子
>>> # target output size of 5x7x9
>>> m = nn.AdaptiveMaxPool3d((5,7,9))
>>> input = torch.randn(1, 64, 8, 9, 10)
>>> output = m(input)
>>> # target output size of 7x7x7 (cube)
>>> m = nn.AdaptiveMaxPool3d(7)
>>> input = torch.randn(1, 64, 10, 9, 8)
>>> output = m(input)
>>> # target output size of 7x9x8
>>> m = nn.AdaptiveMaxPool3d((7, None, None))
>>> input = torch.randn(1, 64, 10, 9, 8)
>>> output = m(input)
AdaptiveAvgPool1d
class torch.nn.AdaptiveAvgPool1d(output_size)
对输入的多通道信号进行1维的自适应平均池化操作。
此池化层可以通过指定输出大小H,将任意输入大小的输入强行的池化到指定的输出大小。不过输入和输出特征的通道数不会变化。
Parameters:
- output_size – 指定的输出大小H
例子
>>> # target output size of 5
>>> m = nn.AdaptiveAvgPool1d(5)
>>> input = torch.randn(1, 64, 8)
>>> output = m(input)
AdaptiveAvgPool2d
class torch.nn.AdaptiveAvgPool2d(output_size)
对输入的多通道信号进行2维的自适应平均池化操作。
此池化层可以通过指定输出大小H x W,将任意输入大小的输入强行的池化到指定的输出大小。不过输入和输出特征的通道数不会变化。
Parameters:
- output_size – 指定的输出大小H x W。此参数支持的数据类型可以是一个元组(H, W),又或者是一个单独的
intH(等价于H x H)。H 和 W这两个参数支持输入一个int又或者是None,None表示此输出维度的大小等价于输入数据此维度的大小
例子
>>> # target output size of 5x7
>>> m = nn.AdaptiveAvgPool2d((5,7))
>>> input = torch.randn(1, 64, 8, 9)
>>> output = m(input)
>>> # target output size of 7x7 (square)
>>> m = nn.AdaptiveAvgPool2d(7)
>>> input = torch.randn(1, 64, 10, 9)
>>> output = m(input)
>>> # target output size of 10x7
>>> m = nn.AdaptiveMaxPool2d((None, 7))
>>> input = torch.randn(1, 64, 10, 9)
>>> output = m(input)
AdaptiveAvgPool3d
class torch.nn.AdaptiveAvgPool3d(output_size)
对输入的多通道信号进行3维的自适应平均池化操作。
此池化层可以通过指定输出大小D x H x W,将任意输入大小的输入强行的池化到指定的输出大小。不过输入和输出特征的通道数不会变化。
Parameters:
- output_size – 指定的输出大小D x H x W。此参数支持的数据类型可以是一个元组(D, H, W),又或者是一个单独的
intD(等价于D x D x D)。D, H 和 W这三个参数支持输入一个int又或者是None,None表示此输出维度的大小等价于输入数据此维度的大小
例子
>>> # target output size of 5x7x9
>>> m = nn.AdaptiveAvgPool3d((5,7,9))
>>> input = torch.randn(1, 64, 8, 9, 10)
>>> output = m(input)
>>> # target output size of 7x7x7 (cube)
>>> m = nn.AdaptiveAvgPool3d(7)
>>> input = torch.randn(1, 64, 10, 9, 8)
>>> output = m(input)
>>> # target output size of 7x9x8
>>> m = nn.AdaptiveMaxPool3d((7, None, None))
>>> input = torch.randn(1, 64, 10, 9, 8)
>>> output = m(input)
Padding layers
ReflectionPad1d
class torch.nn.ReflectionPad1d(padding)
Pads the input tensor using the reflection of the input boundary.
For N-dimensional padding, use torch.nn.functional.pad().
| Parameters: | padding (int, tuple) – the size of the padding. If is int, uses the same padding in all boundaries. If a 2-tuple, uses ( , ,  ) ) |
|---|
Shape:
- Input:

- Output:
 where
where 
Examples:
>>> m = nn.ReflectionPad1d(2)
>>> input = torch.arange(8, dtype=torch.float).reshape(1, 2, 4)
>>> input
tensor([[[0., 1., 2., 3.],
[4., 5., 6., 7.]]])
>>> m(input)
tensor([[[2., 1., 0., 1., 2., 3., 2., 1.],
[6., 5., 4., 5., 6., 7., 6., 5.]]])
>>> m(input)
tensor([[[2., 1., 0., 1., 2., 3., 2., 1.],
[6., 5., 4., 5., 6., 7., 6., 5.]]])
>>> # using different paddings for different sides
>>> m = nn.ReflectionPad1d((3, 1))
>>> m(input)
tensor([[[3., 2., 1., 0., 1., 2., 3., 2.],
[7., 6., 5., 4., 5., 6., 7., 6.]]])
ReflectionPad2d
class torch.nn.ReflectionPad2d(padding)
Pads the input tensor using the reflection of the input boundary.
For N-dimensional padding, use torch.nn.functional.pad().
| Parameters: | padding (int, tuple) – the size of the padding. If is int, uses the same padding in all boundaries. If a 4-tuple, uses ( , ,  , ,  , ,  ) ) |
|---|
Shape:
Input:

Output:
 where
where

Examples:
>>> m = nn.ReflectionPad2d(2)
>>> input = torch.arange(9, dtype=torch.float).reshape(1, 1, 3, 3)
>>> input
tensor([[[[0., 1., 2.],
[3., 4., 5.],
[6., 7., 8.]]]])
>>> m(input)
tensor([[[[8., 7., 6., 7., 8., 7., 6.],
[5., 4., 3., 4., 5., 4., 3.],
[2., 1., 0., 1., 2., 1., 0.],
[5., 4., 3., 4., 5., 4., 3.],
[8., 7., 6., 7., 8., 7., 6.],
[5., 4., 3., 4., 5., 4., 3.],
[2., 1., 0., 1., 2., 1., 0.]]]])
>>> # using different paddings for different sides
>>> m = nn.ReflectionPad2d((1, 1, 2, 0))
>>> m(input)
tensor([[[[7., 6., 7., 8., 7.],
[4., 3., 4., 5., 4.],
[1., 0., 1., 2., 1.],
[4., 3., 4., 5., 4.],
[7., 6., 7., 8., 7.]]]])
ReplicationPad1d
class torch.nn.ReplicationPad1d(padding)
Pads the input tensor using replication of the input boundary.
For N-dimensional padding, use torch.nn.functional.pad().
| Parameters: | padding (int, tuple) – the size of the padding. If is int, uses the same padding in all boundaries. If a 2-tuple, uses ( , ,  ) ) |
|---|
Shape:
- Input:

- Output:
 where
where 
Examples:
>>> m = nn.ReplicationPad1d(2)
>>> input = torch.arange(8, dtype=torch.float).reshape(1, 2, 4)
>>> input
tensor([[[0., 1., 2., 3.],
[4., 5., 6., 7.]]])
>>> m(input)
tensor([[[0., 0., 0., 1., 2., 3., 3., 3.],
[4., 4., 4., 5., 6., 7., 7., 7.]]])
>>> # using different paddings for different sides
>>> m = nn.ReplicationPad1d((3, 1))
>>> m(input)
tensor([[[0., 0., 0., 0., 1., 2., 3., 3.],
[4., 4., 4., 4., 5., 6., 7., 7.]]])
ReplicationPad2d
class torch.nn.ReplicationPad2d(padding)
Pads the input tensor using replication of the input boundary.
For N-dimensional padding, use torch.nn.functional.pad().
| Parameters: | padding (int, tuple) – the size of the padding. If is int, uses the same padding in all boundaries. If a 4-tuple, uses ( , ,  , ,  , ,  ) ) |
|---|
Shape:
- Input:

- Output:
 where
where 

Examples:
>>> m = nn.ReplicationPad2d(2)
>>> input = torch.arange(9, dtype=torch.float).reshape(1, 1, 3, 3)
>>> input
tensor([[[[0., 1., 2.],
[3., 4., 5.],
[6., 7., 8.]]]])
>>> m(input)
tensor([[[[0., 0., 0., 1., 2., 2., 2.],
[0., 0., 0., 1., 2., 2., 2.],
[0., 0., 0., 1., 2., 2., 2.],
[3., 3., 3., 4., 5., 5., 5.],
[6., 6., 6., 7., 8., 8., 8.],
[6., 6., 6., 7., 8., 8., 8.],
[6., 6., 6., 7., 8., 8., 8.]]]])
>>> # using different paddings for different sides
>>> m = nn.ReplicationPad2d((1, 1, 2, 0))
>>> m(input)
tensor([[[[0., 0., 1., 2., 2.],
[0., 0., 1., 2., 2.],
[0., 0., 1., 2., 2.],
[3., 3., 4., 5., 5.],
[6., 6., 7., 8., 8.]]]])
ReplicationPad3d
class torch.nn.ReplicationPad3d(padding)
Pads the input tensor using replication of the input boundary.
For N-dimensional padding, use torch.nn.functional.pad().
| Parameters: | padding (int, tuple) – the size of the padding. If is int, uses the same padding in all boundaries. If a 6-tuple, uses ( , ,  , ,  , ,  , ,  , ,  ) ) |
|---|
Shape:
- Input:

- Output:
 where
where 


Examples:
>>> m = nn.ReplicationPad3d(3)
>>> input = torch.randn(16, 3, 8, 320, 480)
>>> output = m(input)
>>> # using different paddings for different sides
>>> m = nn.ReplicationPad3d((3, 3, 6, 6, 1, 1))
>>> output = m(input)
ZeroPad2d
class torch.nn.ZeroPad2d(padding)
Pads the input tensor boundaries with zero.
For N-dimensional padding, use torch.nn.functional.pad().
| Parameters: | padding (int, tuple) – the size of the padding. If is int, uses the same padding in all boundaries. If a 4-tuple, uses ( , ,  , ,  , ,  ) ) |
|---|
Shape:
- Input:

- Output:
 where
where 

Examples:
>>> m = nn.ZeroPad2d(2)
>>> input = torch.randn(1, 1, 3, 3)
>>> input
tensor([[[[-0.1678, -0.4418, 1.9466],
[ 0.9604, -0.4219, -0.5241],
[-0.9162, -0.5436, -0.6446]]]])
>>> m(input)
tensor([[[[ 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[ 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[ 0.0000, 0.0000, -0.1678, -0.4418, 1.9466, 0.0000, 0.0000],
[ 0.0000, 0.0000, 0.9604, -0.4219, -0.5241, 0.0000, 0.0000],
[ 0.0000, 0.0000, -0.9162, -0.5436, -0.6446, 0.0000, 0.0000],
[ 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[ 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000]]]])
>>> # using different paddings for different sides
>>> m = nn.ZeroPad2d((1, 1, 2, 0))
>>> m(input)
tensor([[[[ 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[ 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[ 0.0000, -0.1678, -0.4418, 1.9466, 0.0000],
[ 0.0000, 0.9604, -0.4219, -0.5241, 0.0000],
[ 0.0000, -0.9162, -0.5436, -0.6446, 0.0000]]]])
ConstantPad1d
class torch.nn.ConstantPad1d(padding, value)
Pads the input tensor boundaries with a constant value.
For N-dimensional padding, use torch.nn.functional.pad().
| Parameters: | padding (int, tuple) – the size of the padding. If is int, uses the same padding in both boundaries. If a 2-tuple, uses ( , ,  ) ) |
|---|
Shape:
- Input:

- Output:
 where
where 
Examples:
>>> m = nn.ConstantPad1d(2, 3.5)
>>> input = torch.randn(1, 2, 4)
>>> input
tensor([[[-1.0491, -0.7152, -0.0749, 0.8530],
[-1.3287, 1.8966, 0.1466, -0.2771]]])
>>> m(input)
tensor([[[ 3.5000, 3.5000, -1.0491, -0.7152, -0.0749, 0.8530, 3.5000,
3.5000],
[ 3.5000, 3.5000, -1.3287, 1.8966, 0.1466, -0.2771, 3.5000,
3.5000]]])
>>> m = nn.ConstantPad1d(2, 3.5)
>>> input = torch.randn(1, 2, 3)
>>> input
tensor([[[ 1.6616, 1.4523, -1.1255],
[-3.6372, 0.1182, -1.8652]]])
>>> m(input)
tensor([[[ 3.5000, 3.5000, 1.6616, 1.4523, -1.1255, 3.5000, 3.5000],
[ 3.5000, 3.5000, -3.6372, 0.1182, -1.8652, 3.5000, 3.5000]]])
>>> # using different paddings for different sides
>>> m = nn.ConstantPad1d((3, 1), 3.5)
>>> m(input)
tensor([[[ 3.5000, 3.5000, 3.5000, 1.6616, 1.4523, -1.1255, 3.5000],
[ 3.5000, 3.5000, 3.5000, -3.6372, 0.1182, -1.8652, 3.5000]]])
ConstantPad2d
class torch.nn.ConstantPad2d(padding, value)
Pads the input tensor boundaries with a constant value.
For N-dimensional padding, use torch.nn.functional.pad().
| Parameters: | padding (int, tuple) – the size of the padding. If is int, uses the same padding in all boundaries. If a 4-tuple, uses ( , ,  , ,  , ,  ) ) |
|---|
Shape:
- Input:

- Output:
 where
where 

Examples:
>>> m = nn.ConstantPad2d(2, 3.5)
>>> input = torch.randn(1, 2, 2)
>>> input
tensor([[[ 1.6585, 0.4320],
[-0.8701, -0.4649]]])
>>> m(input)
tensor([[[ 3.5000, 3.5000, 3.5000, 3.5000, 3.5000, 3.5000],
[ 3.5000, 3.5000, 3.5000, 3.5000, 3.5000, 3.5000],
[ 3.5000, 3.5000, 1.6585, 0.4320, 3.5000, 3.5000],
[ 3.5000, 3.5000, -0.8701, -0.4649, 3.5000, 3.5000],
[ 3.5000, 3.5000, 3.5000, 3.5000, 3.5000, 3.5000],
[ 3.5000, 3.5000, 3.5000, 3.5000, 3.5000, 3.5000]]])
>>> m(input)
tensor([[[ 3.5000, 3.5000, 3.5000, 3.5000, 3.5000, 3.5000],
[ 3.5000, 3.5000, 3.5000, 3.5000, 3.5000, 3.5000],
[ 3.5000, 3.5000, 1.6585, 0.4320, 3.5000, 3.5000],
[ 3.5000, 3.5000, -0.8701, -0.4649, 3.5000, 3.5000],
[ 3.5000, 3.5000, 3.5000, 3.5000, 3.5000, 3.5000],
[ 3.5000, 3.5000, 3.5000, 3.5000, 3.5000, 3.5000]]])
>>> # using different paddings for different sides
>>> m = nn.ConstantPad2d((3, 0, 2, 1), 3.5)
>>> m(input)
tensor([[[ 3.5000, 3.5000, 3.5000, 3.5000, 3.5000],
[ 3.5000, 3.5000, 3.5000, 3.5000, 3.5000],
[ 3.5000, 3.5000, 3.5000, 1.6585, 0.4320],
[ 3.5000, 3.5000, 3.5000, -0.8701, -0.4649],
[ 3.5000, 3.5000, 3.5000, 3.5000, 3.5000]]])
ConstantPad3d
class torch.nn.ConstantPad3d(padding, value)
Pads the input tensor boundaries with a constant value.
For N-dimensional padding, use torch.nn.functional.pad().
| Parameters: | padding (int, tuple) – the size of the padding. If is int, uses the same padding in all boundaries. If a 6-tuple, uses ( , ,  , ,  , ,  , ,  , ,  ) ) |
|---|
Shape:
- Input:

- Output:
 where
where 


Examples:
>>> m = nn.ConstantPad3d(3, 3.5)
>>> input = torch.randn(16, 3, 10, 20, 30)
>>> output = m(input)
>>> # using different paddings for different sides
>>> m = nn.ConstantPad3d((3, 3, 6, 6, 0, 1), 3.5)
>>> output = m(input)
Non-linear activations (weighted sum, nonlinearity)
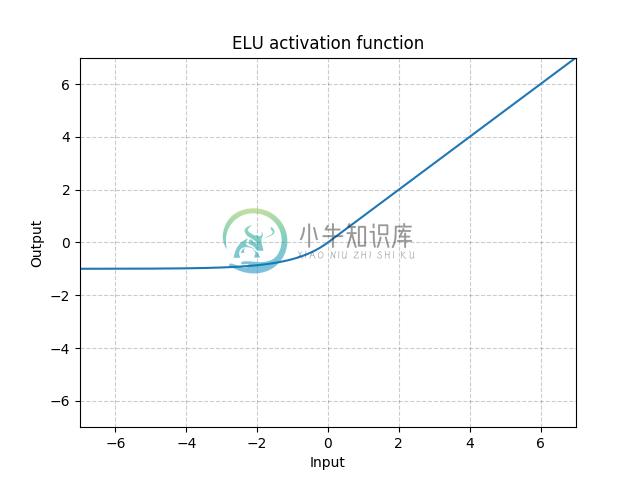
ELU
class torch.nn.ELU(alpha=1.0, inplace=False)
Applies the element-wise function:

Parameters:
- alpha – the
 value for the ELU formulation. Default: 1.0
value for the ELU formulation. Default: 1.0 - inplace – can optionally do the operation in-place. Default:
False
Shape:
- Input:
 where
where *means, any number of additional dimensions - Output:
 , same shape as the input
, same shape as the input
Examples:
>>> m = nn.ELU()
>>> input = torch.randn(2)
>>> output = m(input)
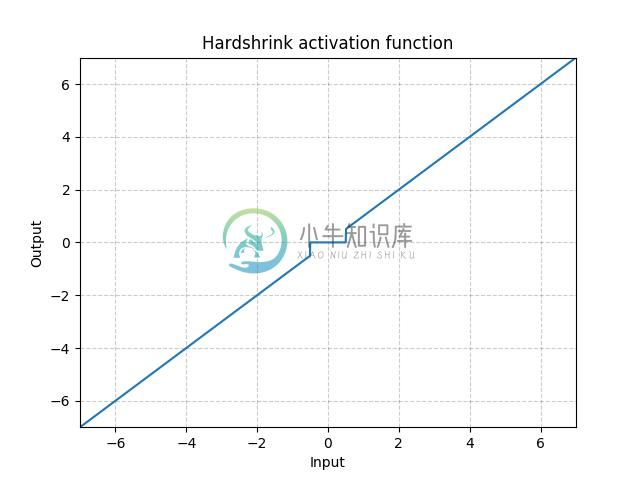
Hardshrink
class torch.nn.Hardshrink(lambd=0.5)
Applies the hard shrinkage function element-wise:
| Parameters: | lambd – the  value for the Hardshrink formulation. Default: 0.5 value for the Hardshrink formulation. Default: 0.5 |
|---|
Shape:
- Input:
 where
where *means, any number of additional dimensions - Output:
 , same shape as the input
, same shape as the input
Examples:
>>> m = nn.Hardshrink()
>>> input = torch.randn(2)
>>> output = m(input)
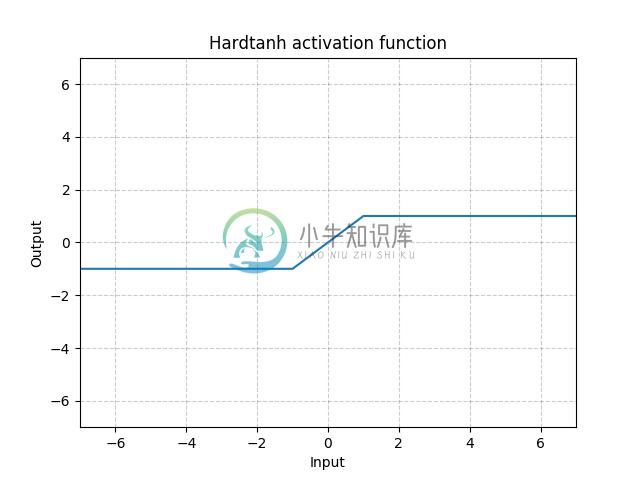
Hardtanh
class torch.nn.Hardtanh(min_val=-1.0, max_val=1.0, inplace=False, min_value=None, max_value=None)
Applies the HardTanh function element-wise
HardTanh is defined as:
The range of the linear region  can be adjusted using
can be adjusted using min_val and max_val.
Parameters:
- min_val – minimum value of the linear region range. Default: -1
- max_val – maximum value of the linear region range. Default: 1
- inplace – can optionally do the operation in-place. Default:
False
Keyword arguments min_value and max_value have been deprecated in favor of min_val and max_val.
Shape:
- Input:
 where
where *means, any number of additional dimensions - Output:
 , same shape as the input
, same shape as the input
Examples:
>>> m = nn.Hardtanh(-2, 2)
>>> input = torch.randn(2)
>>> output = m(input)
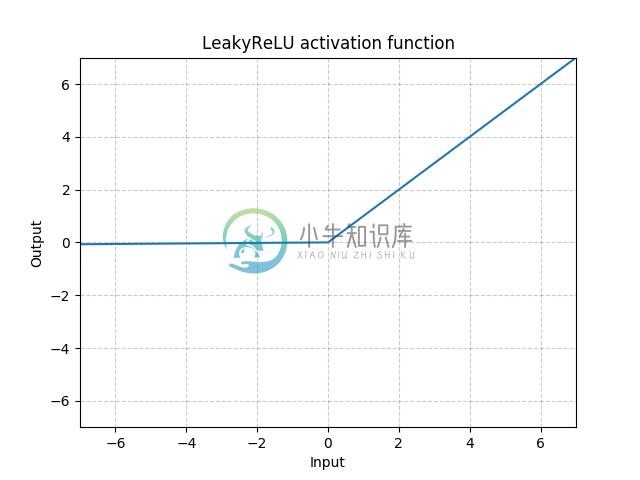
LeakyReLU
class torch.nn.LeakyReLU(negative_slope=0.01, inplace=False)
Applies the element-wise function:

or

Parameters:
- negative_slope – Controls the angle of the negative slope. Default: 1e-2
- inplace – can optionally do the operation in-place. Default:
False
Shape:
- Input:
 where
where *means, any number of additional dimensions - Output:
 , same shape as the input
, same shape as the input
Examples:
>>> m = nn.LeakyReLU(0.1)
>>> input = torch.randn(2)
>>> output = m(input)
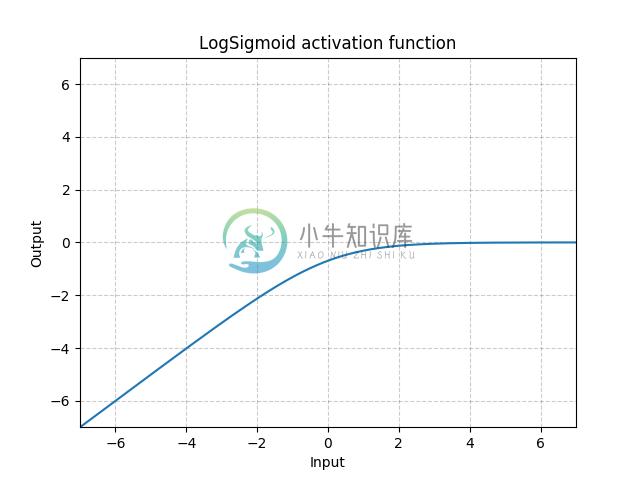
LogSigmoid
class torch.nn.LogSigmoid
Applies the element-wise function:
Shape:
- Input:
 where
where *means, any number of additional dimensions - Output:
 , same shape as the input
, same shape as the input
Examples:
>>> m = nn.LogSigmoid()
>>> input = torch.randn(2)
>>> output = m(input)
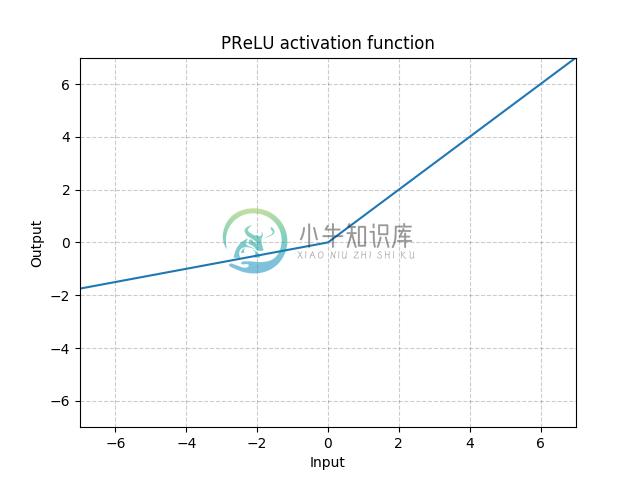
PReLU
class torch.nn.PReLU(num_parameters=1, init=0.25)
Applies the element-wise function:

or
Here  is a learnable parameter. When called without arguments,
is a learnable parameter. When called without arguments, nn.PReLU() uses a single parameter  across all input channels. If called with
across all input channels. If called with nn.PReLU(nChannels), a separate  is used for each input channel.
is used for each input channel.
Note
weight decay should not be used when learning  for good performance.
for good performance.
Note
Channel dim is the 2nd dim of input. When input has dims < 2, then there is no channel dim and the number of channels = 1.
Parameters:
- num_parameters (int) – number of
 to learn. Although it takes an int as input, there is only two values are legitimate: 1, or the number of channels at input. Default: 1
to learn. Although it takes an int as input, there is only two values are legitimate: 1, or the number of channels at input. Default: 1 - init (float) – the initial value of
 . Default: 0.25
. Default: 0.25
Shape:
- Input:
 where
where *means, any number of additional dimensions - Output:
 , same shape as the input
, same shape as the input
| Variables: | weight (Tensor) – the learnable weights of shape (attr:num_parameters). The attr:dtype is default to |
|---|
Examples:
>>> m = nn.PReLU()
>>> input = torch.randn(2)
>>> output = m(input)
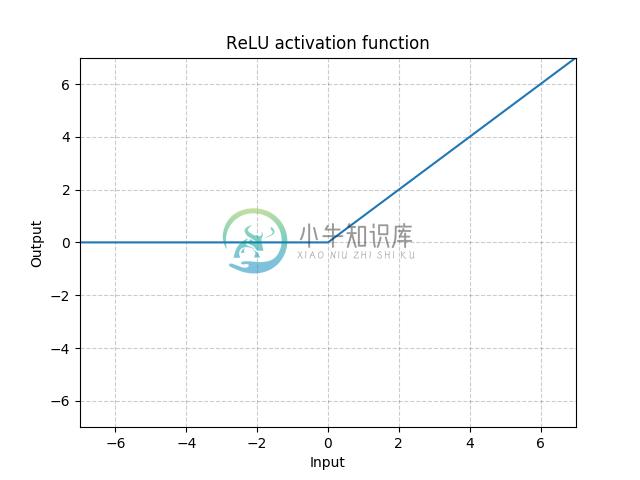
ReLU
class torch.nn.ReLU(inplace=False)
Applies the rectified linear unit function element-wise 
| Parameters: | inplace – can optionally do the operation in-place. Default: False |
|---|
Shape:
- Input:
 where
where *means, any number of additional dimensions - Output:
 , same shape as the input
, same shape as the input
Examples:
>>> m = nn.ReLU()
>>> input = torch.randn(2)
>>> output = m(input)
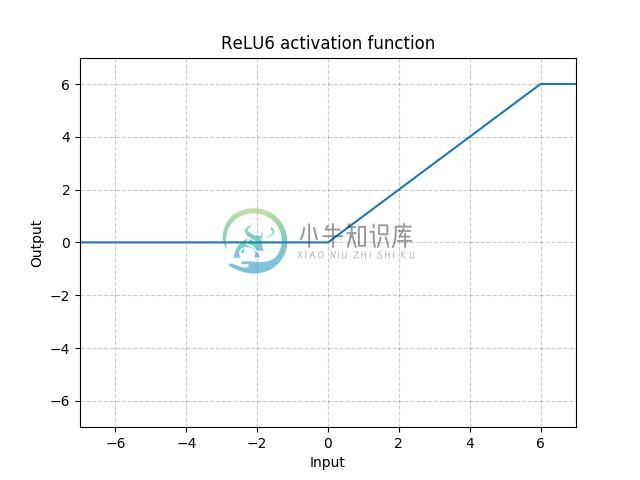
ReLU6
class torch.nn.ReLU6(inplace=False)
Applies the element-wise function:

| Parameters: | inplace – can optionally do the operation in-place. Default: False |
|---|
Shape:
- Input:
 where
where *means, any number of additional dimensions - Output:
 , same shape as the input
, same shape as the input
Examples:
>>> m = nn.ReLU6()
>>> input = torch.randn(2)
>>> output = m(input)
RReLU
class torch.nn.RReLU(lower=0.125, upper=0.3333333333333333, inplace=False)
Applies the randomized leaky rectified liner unit function, element-wise, as described in the paper:
Empirical Evaluation of Rectified Activations in Convolutional Network.
The function is defined as:
where  is randomly sampled from uniform distribution
is randomly sampled from uniform distribution  .
.
See: https://arxiv.org/pdf/1505.00853.pdf
Parameters:
- lower – lower bound of the uniform distribution. Default:

- upper – upper bound of the uniform distribution. Default:

- inplace – can optionally do the operation in-place. Default:
False
Shape:
- Input:
 where
where *means, any number of additional dimensions - Output:
 , same shape as the input
, same shape as the input
Examples:
>>> m = nn.RReLU(0.1, 0.3)
>>> input = torch.randn(2)
>>> output = m(input)
SELU
class torch.nn.SELU(inplace=False)
Applied element-wise, as:

with  and
and  .
.
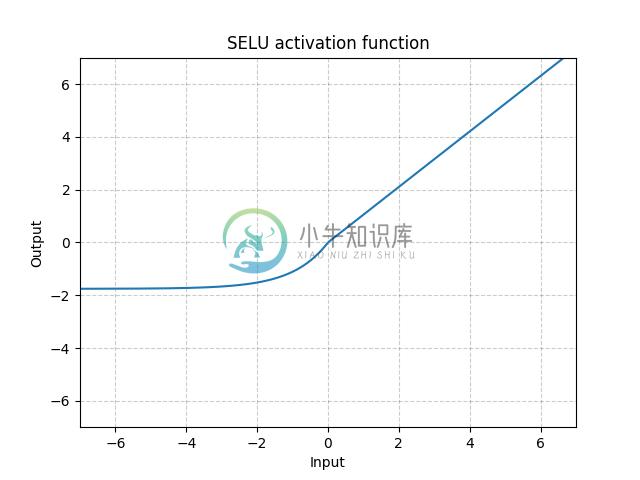
More details can be found in the paper Self-Normalizing Neural Networks .
| Parameters: | inplace (bool, optional) – can optionally do the operation in-place. Default: False |
|---|
Shape:
- Input:
 where
where *means, any number of additional dimensions - Output:
 , same shape as the input
, same shape as the input
Examples:
>>> m = nn.SELU()
>>> input = torch.randn(2)
>>> output = m(input)
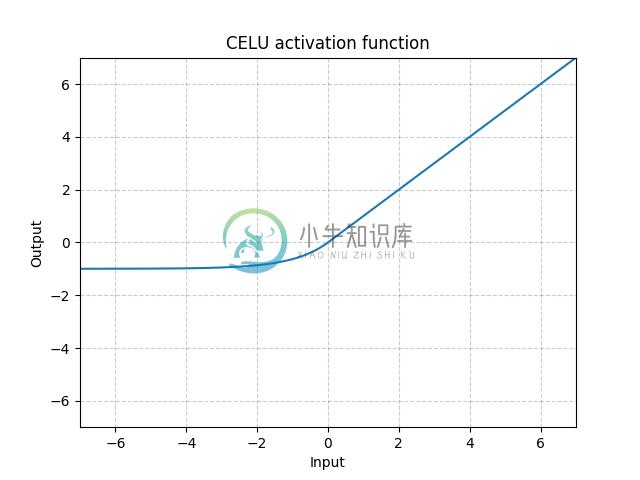
CELU
class torch.nn.CELU(alpha=1.0, inplace=False)
Applies the element-wise function:

More details can be found in the paper Continuously Differentiable Exponential Linear Units .
Parameters:
- alpha – the
 value for the CELU formulation. Default: 1.0
value for the CELU formulation. Default: 1.0 - inplace – can optionally do the operation in-place. Default:
False
Shape:
- Input:
 where
where *means, any number of additional dimensions - Output:
 , same shape as the input
, same shape as the input
Examples:
>>> m = nn.CELU()
>>> input = torch.randn(2)
>>> output = m(input)
Sigmoid
class torch.nn.Sigmoid
Applies the element-wise function:

Shape:
- Input:
 where
where *means, any number of additional dimensions - Output:
 , same shape as the input
, same shape as the input
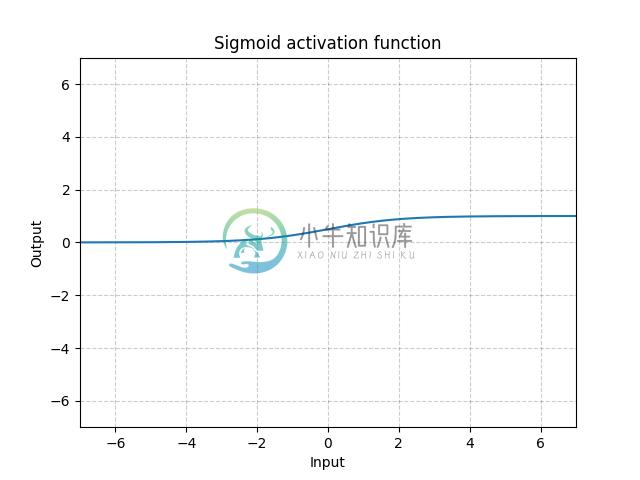
Examples:
>>> m = nn.Sigmoid()
>>> input = torch.randn(2)
>>> output = m(input)
Softplus
class torch.nn.Softplus(beta=1, threshold=20)
Applies the element-wise function:

SoftPlus is a smooth approximation to the ReLU function and can be used to constrain the output of a machine to always be positive.
For numerical stability the implementation reverts to the linear function for inputs above a certain value.
Parameters:
- beta – the
 value for the Softplus formulation. Default: 1
value for the Softplus formulation. Default: 1 - threshold – values above this revert to a linear function. Default: 20
Shape:
- Input:
 where
where *means, any number of additional dimensions - Output:
 , same shape as the input
, same shape as the input
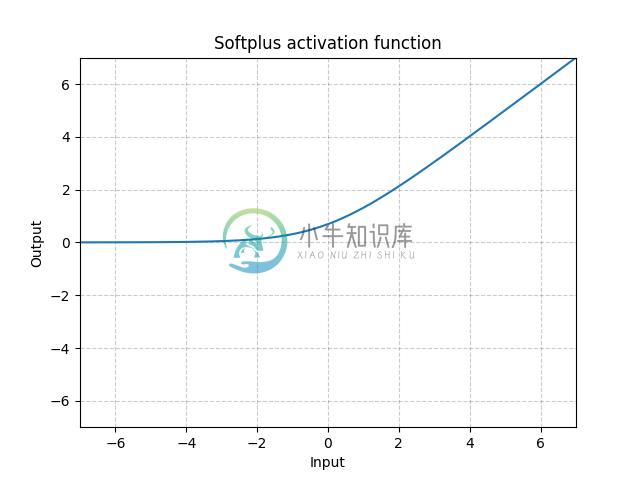
Examples:
>>> m = nn.Softplus()
>>> input = torch.randn(2)
>>> output = m(input)
Softshrink
class torch.nn.Softshrink(lambd=0.5)
Applies the soft shrinkage function elementwise:
| Parameters: | lambd – the  value for the Softshrink formulation. Default: 0.5 value for the Softshrink formulation. Default: 0.5 |
|---|
Shape:
- Input:
 where
where *means, any number of additional dimensions - Output:
 , same shape as the input
, same shape as the input
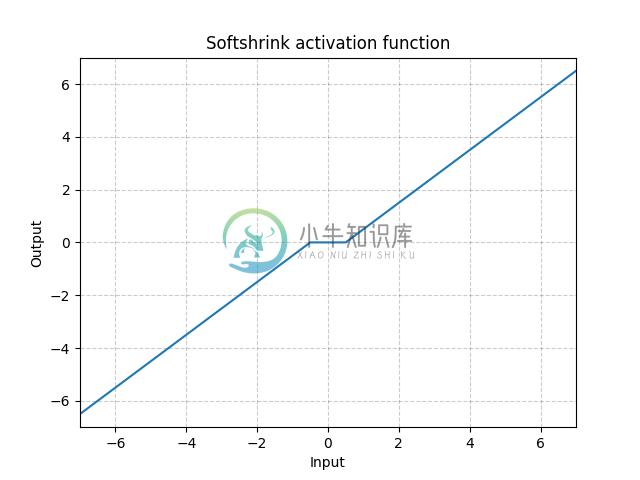
Examples:
>>> m = nn.Softshrink()
>>> input = torch.randn(2)
>>> output = m(input)
Softsign
class torch.nn.Softsign
Applies the element-wise function:
Shape:
- Input:
 where
where *means, any number of additional dimensions - Output:
 , same shape as the input
, same shape as the input
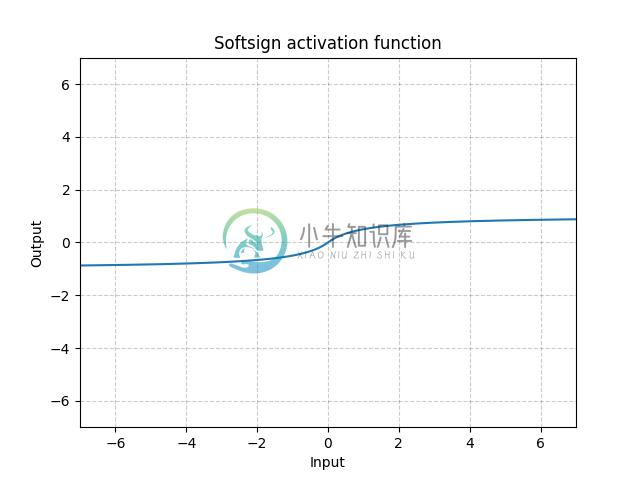
Examples:
>>> m = nn.Softsign()
>>> input = torch.randn(2)
>>> output = m(input)
Tanh
class torch.nn.Tanh
Applies the element-wise function:

Shape:
- Input:
 where
where *means, any number of additional dimensions - Output:
 , same shape as the input
, same shape as the input
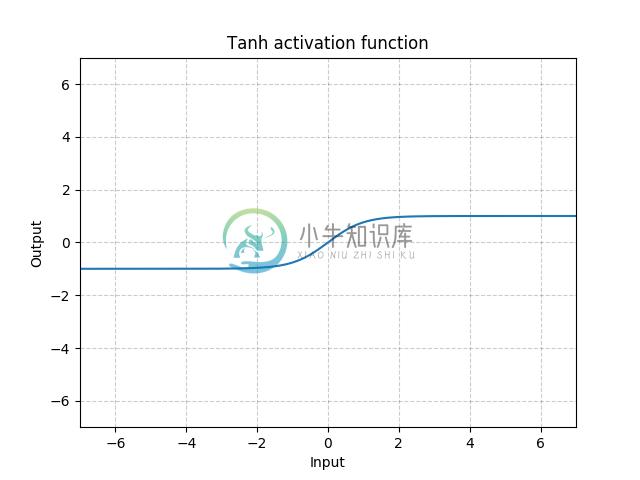
Examples:
>>> m = nn.Tanh()
>>> input = torch.randn(2)
>>> output = m(input)
Tanhshrink
class torch.nn.Tanhshrink
Applies the element-wise function:

Shape:
- Input:
 where
where *means, any number of additional dimensions - Output:
 , same shape as the input
, same shape as the input
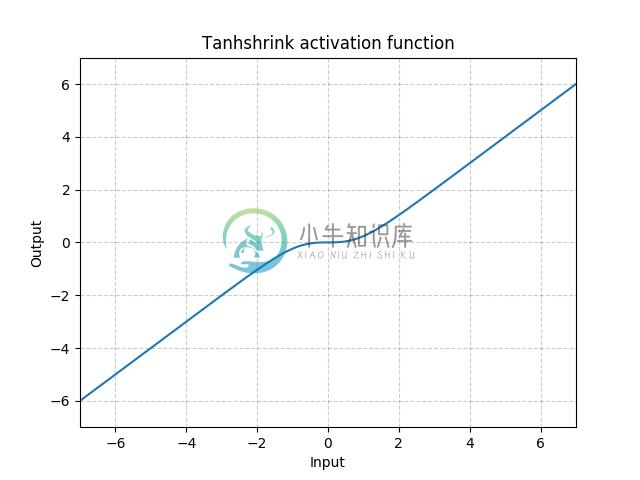
Examples:
>>> m = nn.Tanhshrink()
>>> input = torch.randn(2)
>>> output = m(input)
Threshold
class torch.nn.Threshold(threshold, value, inplace=False)
Thresholds each element of the input Tensor
Threshold is defined as:
Parameters:
- threshold – The value to threshold at
- value – The value to replace with
- inplace – can optionally do the operation in-place. Default:
False
Shape:
- Input:
 where
where *means, any number of additional dimensions - Output:
 , same shape as the input
, same shape as the input
Examples:
>>> m = nn.Threshold(0.1, 20)
>>> input = torch.randn(2)
>>> output = m(input)
Non-linear activations (other)
Softmin
class torch.nn.Softmin(dim=None)
Applies the Softmin function to an n-dimensional input Tensor rescaling them so that the elements of the n-dimensional output Tensor lie in the range (0, 1) and sum to 1
Shape:
- Input: any shape
- Output: same as input
| Parameters: | dim (int) – A dimension along which Softmin will be computed (so every slice along dim will sum to 1). |
|---|---|
| Returns: | a Tensor of the same dimension and shape as the input, with values in the range [0, 1] |
| --- | --- |
Examples:
>>> m = nn.Softmin()
>>> input = torch.randn(2, 3)
>>> output = m(input)
Softmax
class torch.nn.Softmax(dim=None)
Applies the Softmax function to an n-dimensional input Tensor rescaling them so that the elements of the n-dimensional output Tensor lie in the range (0,1) and sum to 1
Softmax is defined as:
Shape:
- Input: any shape
- Output: same as input
| Returns: | a Tensor of the same dimension and shape as the input with values in the range [0, 1] |
|---|---|
| Parameters: | dim (int) – A dimension along which Softmax will be computed (so every slice along dim will sum to 1). |
| --- | --- |
Note
This module doesn’t work directly with NLLLoss, which expects the Log to be computed between the Softmax and itself. Use LogSoftmax instead (it’s faster and has better numerical properties).
Examples:
>>> m = nn.Softmax()
>>> input = torch.randn(2, 3)
>>> output = m(input)
Softmax2d
class torch.nn.Softmax2d
Applies SoftMax over features to each spatial location.
When given an image of Channels x Height x Width, it will apply Softmax to each location 
Shape:
- Input:

- Output:
 (same shape as input)
(same shape as input)
| Returns: | a Tensor of the same dimension and shape as the input with values in the range [0, 1] |
|---|
Examples:
>>> m = nn.Softmax2d()
>>> # you softmax over the 2nd dimension
>>> input = torch.randn(2, 3, 12, 13)
>>> output = m(input)
LogSoftmax
class torch.nn.LogSoftmax(dim=None)
Applies the  function to an n-dimensional input Tensor. The LogSoftmax formulation can be simplified as:
function to an n-dimensional input Tensor. The LogSoftmax formulation can be simplified as:

Shape:
- Input: any shape
- Output: same as input
| Parameters: | dim (int) – A dimension along which Softmax will be computed (so every slice along dim will sum to 1). |
|---|---|
| Returns: | a Tensor of the same dimension and shape as the input with values in the range [-inf, 0) |
| --- | --- |
Examples:
>>> m = nn.LogSoftmax()
>>> input = torch.randn(2, 3)
>>> output = m(input)
AdaptiveLogSoftmaxWithLoss
class torch.nn.AdaptiveLogSoftmaxWithLoss(in_features, n_classes, cutoffs, div_value=4.0, head_bias=False)
Efficient softmax approximation as described in Efficient softmax approximation for GPUs by Edouard Grave, Armand Joulin, Moustapha Cissé, David Grangier, and Hervé Jégou.
Adaptive softmax is an approximate strategy for training models with large output spaces. It is most effective when the label distribution is highly imbalanced, for example in natural language modelling, where the word frequency distribution approximately follows the Zipf’s law.
Adaptive softmax partitions the labels into several clusters, according to their frequency. These clusters may contain different number of targets each. Additionally, clusters containing less frequent labels assign lower dimensional embeddings to those labels, which speeds up the computation. For each minibatch, only clusters for which at least one target is present are evaluated.
The idea is that the clusters which are accessed frequently (like the first one, containing most frequent labels), should also be cheap to compute – that is, contain a small number of assigned labels.
We highly recommend taking a look at the original paper for more details.
cutoffsshould be an ordered Sequence of integers sorted in the increasing order. It controls number of clusters and the partitioning of targets into clusters. For example settingcutoffs = [10, 100, 1000]means that first10targets will be assigned to the ‘head’ of the adaptive softmax, targets11, 12, …, 100will be assigned to the first cluster, and targets101, 102, …, 1000will be assigned to the second cluster, while targets1001, 1002, …, n_classes - 1will be assigned to the last, third clusterdiv_valueis used to compute the size of each additional cluster, which is given as , where
, where  is the cluster index (with clusters for less frequent words having larger indices, and indices starting from
is the cluster index (with clusters for less frequent words having larger indices, and indices starting from  ).
).head_biasif set to True, adds a bias term to the ‘head’ of the adaptive softmax. See paper for details. Set to False in the official implementation.
Warning
Labels passed as inputs to this module should be sorted accoridng to their frequency. This means that the most frequent label should be represented by the index 0, and the least frequent label should be represented by the index n_classes - 1.
Note
This module returns a NamedTuple with output and loss fields. See further documentation for details.
Note
To compute log-probabilities for all classes, the log_prob method can be used.
Parameters:
- in_features (int) – Number of features in the input tensor
- n_classes (int) – Number of classes in the dataset.
- cutoffs (Sequence) – Cutoffs used to assign targets to their buckets.
- div_value (float, optional) – value used as an exponent to compute sizes of the clusters. Default: 4.0
| Returns: |
- output is a Tensor of size
Ncontaining computed target log probabilities for each example - loss is a Scalar representing the computed negative log likelihood loss
| Return type: | NamedTuple with output and loss fields |
|---|
Shape:
- input:

- target:
 where each value satisfies
where each value satisfies 
- output:

- loss:
Scalar
log_prob(input)
Computes log probabilities for all 
| Parameters: | input (Tensor) – a minibatch of examples |
|---|---|
| Returns: | log-probabilities of for each class  in range in range  , where , where  is a parameter passed to is a parameter passed to AdaptiveLogSoftmaxWithLoss constructor. |
| --- | --- |
Shape:
- Input:

- Output:

predict(input)
This is equivalent to self.log_pob(input).argmax(dim=1), but is more efficient in some cases.
| Parameters: | input (Tensor) – a minibatch of examples |
|---|---|
| Returns: | a class with the highest probability for each example |
| --- | --- |
| Return type: | output (Tensor) |
| --- | --- |
Shape:
- Input:

- Output:

Normalization layers
BatchNorm1d
class torch.nn.BatchNorm1d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
Applies Batch Normalization over a 2D or 3D input (a mini-batch of 1D inputs with optional additional channel dimension) as described in the paper Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift .
The mean and standard-deviation are calculated per-dimension over the mini-batches and  and
and  are learnable parameter vectors of size
are learnable parameter vectors of size C (where C is the input size). By default, the elements of  are sampled from
are sampled from  and the elements of
and the elements of  are set to 0.
are set to 0.
Also by default, during training this layer keeps running estimates of its computed mean and variance, which are then used for normalization during evaluation. The running estimates are kept with a default momentum of 0.1.
If track_running_stats is set to False, this layer then does not keep running estimates, and batch statistics are instead used during evaluation time as well.
Note
This momentum argument is different from one used in optimizer classes and the conventional notion of momentum. Mathematically, the update rule for running statistics here is  , where
, where  is the estimated statistic and
is the estimated statistic and  is the new observed value.
is the new observed value.
Because the Batch Normalization is done over the C dimension, computing statistics on (N, L) slices, it’s common terminology to call this Temporal Batch Normalization.
Parameters:
- num_features –
 from an expected input of size
from an expected input of size  or
or  from input of size
from input of size 
- eps – a value added to the denominator for numerical stability. Default: 1e-5
- momentum – the value used for the running_mean and running_var computation. Can be set to
Nonefor cumulative moving average (i.e. simple average). Default: 0.1 - affine – a boolean value that when set to
True, this module has learnable affine parameters. Default:True - track_running_stats – a boolean value that when set to
True, this module tracks the running mean and variance, and when set toFalse, this module does not track such statistics and always uses batch statistics in both training and eval modes. Default:True
Shape:
- Input:
 or
or 
- Output:
 or
or  (same shape as input)
(same shape as input)
Examples:
>>> # With Learnable Parameters
>>> m = nn.BatchNorm1d(100)
>>> # Without Learnable Parameters
>>> m = nn.BatchNorm1d(100, affine=False)
>>> input = torch.randn(20, 100)
>>> output = m(input)
BatchNorm2d
class torch.nn.BatchNorm2d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
Applies Batch Normalization over a 4D input (a mini-batch of 2D inputs with additional channel dimension) as described in the paper Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift .
The mean and standard-deviation are calculated per-dimension over the mini-batches and  and
and  are learnable parameter vectors of size
are learnable parameter vectors of size C (where C is the input size). By default, the elements of  are sampled from
are sampled from  and the elements of
and the elements of  are set to 0.
are set to 0.
Also by default, during training this layer keeps running estimates of its computed mean and variance, which are then used for normalization during evaluation. The running estimates are kept with a default momentum of 0.1.
If track_running_stats is set to False, this layer then does not keep running estimates, and batch statistics are instead used during evaluation time as well.
Note
This momentum argument is different from one used in optimizer classes and the conventional notion of momentum. Mathematically, the update rule for running statistics here is  , where
, where  is the estimated statistic and
is the estimated statistic and  is the new observed value.
is the new observed value.
Because the Batch Normalization is done over the C dimension, computing statistics on (N, H, W) slices, it’s common terminology to call this Spatial Batch Normalization.
Parameters:
- num_features –
 from an expected input of size
from an expected input of size 
- eps – a value added to the denominator for numerical stability. Default: 1e-5
- momentum – the value used for the running_mean and running_var computation. Can be set to
Nonefor cumulative moving average (i.e. simple average). Default: 0.1 - affine – a boolean value that when set to
True, this module has learnable affine parameters. Default:True - track_running_stats – a boolean value that when set to
True, this module tracks the running mean and variance, and when set toFalse, this module does not track such statistics and always uses batch statistics in both training and eval modes. Default:True
Shape:
- Input:

- Output:
 (same shape as input)
(same shape as input)
Examples:
>>> # With Learnable Parameters
>>> m = nn.BatchNorm2d(100)
>>> # Without Learnable Parameters
>>> m = nn.BatchNorm2d(100, affine=False)
>>> input = torch.randn(20, 100, 35, 45)
>>> output = m(input)
BatchNorm3d
class torch.nn.BatchNorm3d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
Applies Batch Normalization over a 5D input (a mini-batch of 3D inputs with additional channel dimension) as described in the paper Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift .
The mean and standard-deviation are calculated per-dimension over the mini-batches and  and
and  are learnable parameter vectors of size
are learnable parameter vectors of size C (where C is the input size). By default, the elements of  are sampled from
are sampled from  and the elements of
and the elements of  are set to 0.
are set to 0.
Also by default, during training this layer keeps running estimates of its computed mean and variance, which are then used for normalization during evaluation. The running estimates are kept with a default momentum of 0.1.
If track_running_stats is set to False, this layer then does not keep running estimates, and batch statistics are instead used during evaluation time as well.
Note
This momentum argument is different from one used in optimizer classes and the conventional notion of momentum. Mathematically, the update rule for running statistics here is  , where
, where  is the estimated statistic and
is the estimated statistic and  is the new observed value.
is the new observed value.
Because the Batch Normalization is done over the C dimension, computing statistics on (N, D, H, W) slices, it’s common terminology to call this Volumetric Batch Normalization or Spatio-temporal Batch Normalization.
Parameters:
- num_features –
 from an expected input of size
from an expected input of size 
- eps – a value added to the denominator for numerical stability. Default: 1e-5
- momentum – the value used for the running_mean and running_var computation. Can be set to
Nonefor cumulative moving average (i.e. simple average). Default: 0.1 - affine – a boolean value that when set to
True, this module has learnable affine parameters. Default:True - track_running_stats – a boolean value that when set to
True, this module tracks the running mean and variance, and when set toFalse, this module does not track such statistics and always uses batch statistics in both training and eval modes. Default:True
Shape:
- Input:

- Output:
 (same shape as input)
(same shape as input)
Examples:
>>> # With Learnable Parameters
>>> m = nn.BatchNorm3d(100)
>>> # Without Learnable Parameters
>>> m = nn.BatchNorm3d(100, affine=False)
>>> input = torch.randn(20, 100, 35, 45, 10)
>>> output = m(input)
GroupNorm
class torch.nn.GroupNorm(num_groups, num_channels, eps=1e-05, affine=True)
Applies Group Normalization over a mini-batch of inputs as described in the paper Group Normalization .
The input channels are separated into num_groups groups, each containing num_channels / num_groups channels. The mean and standard-deviation are calculated separately over the each group.  and
and  are learnable per-channel affine transform parameter vectorss of size
are learnable per-channel affine transform parameter vectorss of size num_channels if affine is True.
This layer uses statistics computed from input data in both training and evaluation modes.
Parameters:
- num_groups (int) – number of groups to separate the channels into
- num_channels (int) – number of channels expected in input
- eps – a value added to the denominator for numerical stability. Default: 1e-5
- affine – a boolean value that when set to
True, this module has learnable per-channel affine parameters initialized to ones (for weights) and zeros (for biases). Default:True.
Shape:
- Input:

- Output:
 (same shape as input)
(same shape as input)
Examples:
>>> input = torch.randn(20, 6, 10, 10)
>>> # Separate 6 channels into 3 groups
>>> m = nn.GroupNorm(3, 6)
>>> # Separate 6 channels into 6 groups (equivalent with InstanceNorm)
>>> m = nn.GroupNorm(6, 6)
>>> # Put all 6 channels into a single group (equivalent with LayerNorm)
>>> m = nn.GroupNorm(1, 6)
>>> # Activating the module
>>> output = m(input)
InstanceNorm1d
class torch.nn.InstanceNorm1d(num_features, eps=1e-05, momentum=0.1, affine=False, track_running_stats=False)
Applies Instance Normalization over a 2D or 3D input (a mini-batch of 1D inputs with optional additional channel dimension) as described in the paper Instance Normalization: The Missing Ingredient for Fast Stylization .
The mean and standard-deviation are calculated per-dimension separately for each object in a mini-batch.  and
and  are learnable parameter vectors of size
are learnable parameter vectors of size C (where C is the input size) if affine is True.
By default, this layer uses instance statistics computed from input data in both training and evaluation modes.
If track_running_stats is set to True, during training this layer keeps running estimates of its computed mean and variance, which are then used for normalization during evaluation. The running estimates are kept with a default momentum of 0.1.
Note
This momentum argument is different from one used in optimizer classes and the conventional notion of momentum. Mathematically, the update rule for running statistics here is  , where
, where  is the estimated statistic and
is the estimated statistic and  is the new observed value.
is the new observed value.
Note
InstanceNorm1d and LayerNorm are very similar, but have some subtle differences. InstanceNorm1d is applied on each channel of channeled data like multidimensional time series, but LayerNorm is usually applied on entire sample and often in NLP tasks. Additionaly, LayerNorm applies elementwise affine transform, while InstanceNorm1d usually don’t apply affine transform.
Parameters:
- num_features –
 from an expected input of size
from an expected input of size  or
or  from input of size
from input of size 
- eps – a value added to the denominator for numerical stability. Default: 1e-5
- momentum – the value used for the running_mean and running_var computation. Default: 0.1
- affine – a boolean value that when set to
True, this module has learnable affine parameters, initialized the same way as done for batch normalization. Default:False. - track_running_stats – a boolean value that when set to
True, this module tracks the running mean and variance, and when set toFalse, this module does not track such statistics and always uses batch statistics in both training and eval modes. Default:False
Shape:
- Input:

- Output:
 (same shape as input)
(same shape as input)
Examples:
>>> # Without Learnable Parameters
>>> m = nn.InstanceNorm1d(100)
>>> # With Learnable Parameters
>>> m = nn.InstanceNorm1d(100, affine=True)
>>> input = torch.randn(20, 100, 40)
>>> output = m(input)
InstanceNorm2d
class torch.nn.InstanceNorm2d(num_features, eps=1e-05, momentum=0.1, affine=False, track_running_stats=False)
Applies Instance Normalization over a 4D input (a mini-batch of 2D inputs with additional channel dimension) as described in the paper Instance Normalization: The Missing Ingredient for Fast Stylization .
The mean and standard-deviation are calculated per-dimension separately for each object in a mini-batch.  and
and  are learnable parameter vectors of size
are learnable parameter vectors of size C (where C is the input size) if affine is True.
By default, this layer uses instance statistics computed from input data in both training and evaluation modes.
If track_running_stats is set to True, during training this layer keeps running estimates of its computed mean and variance, which are then used for normalization during evaluation. The running estimates are kept with a default momentum of 0.1.
Note
This momentum argument is different from one used in optimizer classes and the conventional notion of momentum. Mathematically, the update rule for running statistics here is  , where
, where  is the estimated statistic and
is the estimated statistic and  is the new observed value.
is the new observed value.
Note
InstanceNorm2d and LayerNorm are very similar, but have some subtle differences. InstanceNorm2d is applied on each channel of channeled data like RGB images, but LayerNorm is usually applied on entire sample and often in NLP tasks. Additionaly, LayerNorm applies elementwise affine transform, while InstanceNorm2d usually don’t apply affine transform.
Parameters:
- num_features –
 from an expected input of size
from an expected input of size 
- eps – a value added to the denominator for numerical stability. Default: 1e-5
- momentum – the value used for the running_mean and running_var computation. Default: 0.1
- affine – a boolean value that when set to
True, this module has learnable affine parameters, initialized the same way as done for batch normalization. Default:False. - track_running_stats – a boolean value that when set to
True, this module tracks the running mean and variance, and when set toFalse, this module does not track such statistics and always uses batch statistics in both training and eval modes. Default:False
Shape:
- Input:

- Output:
 (same shape as input)
(same shape as input)
Examples:
>>> # Without Learnable Parameters
>>> m = nn.InstanceNorm2d(100)
>>> # With Learnable Parameters
>>> m = nn.InstanceNorm2d(100, affine=True)
>>> input = torch.randn(20, 100, 35, 45)
>>> output = m(input)
InstanceNorm3d
class torch.nn.InstanceNorm3d(num_features, eps=1e-05, momentum=0.1, affine=False, track_running_stats=False)
Applies Instance Normalization over a 5D input (a mini-batch of 3D inputs with additional channel dimension) as described in the paper Instance Normalization: The Missing Ingredient for Fast Stylization .
The mean and standard-deviation are calculated per-dimension separately for each object in a mini-batch.  and
and  are learnable parameter vectors of size C (where C is the input size) if
are learnable parameter vectors of size C (where C is the input size) if affine is True.
By default, this layer uses instance statistics computed from input data in both training and evaluation modes.
If track_running_stats is set to True, during training this layer keeps running estimates of its computed mean and variance, which are then used for normalization during evaluation. The running estimates are kept with a default momentum of 0.1.
Note
This momentum argument is different from one used in optimizer classes and the conventional notion of momentum. Mathematically, the update rule for running statistics here is  , where
, where  is the estimated statistic and
is the estimated statistic and  is the new observed value.
is the new observed value.
Note
InstanceNorm3d and LayerNorm are very similar, but have some subtle differences. InstanceNorm3d is applied on each channel of channeled data like 3D models with RGB color, but LayerNorm is usually applied on entire sample and often in NLP tasks. Additionaly, LayerNorm applies elementwise affine transform, while InstanceNorm3d usually don’t apply affine transform.
Parameters:
- num_features –
 from an expected input of size
from an expected input of size 
- eps – a value added to the denominator for numerical stability. Default: 1e-5
- momentum – the value used for the running_mean and running_var computation. Default: 0.1
- affine – a boolean value that when set to
True, this module has learnable affine parameters, initialized the same way as done for batch normalization. Default:False. - track_running_stats – a boolean value that when set to
True, this module tracks the running mean and variance, and when set toFalse, this module does not track such statistics and always uses batch statistics in both training and eval modes. Default:False
Shape:
- Input:

- Output:
 (same shape as input)
(same shape as input)
Examples:
>>> # Without Learnable Parameters
>>> m = nn.InstanceNorm3d(100)
>>> # With Learnable Parameters
>>> m = nn.InstanceNorm3d(100, affine=True)
>>> input = torch.randn(20, 100, 35, 45, 10)
>>> output = m(input)
LayerNorm
class torch.nn.LayerNorm(normalized_shape, eps=1e-05, elementwise_affine=True)
Applies Layer Normalization over a mini-batch of inputs as described in the paper Layer Normalization .

The mean and standard-deviation are calculated separately over the last certain number dimensions which have to be of the shape specified by normalized_shape.  and
and  are learnable affine transform parameters of
are learnable affine transform parameters of normalized_shape if elementwise_affine is True.
Note
Unlike Batch Normalization and Instance Normalization, which applies scalar scale and bias for each entire channel/plane with the affine option, Layer Normalization applies per-element scale and bias with elementwise_affine.
This layer uses statistics computed from input data in both training and evaluation modes.
Parameters:
normalized_shape (int or list or torch.Size) –
input shape from an expected input of size

If a single integer is used, it is treated as a singleton list, and this module will normalize over the last dimension which is expected to be of that specific size.
eps – a value added to the denominator for numerical stability. Default: 1e-5
elementwise_affine – a boolean value that when set to
True, this module has learnable per-element affine parameters initialized to ones (for weights) and zeros (for biases). Default:True.
Shape:
- Input:

- Output:
 (same shape as input)
(same shape as input)
Examples:
>>> input = torch.randn(20, 5, 10, 10)
>>> # With Learnable Parameters
>>> m = nn.LayerNorm(input.size()[1:])
>>> # Without Learnable Parameters
>>> m = nn.LayerNorm(input.size()[1:], elementwise_affine=False)
>>> # Normalize over last two dimensions
>>> m = nn.LayerNorm([10, 10])
>>> # Normalize over last dimension of size 10
>>> m = nn.LayerNorm(10)
>>> # Activating the module
>>> output = m(input)
LocalResponseNorm
class torch.nn.LocalResponseNorm(size, alpha=0.0001, beta=0.75, k=1.0)
Applies local response normalization over an input signal composed of several input planes, where channels occupy the second dimension. Applies normalization across channels.
Parameters:
- size – amount of neighbouring channels used for normalization
- alpha – multiplicative factor. Default: 0.0001
- beta – exponent. Default: 0.75
- k – additive factor. Default: 1
Shape:
- Input:

- Output:
 (same shape as input)
(same shape as input)
Examples:
>>> lrn = nn.LocalResponseNorm(2)
>>> signal_2d = torch.randn(32, 5, 24, 24)
>>> signal_4d = torch.randn(16, 5, 7, 7, 7, 7)
>>> output_2d = lrn(signal_2d)
>>> output_4d = lrn(signal_4d)
Recurrent layers
RNN
class torch.nn.RNN(*args, **kwargs)
Applies a multi-layer Elman RNN with  or
or  non-linearity to an input sequence.
non-linearity to an input sequence.
For each element in the input sequence, each layer computes the following function:

where  is the hidden state at time
is the hidden state at time t,  is the input at time
is the input at time t, and  is the hidden state of the previous layer at time
is the hidden state of the previous layer at time t-1 or the initial hidden state at time 0. If nonlinearity is ‘relu’, then ReLU is used instead of tanh.
Parameters:
- input_size – The number of expected features in the input
x - hidden_size – The number of features in the hidden state
h - num_layers – Number of recurrent layers. E.g., setting
num_layers=2would mean stacking two RNNs together to form astacked RNN, with the second RNN taking in outputs of the first RNN and computing the final results. Default: 1 - nonlinearity – The non-linearity to use. Can be either ‘tanh’ or ‘relu’. Default: ‘tanh’
- bias – If
False, then the layer does not use bias weightsb_ihandb_hh. Default:True - batch_first – If
True, then the input and output tensors are provided as(batch, seq, feature). Default:False - dropout – If non-zero, introduces a
Dropoutlayer on the outputs of each RNN layer except the last layer, with dropout probability equal todropout. Default: 0 - bidirectional – If
True, becomes a bidirectional RNN. Default:False
Inputs: input, h_0
- input of shape
(seq_len, batch, input_size): tensor containing the features of the input sequence. The input can also be a packed variable length sequence. Seetorch.nn.utils.rnn.pack_padded_sequence()ortorch.nn.utils.rnn.pack_sequence()for details. - h_0 of shape
(num_layers * num_directions, batch, hidden_size): tensor containing the initial hidden state for each element in the batch. Defaults to zero if not provided. If the RNN is bidirectional, num_directions should be 2, else it should be 1.
Outputs: output, h_n
output of shape
(seq_len, batch, num_directions * hidden_size): tensor containing the output features (h_k) from the last layer of the RNN, for eachk. If atorch.nn.utils.rnn.PackedSequencehas been given as the input, the output will also be a packed sequence.For the unpacked case, the directions can be separated using
output.view(seq_len, batch, num_directions, hidden_size), with forward and backward being direction0and1respectively. Similarly, the directions can be separated in the packed case.h_n (num_layers * num_directions, batch, hidden_size): tensor containing the hidden state for
k = seq_len.Like output, the layers can be separated using
h_n.view(num_layers, num_directions, batch, hidden_size).
| Variables: |
- weight_ih_l[k] – the learnable input-hidden weights of the k-th layer, of shape
(hidden_size * input_size)fork = 0. Otherwise, the shape is(hidden_size * hidden_size) - weight_hh_l[k] – the learnable hidden-hidden weights of the k-th layer, of shape
(hidden_size * hidden_size) - bias_ih_l[k] – the learnable input-hidden bias of the k-th layer, of shape
(hidden_size) - bias_hh_l[k] – the learnable hidden-hidden bias of the k-th layer, of shape
(hidden_size)
Note
All the weights and biases are initialized from  where
where 
Note
If the following conditions are satisfied: 1) cudnn is enabled, 2) input data is on the GPU 3) input data has dtype torch.float16 4) V100 GPU is used, 5) input data is not in PackedSequence format persistent algorithm can be selected to improve performance.
Examples:
>>> rnn = nn.RNN(10, 20, 2)
>>> input = torch.randn(5, 3, 10)
>>> h0 = torch.randn(2, 3, 20)
>>> output, hn = rnn(input, h0)
LSTM
class torch.nn.LSTM(*args, **kwargs)
Applies a multi-layer long short-term memory (LSTM) RNN to an input sequence.
For each element in the input sequence, each layer computes the following function:
where  is the hidden state at time
is the hidden state at time t,  is the cell state at time
is the cell state at time t,  is the input at time
is the input at time t,  is the hidden state of the layer at time
is the hidden state of the layer at time t-1 or the initial hidden state at time 0, and  ,
,  ,
,  ,
,  are the input, forget, cell, and output gates, respectively.
are the input, forget, cell, and output gates, respectively.  is the sigmoid function.
is the sigmoid function.
In a multilayer LSTM, the input  of the
of the  -th layer (
-th layer ( ) is the hidden state
) is the hidden state  of the previous layer multiplied by dropout
of the previous layer multiplied by dropout  where each
where each  is a Bernoulli random variable which is
is a Bernoulli random variable which is  with probability
with probability dropout.
Parameters:
- input_size – The number of expected features in the input
x - hidden_size – The number of features in the hidden state
h - num_layers – Number of recurrent layers. E.g., setting
num_layers=2would mean stacking two LSTMs together to form astacked LSTM, with the second LSTM taking in outputs of the first LSTM and computing the final results. Default: 1 - bias – If
False, then the layer does not use bias weightsb_ihandb_hh. Default:True - batch_first – If
True, then the input and output tensors are provided as (batch, seq, feature). Default:False - dropout – If non-zero, introduces a
Dropoutlayer on the outputs of each LSTM layer except the last layer, with dropout probability equal todropout. Default: 0 - bidirectional – If
True, becomes a bidirectional LSTM. Default:False
Inputs: input, (h_0, c_0)
input of shape
(seq_len, batch, input_size): tensor containing the features of the input sequence. The input can also be a packed variable length sequence. Seetorch.nn.utils.rnn.pack_padded_sequence()ortorch.nn.utils.rnn.pack_sequence()for details.h_0 of shape
(num_layers * num_directions, batch, hidden_size): tensor containing the initial hidden state for each element in the batch. If the RNN is bidirectional, num_directions should be 2, else it should be 1.c_0 of shape
(num_layers * num_directions, batch, hidden_size): tensor containing the initial cell state for each element in the batch.If
(h_0, c_0)is not provided, both h_0 and c_0 default to zero.
Outputs: output, (h_n, c_n)
output of shape
(seq_len, batch, num_directions * hidden_size): tensor containing the output features(h_t)from the last layer of the LSTM, for each t. If atorch.nn.utils.rnn.PackedSequencehas been given as the input, the output will also be a packed sequence.For the unpacked case, the directions can be separated using
output.view(seq_len, batch, num_directions, hidden_size), with forward and backward being direction0and1respectively. Similarly, the directions can be separated in the packed case.h_n of shape
(num_layers * num_directions, batch, hidden_size): tensor containing the hidden state fort = seq_len.Like output, the layers can be separated using
h_n.view(num_layers, num_directions, batch, hidden_size)and similarly for c_n.c_n (num_layers * num_directions, batch, hidden_size): tensor containing the cell state for
t = seq_len
| Variables: |
- weight_ih_l[k] – the learnable input-hidden weights of the
 layer
layer (W_ii|W_if|W_ig|W_io), of shape(4*hidden_size x input_size) - weight_hh_l[k] – the learnable hidden-hidden weights of the
 layer
layer (W_hi|W_hf|W_hg|W_ho), of shape(4*hidden_size x hidden_size) - bias_ih_l[k] – the learnable input-hidden bias of the
 layer
layer (b_ii|b_if|b_ig|b_io), of shape(4*hidden_size) - bias_hh_l[k] – the learnable hidden-hidden bias of the
 layer
layer (b_hi|b_hf|b_hg|b_ho), of shape(4*hidden_size)
Note
All the weights and biases are initialized from  where
where 
Note
If the following conditions are satisfied: 1) cudnn is enabled, 2) input data is on the GPU 3) input data has dtype torch.float16 4) V100 GPU is used, 5) input data is not in PackedSequence format persistent algorithm can be selected to improve performance.
Examples:
>>> rnn = nn.LSTM(10, 20, 2)
>>> input = torch.randn(5, 3, 10)
>>> h0 = torch.randn(2, 3, 20)
>>> c0 = torch.randn(2, 3, 20)
>>> output, (hn, cn) = rnn(input, (h0, c0))
GRU
class torch.nn.GRU(*args, **kwargs)
Applies a multi-layer gated recurrent unit (GRU) RNN to an input sequence.
For each element in the input sequence, each layer computes the following function:
where  is the hidden state at time
is the hidden state at time t,  is the input at time
is the input at time t,  is the hidden state of the layer at time
is the hidden state of the layer at time t-1 or the initial hidden state at time 0, and  ,
,  ,
,  are the reset, update, and new gates, respectively.
are the reset, update, and new gates, respectively.  is the sigmoid function.
is the sigmoid function.
In a multilayer GRU, the input  of the
of the  -th layer (
-th layer ( ) is the hidden state
) is the hidden state  of the previous layer multiplied by dropout
of the previous layer multiplied by dropout  where each
where each  is a Bernoulli random variable which is
is a Bernoulli random variable which is  with probability
with probability dropout.
Parameters:
- input_size – The number of expected features in the input
x - hidden_size – The number of features in the hidden state
h - num_layers – Number of recurrent layers. E.g., setting
num_layers=2would mean stacking two GRUs together to form astacked GRU, with the second GRU taking in outputs of the first GRU and computing the final results. Default: 1 - bias – If
False, then the layer does not use bias weightsb_ihandb_hh. Default:True - batch_first – If
True, then the input and output tensors are provided as (batch, seq, feature). Default:False - dropout – If non-zero, introduces a
Dropoutlayer on the outputs of each GRU layer except the last layer, with dropout probability equal todropout. Default: 0 - bidirectional – If
True, becomes a bidirectional GRU. Default:False
Inputs: input, h_0
- input of shape
(seq_len, batch, input_size): tensor containing the features of the input sequence. The input can also be a packed variable length sequence. Seetorch.nn.utils.rnn.pack_padded_sequence()for details. - h_0 of shape
(num_layers * num_directions, batch, hidden_size): tensor containing the initial hidden state for each element in the batch. Defaults to zero if not provided. If the RNN is bidirectional, num_directions should be 2, else it should be 1.
Outputs: output, h_n
output of shape
(seq_len, batch, num_directions * hidden_size): tensor containing the output features h_t from the last layer of the GRU, for each t. If atorch.nn.utils.rnn.PackedSequencehas been given as the input, the output will also be a packed sequence. For the unpacked case, the directions can be separated usingoutput.view(seq_len, batch, num_directions, hidden_size), with forward and backward being direction0and1respectively.Similarly, the directions can be separated in the packed case.
h_n of shape
(num_layers * num_directions, batch, hidden_size): tensor containing the hidden state fort = seq_lenLike output, the layers can be separated using
h_n.view(num_layers, num_directions, batch, hidden_size).
| Variables: |
- weight_ih_l[k] – the learnable input-hidden weights of the
 layer (W_ir|W_iz|W_in), of shape
layer (W_ir|W_iz|W_in), of shape (3*hidden_size x input_size) - weight_hh_l[k] – the learnable hidden-hidden weights of the
 layer (W_hr|W_hz|W_hn), of shape
layer (W_hr|W_hz|W_hn), of shape (3*hidden_size x hidden_size) - bias_ih_l[k] – the learnable input-hidden bias of the
 layer (b_ir|b_iz|b_in), of shape
layer (b_ir|b_iz|b_in), of shape (3*hidden_size) - bias_hh_l[k] – the learnable hidden-hidden bias of the
 layer (b_hr|b_hz|b_hn), of shape
layer (b_hr|b_hz|b_hn), of shape (3*hidden_size)
Note
All the weights and biases are initialized from  where
where 
Note
If the following conditions are satisfied: 1) cudnn is enabled, 2) input data is on the GPU 3) input data has dtype torch.float16 4) V100 GPU is used, 5) input data is not in PackedSequence format persistent algorithm can be selected to improve performance.
Examples:
>>> rnn = nn.GRU(10, 20, 2)
>>> input = torch.randn(5, 3, 10)
>>> h0 = torch.randn(2, 3, 20)
>>> output, hn = rnn(input, h0)
RNNCell
class torch.nn.RNNCell(input_size, hidden_size, bias=True, nonlinearity='tanh')
An Elman RNN cell with tanh or ReLU non-linearity.

If nonlinearity is ‘relu’, then ReLU is used in place of tanh.
Parameters:
- input_size – The number of expected features in the input
x - hidden_size – The number of features in the hidden state
h - bias – If
False, then the layer does not use bias weightsb_ihandb_hh. Default:True - nonlinearity – The non-linearity to use. Can be either ‘tanh’ or ‘relu’. Default: ‘tanh’
Inputs: input, hidden
- input of shape
(batch, input_size): tensor containing input features - hidden of shape
(batch, hidden_size): tensor containing the initial hidden state for each element in the batch. Defaults to zero if not provided.
Outputs: h’
- h’ of shape
(batch, hidden_size): tensor containing the next hidden state for each element in the batch
| Variables: |
- weight_ih – the learnable input-hidden weights, of shape
(hidden_size x input_size) - weight_hh – the learnable hidden-hidden weights, of shape
(hidden_size x hidden_size) - bias_ih – the learnable input-hidden bias, of shape
(hidden_size) - bias_hh – the learnable hidden-hidden bias, of shape
(hidden_size)
Note
All the weights and biases are initialized from  where
where 
Examples:
>>> rnn = nn.RNNCell(10, 20)
>>> input = torch.randn(6, 3, 10)
>>> hx = torch.randn(3, 20)
>>> output = []
>>> for i in range(6):
hx = rnn(input[i], hx)
output.append(hx)
LSTMCell
class torch.nn.LSTMCell(input_size, hidden_size, bias=True)
A long short-term memory (LSTM) cell.
where  is the sigmoid function.
is the sigmoid function.
Parameters:
- input_size – The number of expected features in the input
x - hidden_size – The number of features in the hidden state
h - bias – If
False, then the layer does not use bias weightsb_ihandb_hh. Default:True
Inputs: input, (h_0, c_0)
input of shape
(batch, input_size): tensor containing input featuresh_0 of shape
(batch, hidden_size): tensor containing the initial hidden state for each element in the batch.c_0 of shape
(batch, hidden_size): tensor containing the initial cell state for each element in the batch.If
(h_0, c_0)is not provided, both h_0 and c_0 default to zero.
Outputs: h_1, c_1
- h_1 of shape
(batch, hidden_size): tensor containing the next hidden state for each element in the batch - c_1 of shape
(batch, hidden_size): tensor containing the next cell state for each element in the batch
| Variables: |
- weight_ih – the learnable input-hidden weights, of shape
(4*hidden_size x input_size) - weight_hh – the learnable hidden-hidden weights, of shape
(4*hidden_size x hidden_size) - bias_ih – the learnable input-hidden bias, of shape
(4*hidden_size) - bias_hh – the learnable hidden-hidden bias, of shape
(4*hidden_size)
Note
All the weights and biases are initialized from  where
where 
Examples:
>>> rnn = nn.LSTMCell(10, 20)
>>> input = torch.randn(6, 3, 10)
>>> hx = torch.randn(3, 20)
>>> cx = torch.randn(3, 20)
>>> output = []
>>> for i in range(6):
hx, cx = rnn(input[i], (hx, cx))
output.append(hx)
GRUCell
class torch.nn.GRUCell(input_size, hidden_size, bias=True)
A gated recurrent unit (GRU) cell
where  is the sigmoid function.
is the sigmoid function.
Parameters:
- input_size – The number of expected features in the input
x - hidden_size – The number of features in the hidden state
h - bias – If
False, then the layer does not use bias weightsb_ihandb_hh. Default:True
Inputs: input, hidden
- input of shape
(batch, input_size): tensor containing input features - hidden of shape
(batch, hidden_size): tensor containing the initial hidden state for each element in the batch. Defaults to zero if not provided.
Outputs: h’
- h’ of shape
(batch, hidden_size): tensor containing the next hidden state for each element in the batch
| Variables: |
- weight_ih – the learnable input-hidden weights, of shape
(3*hidden_size x input_size) - weight_hh – the learnable hidden-hidden weights, of shape
(3*hidden_size x hidden_size) - bias_ih – the learnable input-hidden bias, of shape
(3*hidden_size) - bias_hh – the learnable hidden-hidden bias, of shape
(3*hidden_size)
Note
All the weights and biases are initialized from  where
where 
Examples:
>>> rnn = nn.GRUCell(10, 20)
>>> input = torch.randn(6, 3, 10)
>>> hx = torch.randn(3, 20)
>>> output = []
>>> for i in range(6):
hx = rnn(input[i], hx)
output.append(hx)
Linear layers
Linear
class torch.nn.Linear(in_features, out_features, bias=True)
Applies a linear transformation to the incoming data: 
Parameters:
- in_features – size of each input sample
- out_features – size of each output sample
- bias – If set to False, the layer will not learn an additive bias. Default:
True
Shape:
- Input:
 where
where  means any number of additional dimensions
means any number of additional dimensions - Output:
 where all but the last dimension are the same shape as the input.
where all but the last dimension are the same shape as the input.
| Variables: |
- weight – the learnable weights of the module of shape
 . The values are initialized from
. The values are initialized from  , where
, where 
- bias – the learnable bias of the module of shape
 . If
. If biasisTrue, the values are initialized from where
where 
Examples:
>>> m = nn.Linear(20, 30)
>>> input = torch.randn(128, 20)
>>> output = m(input)
>>> print(output.size())
torch.Size([128, 30])
Bilinear
class torch.nn.Bilinear(in1_features, in2_features, out_features, bias=True)
Applies a bilinear transformation to the incoming data: 
Parameters:
- in1_features – size of each first input sample
- in2_features – size of each second input sample
- out_features – size of each output sample
- bias – If set to False, the layer will not learn an additive bias. Default:
True
Shape:
- Input:
 ,
,  where
where  means any number of additional dimensions. All but the last dimension of the inputs should be the same.
means any number of additional dimensions. All but the last dimension of the inputs should be the same. - Output:
 where all but the last dimension are the same shape as the input.
where all but the last dimension are the same shape as the input.
| Variables: |
- weight – the learnable weights of the module of shape
 . The values are initialized from
. The values are initialized from  , where
, where 
- bias – the learnable bias of the module of shape
 If
If biasisTrue, the values are initialized from , where
, where 
Examples:
>>> m = nn.Bilinear(20, 30, 40)
>>> input1 = torch.randn(128, 20)
>>> input2 = torch.randn(128, 30)
>>> output = m(input1, input2)
>>> print(output.size())
torch.Size([128, 40])
Dropout layers
Dropout
class torch.nn.Dropout(p=0.5, inplace=False)
During training, randomly zeroes some of the elements of the input tensor with probability p using samples from a Bernoulli distribution. Each channel will be zeroed out independently on every forward call.
This has proven to be an effective technique for regularization and preventing the co-adaptation of neurons as described in the paper Improving neural networks by preventing co-adaptation of feature detectors .
Furthermore, the outputs are scaled by a factor of  during training. This means that during evaluation the module simply computes an identity function.
during training. This means that during evaluation the module simply computes an identity function.
Parameters:
- p – probability of an element to be zeroed. Default: 0.5
- inplace – If set to
True, will do this operation in-place. Default:False
Shape:
- Input:
Any. Input can be of any shape - Output:
Same. Output is of the same shape as input
Examples:
>>> m = nn.Dropout(p=0.2)
>>> input = torch.randn(20, 16)
>>> output = m(input)
Dropout2d
class torch.nn.Dropout2d(p=0.5, inplace=False)
Randomly zero out entire channels (a channel is a 2D feature map, e.g., the  -th channel of the
-th channel of the  -th sample in the batched input is a 2D tensor
-th sample in the batched input is a 2D tensor  ) of the input tensor). Each channel will be zeroed out independently on every forward call. with probability
) of the input tensor). Each channel will be zeroed out independently on every forward call. with probability p using samples from a Bernoulli distribution.
Usually the input comes from nn.Conv2d modules.
As described in the paper Efficient Object Localization Using Convolutional Networks , if adjacent pixels within feature maps are strongly correlated (as is normally the case in early convolution layers) then i.i.d. dropout will not regularize the activations and will otherwise just result in an effective learning rate decrease.
In this case, nn.Dropout2d() will help promote independence between feature maps and should be used instead.
Parameters:
- p (float, optional) – probability of an element to be zero-ed.
- inplace (bool, optional) – If set to
True, will do this operation in-place
Shape:
- Input:

- Output:
 (same shape as input)
(same shape as input)
Examples:
>>> m = nn.Dropout2d(p=0.2)
>>> input = torch.randn(20, 16, 32, 32)
>>> output = m(input)
Dropout3d
class torch.nn.Dropout3d(p=0.5, inplace=False)
Randomly zero out entire channels (a channel is a 3D feature map, e.g., the  -th channel of the
-th channel of the  -th sample in the batched input is a 3D tensor
-th sample in the batched input is a 3D tensor  ) of the input tensor). Each channel will be zeroed out independently on every forward call. with probability
) of the input tensor). Each channel will be zeroed out independently on every forward call. with probability p using samples from a Bernoulli distribution.
Usually the input comes from nn.Conv3d modules.
As described in the paper Efficient Object Localization Using Convolutional Networks , if adjacent pixels within feature maps are strongly correlated (as is normally the case in early convolution layers) then i.i.d. dropout will not regularize the activations and will otherwise just result in an effective learning rate decrease.
In this case, nn.Dropout3d() will help promote independence between feature maps and should be used instead.
Parameters:
- p (float, optional) – probability of an element to be zeroed.
- inplace (bool, optional) – If set to
True, will do this operation in-place
Shape:
- Input:

- Output:
 (same shape as input)
(same shape as input)
Examples:
>>> m = nn.Dropout3d(p=0.2)
>>> input = torch.randn(20, 16, 4, 32, 32)
>>> output = m(input)
AlphaDropout
class torch.nn.AlphaDropout(p=0.5, inplace=False)
Applies Alpha Dropout over the input.
Alpha Dropout is a type of Dropout that maintains the self-normalizing property. For an input with zero mean and unit standard deviation, the output of Alpha Dropout maintains the original mean and standard deviation of the input. Alpha Dropout goes hand-in-hand with SELU activation function, which ensures that the outputs have zero mean and unit standard deviation.
During training, it randomly masks some of the elements of the input tensor with probability p using samples from a bernoulli distribution. The elements to masked are randomized on every forward call, and scaled and shifted to maintain zero mean and unit standard deviation.
During evaluation the module simply computes an identity function.
More details can be found in the paper Self-Normalizing Neural Networks .
Parameters:
- p (float) – probability of an element to be dropped. Default: 0.5
- inplace (bool, optional) – If set to
True, will do this operation in-place
Shape:
- Input:
Any. Input can be of any shape - Output:
Same. Output is of the same shape as input
Examples:
>>> m = nn.AlphaDropout(p=0.2)
>>> input = torch.randn(20, 16)
>>> output = m(input)
Sparse layers
Embedding
class torch.nn.Embedding(num_embeddings, embedding_dim, padding_idx=None, max_norm=None, norm_type=2.0, scale_grad_by_freq=False, sparse=False, _weight=None)
A simple lookup table that stores embeddings of a fixed dictionary and size.
This module is often used to store word embeddings and retrieve them using indices. The input to the module is a list of indices, and the output is the corresponding word embeddings.
Parameters:
- num_embeddings (int) – size of the dictionary of embeddings
- embedding_dim (int) – the size of each embedding vector
- padding_idx (int, optional) – If given, pads the output with the embedding vector at
padding_idx(initialized to zeros) whenever it encounters the index. - max_norm (float, optional) – If given, each embedding vector with norm larger than
max_normis renormalized to have normmax_norm. - norm_type (float, optional) – The p of the p-norm to compute for the
max_normoption. Default2. - scale_grad_by_freq (boolean_,_ optional) – If given, this will scale gradients by the inverse of frequency of the words in the mini-batch. Default
False. - sparse (bool, optional) – If
True, gradient w.r.t.weightmatrix will be a sparse tensor. See Notes for more details regarding sparse gradients.
| Variables: | weight (Tensor) – the learnable weights of the module of shape (num_embeddings, embedding_dim) initialized from  |
|---|
Shape:
- Input: LongTensor of arbitrary shape containing the indices to extract
- Output:
(*, embedding_dim), where*is the input shape
Note
Keep in mind that only a limited number of optimizers support sparse gradients: currently it’s optim.SGD (CUDA and CPU), optim.SparseAdam (CUDA and CPU) and optim.Adagrad (CPU)
Note
With padding_idx set, the embedding vector at padding_idx is initialized to all zeros. However, note that this vector can be modified afterwards, e.g., using a customized initialization method, and thus changing the vector used to pad the output. The gradient for this vector from Embedding is always zero.
Examples:
>>> # an Embedding module containing 10 tensors of size 3
>>> embedding = nn.Embedding(10, 3)
>>> # a batch of 2 samples of 4 indices each
>>> input = torch.LongTensor([[1,2,4,5],[4,3,2,9]])
>>> embedding(input)
tensor([[[-0.0251, -1.6902, 0.7172],
[-0.6431, 0.0748, 0.6969],
[ 1.4970, 1.3448, -0.9685],
[-0.3677, -2.7265, -0.1685]],
[[ 1.4970, 1.3448, -0.9685],
[ 0.4362, -0.4004, 0.9400],
[-0.6431, 0.0748, 0.6969],
[ 0.9124, -2.3616, 1.1151]]])
>>> # example with padding_idx
>>> embedding = nn.Embedding(10, 3, padding_idx=0)
>>> input = torch.LongTensor([[0,2,0,5]])
>>> embedding(input)
tensor([[[ 0.0000, 0.0000, 0.0000],
[ 0.1535, -2.0309, 0.9315],
[ 0.0000, 0.0000, 0.0000],
[-0.1655, 0.9897, 0.0635]]])
classmethod from_pretrained(embeddings, freeze=True, sparse=False)
Creates Embedding instance from given 2-dimensional FloatTensor.
Parameters:
- embeddings (Tensor) – FloatTensor containing weights for the Embedding. First dimension is being passed to Embedding as ‘num_embeddings’, second as ‘embedding_dim’.
- freeze (boolean_,_ optional) – If
True, the tensor does not get updated in the learning process. Equivalent toembedding.weight.requires_grad = False. Default:True - sparse (bool, optional) – if
True, gradient w.r.t. weight matrix will be a sparse tensor. See Notes for more details regarding sparse gradients.
Examples:
>>> # FloatTensor containing pretrained weights
>>> weight = torch.FloatTensor([[1, 2.3, 3], [4, 5.1, 6.3]])
>>> embedding = nn.Embedding.from_pretrained(weight)
>>> # Get embeddings for index 1
>>> input = torch.LongTensor([1])
>>> embedding(input)
tensor([[ 4.0000, 5.1000, 6.3000]])
EmbeddingBag
class torch.nn.EmbeddingBag(num_embeddings, embedding_dim, max_norm=None, norm_type=2.0, scale_grad_by_freq=False, mode='mean', sparse=False)
Computes sums or means of ‘bags’ of embeddings, without instantiating the intermediate embeddings.
For bags of constant length, this class
- with
mode="sum"is equivalent toEmbeddingfollowed bytorch.sum(dim=1),- with
mode="mean"is equivalent toEmbeddingfollowed bytorch.mean(dim=1),- with
mode="max"is equivalent toEmbeddingfollowed bytorch.max(dim=1).
However, EmbeddingBag is much more time and memory efficient than using a chain of these operations.
Parameters:
- num_embeddings (int) – size of the dictionary of embeddings
- embedding_dim (int) – the size of each embedding vector
- max_norm (float, optional) – If given, each embedding vector with norm larger than
max_normis renormalized to have normmax_norm. - norm_type (float, optional) – The p of the p-norm to compute for the
max_normoption. Default2. - scale_grad_by_freq (boolean_,_ optional) – if given, this will scale gradients by the inverse of frequency of the words in the mini-batch. Default
False. Note: this option is not supported whenmode="max". - mode (string_,_ optional) –
"sum","mean"or"max". Specifies the way to reduce the bag. Default:"mean" - sparse (bool, optional) – if
True, gradient w.r.t.weightmatrix will be a sparse tensor. See Notes for more details regarding sparse gradients. Note: this option is not supported whenmode="max".
| Variables: | weight (Tensor) – the learnable weights of the module of shape (num_embeddings x embedding_dim) initialized from  . . |
|---|
Inputs: input (LongTensor) and offsets (LongTensor, optional)
If
inputis 2D of shapeB x N,it will be treated as
Bbags (sequences) each of fixed lengthN, and this will returnBvalues aggregated in a way depending on themode.offsetsis ignored and required to beNonein this case.If
inputis 1D of shapeN,it will be treated as a concatenation of multiple bags (sequences).
offsetsis required to be a 1D tensor containing the starting index positions of each bag ininput. Therefore, foroffsetsof shapeB,inputwill be viewed as havingBbags. Empty bags (i.e., having 0-length) will have returned vectors filled by zeros.
Output shape: B x embedding_dim
Examples:
>>> # an Embedding module containing 10 tensors of size 3
>>> embedding_sum = nn.EmbeddingBag(10, 3, mode='sum')
>>> # a batch of 2 samples of 4 indices each
>>> input = torch.LongTensor([1,2,4,5,4,3,2,9])
>>> offsets = torch.LongTensor([0,4])
>>> embedding_sum(input, offsets)
tensor([[-0.8861, -5.4350, -0.0523],
[ 1.1306, -2.5798, -1.0044]])
Distance functions
CosineSimilarity
class torch.nn.CosineSimilarity(dim=1, eps=1e-08)
Returns cosine similarity between  and
and  , computed along dim.
, computed along dim.

Parameters:
- dim (int, optional) – Dimension where cosine similarity is computed. Default: 1
- eps (float, optional) – Small value to avoid division by zero. Default: 1e-8
Shape:
- Input1:
 where D is at position
where D is at position dim - Input2:
 , same shape as the Input1
, same shape as the Input1 - Output:

Examples:
>>> input1 = torch.randn(100, 128)
>>> input2 = torch.randn(100, 128)
>>> cos = nn.CosineSimilarity(dim=1, eps=1e-6)
>>> output = cos(input1, input2)
PairwiseDistance
class torch.nn.PairwiseDistance(p=2.0, eps=1e-06, keepdim=False)
Computes the batchwise pairwise distance between vectors  ,
,  using the p-norm:
using the p-norm:
Parameters:
- p (real) – the norm degree. Default: 2
- eps (float, optional) – Small value to avoid division by zero. Default: 1e-6
- keepdim (bool, optional) – Determines whether or not to keep the batch dimension. Default: False
Shape:
- Input1:
 where
where D = vector dimension - Input2:
 , same shape as the Input1
, same shape as the Input1 - Output:
 . If
. If keepdimisFalse, then .
.
Examples:
>>> pdist = nn.PairwiseDistance(p=2)
>>> input1 = torch.randn(100, 128)
>>> input2 = torch.randn(100, 128)
>>> output = pdist(input1, input2)
Loss functions
L1Loss
class torch.nn.L1Loss(size_average=None, reduce=None, reduction='mean')
Creates a criterion that measures the mean absolute error (MAE) between each element in the input x and target y.
The loss can be described as:

where  is the batch size. If reduce is
is the batch size. If reduce is True, then:

x and y are tensors of arbitrary shapes with a total of n elements each.
The sum operation still operates over all the elements, and divides by n.
The division by n can be avoided if one sets the constructor argument size_average=False.
Parameters:
- size_average (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged over each loss element in the batch. Note that for some losses, there multiple elements per sample. If the fieldsize_averageis set toFalse, the losses are instead summed for each minibatch. Ignored when reduce isFalse. Default:True - reduce (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged or summed over observations for each minibatch depending onsize_average. WhenreduceisFalse, returns a loss per batch element instead and ignoressize_average. Default:True - reduction (string_,_ optional) – Specifies the reduction to apply to the output: ‘none’ | ‘mean’ | ‘sum’. ‘none’: no reduction will be applied, ‘mean’: the sum of the output will be divided by the number of elements in the output, ‘sum’: the output will be summed. Note:
size_averageandreduceare in the process of being deprecated, and in the meantime, specifying either of those two args will overridereduction. Default: ‘mean’
Shape:
- Input:
 where
where *means, any number of additional dimensions - Target:
 , same shape as the input
, same shape as the input - Output: scalar. If reduce is
False, then , same shape as the input
, same shape as the input
Examples:
>>> loss = nn.L1Loss()
>>> input = torch.randn(3, 5, requires_grad=True)
>>> target = torch.randn(3, 5)
>>> output = loss(input, target)
>>> output.backward()
MSELoss
class torch.nn.MSELoss(size_average=None, reduce=None, reduction='mean')
Creates a criterion that measures the mean squared error (squared L2 norm) between each element in the input x and target y.
The loss can be described as:

where  is the batch size. If reduce is
is the batch size. If reduce is True, then:

The sum operation still operates over all the elements, and divides by n.
The division by n can be avoided if one sets size_average to False.
To get a batch of losses, a loss per batch element, set reduce to False. These losses are not averaged and are not affected by size_average.
Parameters:
- size_average (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged over each loss element in the batch. Note that for some losses, there multiple elements per sample. If the fieldsize_averageis set toFalse, the losses are instead summed for each minibatch. Ignored when reduce isFalse. Default:True - reduce (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged or summed over observations for each minibatch depending onsize_average. WhenreduceisFalse, returns a loss per batch element instead and ignoressize_average. Default:True - reduction (string_,_ optional) – Specifies the reduction to apply to the output: ‘none’ | ‘mean’ | ‘sum’. ‘none’: no reduction will be applied, ‘mean’: the sum of the output will be divided by the number of elements in the output, ‘sum’: the output will be summed. Note:
size_averageandreduceare in the process of being deprecated, and in the meantime, specifying either of those two args will overridereduction. Default: ‘mean’
Shape:
- Input:
 where
where *means, any number of additional dimensions - Target:
 , same shape as the input
, same shape as the input
Examples:
>>> loss = nn.MSELoss()
>>> input = torch.randn(3, 5, requires_grad=True)
>>> target = torch.randn(3, 5)
>>> output = loss(input, target)
>>> output.backward()
CrossEntropyLoss
class torch.nn.CrossEntropyLoss(weight=None, size_average=None, ignore_index=-100, reduce=None, reduction='mean')
This criterion combines nn.LogSoftmax() and nn.NLLLoss() in one single class.
It is useful when training a classification problem with C classes. If provided, the optional argument weight should be a 1D Tensor assigning weight to each of the classes. This is particularly useful when you have an unbalanced training set.
The input is expected to contain scores for each class.
input has to be a Tensor of size either  or
or  with
with  for the
for the K-dimensional case (described later).
This criterion expects a class index (0 to C-1) as the target for each value of a 1D tensor of size minibatch
The loss can be described as:

or in the case of the weight argument being specified:

The losses are averaged across observations for each minibatch.
Can also be used for higher dimension inputs, such as 2D images, by providing an input of size  with
with  , where
, where  is the number of dimensions, and a target of appropriate shape (see below).
is the number of dimensions, and a target of appropriate shape (see below).
Parameters:
- weight (Tensor, optional) – a manual rescaling weight given to each class. If given, has to be a Tensor of size
C - size_average (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged over each loss element in the batch. Note that for some losses, there multiple elements per sample. If the fieldsize_averageis set toFalse, the losses are instead summed for each minibatch. Ignored when reduce isFalse. Default:True - ignore_index (int, optional) – Specifies a target value that is ignored and does not contribute to the input gradient. When
size_averageisTrue, the loss is averaged over non-ignored targets. - reduce (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged or summed over observations for each minibatch depending onsize_average. WhenreduceisFalse, returns a loss per batch element instead and ignoressize_average. Default:True - reduction (string_,_ optional) – Specifies the reduction to apply to the output: ‘none’ | ‘mean’ | ‘sum’. ‘none’: no reduction will be applied, ‘mean’: the sum of the output will be divided by the number of elements in the output, ‘sum’: the output will be summed. Note:
size_averageandreduceare in the process of being deprecated, and in the meantime, specifying either of those two args will overridereduction. Default: ‘mean’
Shape:
Input: \((N, C)\) where C = number of classes, or with
with  in the case of
in the case of K-dimensional loss.Target: \((N)\) where each value is \(0 \leq \text{targets}[i] \leq C-1\), or with
with  in the case of K-dimensional loss.
in the case of K-dimensional loss.Output: scalar. If reduce is False, then the same sizeas the target:
 , or
, or  with
with  in the case of K-dimensional loss.
in the case of K-dimensional loss.
Examples:
>>> loss = nn.CrossEntropyLoss()
>>> input = torch.randn(3, 5, requires_grad=True)
>>> target = torch.empty(3, dtype=torch.long).random_(5)
>>> output = loss(input, target)
>>> output.backward()
CTCLoss
class torch.nn.CTCLoss(blank=0, reduction='mean')
The Connectionist Temporal Classification loss.
Parameters:
- blank (int, optional) – blank label. Default
 .
. - reduction (string_,_ optional) – Specifies the reduction to apply to the output: ‘none’ | ‘mean’ | ‘sum’. ‘none’: no reduction will be applied, ‘mean’: the output losses will be divided by the target lengths and then the mean over the batch is taken. Default: ‘mean’
Inputs:
log_probs: Tensor of size \((T, N, C)\) where C = number of characters in alphabet including blank,
T = input length, and N = batch size. The logarithmized probabilities of the outputs (e.g. obtained with torch.nn.functional.log_softmax()).
targets: Tensor of size \((N, S)\) or (sum(target_lengths)).
Targets (cannot be blank). In the second form, the targets are assumed to be concatenated.
input_lengths: Tuple or tensor of size \((N)\).
Lengths of the inputs (must each be  )
)
target_lengths: Tuple or tensor of size \((N)\).
Lengths of the targets
Example:
>>> ctc_loss = nn.CTCLoss()
>>> log_probs = torch.randn(50, 16, 20).log_softmax(2).detach().requires_grad_()
>>> targets = torch.randint(1, 20, (16, 30), dtype=torch.long)
>>> input_lengths = torch.full((16,), 50, dtype=torch.long)
>>> target_lengths = torch.randint(10,30,(16,), dtype=torch.long)
>>> loss = ctc_loss(log_probs, targets, input_lengths, target_lengths)
>>> loss.backward()
Reference:
A. Graves et al.: Connectionist Temporal Classification: Labelling Unsegmented Sequence Data with Recurrent Neural Networks: https://www.cs.toronto.edu/~graves/icml_2006.pdf
Note
In order to use CuDNN, the following must be satisfied: targets must be in concatenated format, all input_lengths must be T.  ,
, target_lengths  , the integer arguments must be of dtype
, the integer arguments must be of dtype torch.int32.
The regular implementation uses the (more common in PyTorch) torch.long dtype.
Note
In some circumstances when using the CUDA backend with CuDNN, this operator may select a nondeterministic algorithm to increase performance. If this is undesirable, you can try to make the operation deterministic (potentially at a performance cost) by setting torch.backends.cudnn.deterministic = True. Please see the notes on Reproducibility for background.
NLLLoss
class torch.nn.NLLLoss(weight=None, size_average=None, ignore_index=-100, reduce=None, reduction='mean')
The negative log likelihood loss. It is useful to train a classification problem with C classes.
If provided, the optional argument weight should be a 1D Tensor assigning weight to each of the classes. This is particularly useful when you have an unbalanced training set.
The input given through a forward call is expected to contain log-probabilities of each class. input has to be a Tensor of size either  or
or  with
with  for the
for the K-dimensional case (described later).
Obtaining log-probabilities in a neural network is easily achieved by adding a LogSoftmax layer in the last layer of your network. You may use CrossEntropyLoss instead, if you prefer not to add an extra layer.
The target that this loss expects is a class index (0 to C-1, where C = number of classes)
If reduce is False, the loss can be described as:

where  is the batch size. If
is the batch size. If reduce is True (default), then

Can also be used for higher dimension inputs, such as 2D images, by providing an input of size  with
with  , where
, where  is the number of dimensions, and a target of appropriate shape (see below). In the case of images, it computes NLL loss per-pixel.
is the number of dimensions, and a target of appropriate shape (see below). In the case of images, it computes NLL loss per-pixel.
Parameters:
- weight (Tensor, optional) – a manual rescaling weight given to each class. If given, it has to be a Tensor of size
C. Otherwise, it is treated as if having all ones. - size_average (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged over each loss element in the batch. Note that for some losses, there multiple elements per sample. If the fieldsize_averageis set toFalse, the losses are instead summed for each minibatch. Ignored when reduce isFalse. Default:True - ignore_index (int, optional) – Specifies a target value that is ignored and does not contribute to the input gradient. When
size_averageisTrue, the loss is averaged over non-ignored targets. - reduce (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged or summed over observations for each minibatch depending onsize_average. WhenreduceisFalse, returns a loss per batch element instead and ignoressize_average. Default:True - reduction (string_,_ optional) – Specifies the reduction to apply to the output: ‘none’ | ‘mean’ | ‘sum’. ‘none’: no reduction will be applied, ‘mean’: the sum of the output will be divided by the number of elements in the output, ‘sum’: the output will be summed. Note:
size_averageandreduceare in the process of being deprecated, and in the meantime, specifying either of those two args will overridereduction. Default: ‘mean’
Shape:
Input: \((N, C)\) where C = number of classes, or with
with  in the case of
in the case of K-dimensional loss.Target: \((N)\) where each value is \(0 \leq \text{targets}[i] \leq C-1\), or with
with  in the case of K-dimensional loss.
in the case of K-dimensional loss.Output: scalar. If reduce is False, then the same sizeas the target:
 , or
, or  with
with  in the case of K-dimensional loss.
in the case of K-dimensional loss.
Examples:
>>> m = nn.LogSoftmax()
>>> loss = nn.NLLLoss()
>>> # input is of size N x C = 3 x 5
>>> input = torch.randn(3, 5, requires_grad=True)
>>> # each element in target has to have 0 <= value < C
>>> target = torch.tensor([1, 0, 4])
>>> output = loss(m(input), target)
>>> output.backward()
>>>
>>>
>>> # 2D loss example (used, for example, with image inputs)
>>> N, C = 5, 4
>>> loss = nn.NLLLoss()
>>> # input is of size N x C x height x width
>>> data = torch.randn(N, 16, 10, 10)
>>> conv = nn.Conv2d(16, C, (3, 3))
>>> m = nn.LogSoftmax()
>>> # each element in target has to have 0 <= value < C
>>> target = torch.empty(N, 8, 8, dtype=torch.long).random_(0, C)
>>> output = loss(m(conv(data)), target)
>>> output.backward()
PoissonNLLLoss
class torch.nn.PoissonNLLLoss(log_input=True, full=False, size_average=None, eps=1e-08, reduce=None, reduction='mean')
Negative log likelihood loss with Poisson distribution of target.
The loss can be described as:

The last term can be omitted or approximated with Stirling formula. The approximation is used for target values more than 1. For targets less or equal to 1 zeros are added to the loss.
Parameters:
log_input (bool, optional) – if
Truethe loss is computed as , if
, if Falsethe loss is .
.full (bool, optional) –
whether to compute full loss, i. e. to add the Stirling approximation term

size_average (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged over each loss element in the batch. Note that for some losses, there multiple elements per sample. If the fieldsize_averageis set toFalse, the losses are instead summed for each minibatch. Ignored when reduce isFalse. Default:Trueeps (float, optional) – Small value to avoid evaluation of
 when
when log_input == False. Default: 1e-8reduce (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged or summed over observations for each minibatch depending onsize_average. WhenreduceisFalse, returns a loss per batch element instead and ignoressize_average. Default:Truereduction (string_,_ optional) – Specifies the reduction to apply to the output: ‘none’ | ‘mean’ | ‘sum’. ‘none’: no reduction will be applied, ‘mean’: the sum of the output will be divided by the number of elements in the output, ‘sum’: the output will be summed. Note:
size_averageandreduceare in the process of being deprecated, and in the meantime, specifying either of those two args will overridereduction. Default: ‘mean’
Examples:
>>> loss = nn.PoissonNLLLoss()
>>> log_input = torch.randn(5, 2, requires_grad=True)
>>> target = torch.randn(5, 2)
>>> output = loss(log_input, target)
>>> output.backward()
KLDivLoss
class torch.nn.KLDivLoss(size_average=None, reduce=None, reduction='mean')
The Kullback-Leibler divergence Loss
KL divergence is a useful distance measure for continuous distributions and is often useful when performing direct regression over the space of (discretely sampled) continuous output distributions.
As with NLLLoss, the input given is expected to contain log-probabilities. However, unlike NLLLoss, input is not restricted to a 2D Tensor. The targets are given as probabilities (i.e. without taking the logarithm).
This criterion expects a target Tensor of the same size as the input Tensor.
The unreduced (i.e. with reduce set to False) loss can be described as:

where the index  spans all dimensions of
spans all dimensions of input and  has the same shape as
has the same shape as input. If reduce is True (the default), then:

In default reduction mode ‘mean’, the losses are averaged for each minibatch over observations as well as over dimensions. ‘batchmean’ mode gives the correct KL divergence where losses are averaged over batch dimension only. ‘mean’ mode’s behavior will be changed to the same as ‘batchmean’ in the next major release.
Parameters:
- size_average (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged over each loss element in the batch. Note that for some losses, there multiple elements per sample. If the fieldsize_averageis set toFalse, the losses are instead summed for each minibatch. Ignored when reduce isFalse. Default:True - reduce (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged or summed over observations for each minibatch depending onsize_average. WhenreduceisFalse, returns a loss per batch element instead and ignoressize_average. Default:True - reduction (string_,_ optional) – Specifies the reduction to apply to the output: ‘none’ | ‘batchmean’ | ‘sum’ | ‘mean’. ‘none’: no reduction will be applied. ‘batchmean’: the sum of the output will be divided by batchsize. ‘sum’: the output will be summed. ‘mean’: the output will be divided by the number of elements in the output. Default: ‘mean’
:param .. note:: size_average and reduce are in the process of being deprecated,: and in the meantime, specifying either of those two args will override reduction. :param .. note:: reduction=’mean’ doesn’t return the true kl divergence value, please use: reduction=’batchmean’ which aligns with KL math definition.
In the next major release, ‘mean’ will be changed to be the same as ‘batchmean’.
Shape:
input:
 where
where *means, any number of additional dimensionstarget:
 , same shape as the input
, same shape as the inputoutput: scalar by default. If reduce is False, then \((N, *)\),the same shape as the input
BCELoss
class torch.nn.BCELoss(weight=None, size_average=None, reduce=None, reduction='mean')
Creates a criterion that measures the Binary Cross Entropy between the target and the output:
The loss can be described as:

where  is the batch size. If reduce is
is the batch size. If reduce is True, then

This is used for measuring the error of a reconstruction in for example an auto-encoder. Note that the targets y should be numbers between 0 and 1.
Parameters:
- weight (Tensor, optional) – a manual rescaling weight given to the loss of each batch element. If given, has to be a Tensor of size “nbatch”.
- size_average (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged over each loss element in the batch. Note that for some losses, there multiple elements per sample. If the fieldsize_averageis set toFalse, the losses are instead summed for each minibatch. Ignored when reduce isFalse. Default:True - reduce (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged or summed over observations for each minibatch depending onsize_average. WhenreduceisFalse, returns a loss per batch element instead and ignoressize_average. Default:True - reduction (string_,_ optional) – Specifies the reduction to apply to the output: ‘none’ | ‘mean’ | ‘sum’. ‘none’: no reduction will be applied, ‘mean’: the sum of the output will be divided by the number of elements in the output, ‘sum’: the output will be summed. Note:
size_averageandreduceare in the process of being deprecated, and in the meantime, specifying either of those two args will overridereduction. Default: ‘mean’
Shape:
- Input:
 where
where *means, any number of additional dimensions - Target:
 , same shape as the input
, same shape as the input - Output: scalar. If
reduceis False, then(N, *), same shape as input.
Examples:
>>> m = nn.Sigmoid()
>>> loss = nn.BCELoss()
>>> input = torch.randn(3, requires_grad=True)
>>> target = torch.empty(3).random_(2)
>>> output = loss(m(input), target)
>>> output.backward()
BCEWithLogitsLoss
class torch.nn.BCEWithLogitsLoss(weight=None, size_average=None, reduce=None, reduction='mean', pos_weight=None)
This loss combines a Sigmoid layer and the BCELoss in one single class. This version is more numerically stable than using a plain Sigmoid followed by a BCELoss as, by combining the operations into one layer, we take advantage of the log-sum-exp trick for numerical stability.
The loss can be described as:

where  is the batch size. If reduce is
is the batch size. If reduce is True, then

This is used for measuring the error of a reconstruction in for example an auto-encoder. Note that the targets t[i] should be numbers between 0 and 1.
It’s possible to trade off recall and precision by adding weights to positive examples. In this case the loss can be described as:

where  is the positive weight of class
is the positive weight of class  .
.  increases the recall,
increases the recall,  increases the precision.
increases the precision.
For example, if a dataset contains 100 positive and 300 negative examples of a single class, then pos_weight for the class should be equal to  . The loss would act as if the dataset contains
. The loss would act as if the dataset contains  positive examples.
positive examples.
Parameters:
- weight (Tensor, optional) – a manual rescaling weight given to the loss of each batch element. If given, has to be a Tensor of size “nbatch”.
- size_average (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged over each loss element in the batch. Note that for some losses, there multiple elements per sample. If the fieldsize_averageis set toFalse, the losses are instead summed for each minibatch. Ignored when reduce isFalse. Default:True - reduce (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged or summed over observations for each minibatch depending onsize_average. WhenreduceisFalse, returns a loss per batch element instead and ignoressize_average. Default:True - reduction (string_,_ optional) – Specifies the reduction to apply to the output: ‘none’ | ‘mean’ | ‘sum’. ‘none’: no reduction will be applied, ‘mean’: the sum of the output will be divided by the number of elements in the output, ‘sum’: the output will be summed. Note:
size_averageandreduceare in the process of being deprecated, and in the meantime, specifying either of those two args will overridereduction. Default: ‘mean’ - pos_weight – a weight of positive examples. Must be a vector with length equal to the number of classes.
MarginRankingLoss
class torch.nn.MarginRankingLoss(margin=0.0, size_average=None, reduce=None, reduction='mean')
Creates a criterion that measures the loss given inputs x1, x2, two 1D mini-batch Tensors, and a label 1D mini-batch tensor y with VALUES (NULL, and vice-versa for y == -1.
The loss function for each sample in the mini-batch is:

Parameters:
- margin (float, optional) – Has a default value of
0. - size_average (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged over each loss element in the batch. Note that for some losses, there multiple elements per sample. If the fieldsize_averageis set toFalse, the losses are instead summed for each minibatch. Ignored when reduce isFalse. Default:True - reduce (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged or summed over observations for each minibatch depending onsize_average. WhenreduceisFalse, returns a loss per batch element instead and ignoressize_average. Default:True - reduction (string_,_ optional) – Specifies the reduction to apply to the output: ‘none’ | ‘mean’ | ‘sum’. ‘none’: no reduction will be applied, ‘mean’: the sum of the output will be divided by the number of elements in the output, ‘sum’: the output will be summed. Note:
size_averageandreduceare in the process of being deprecated, and in the meantime, specifying either of those two args will overridereduction. Default: ‘mean’
Shape:
- Input:
 where
where Nis the batch size andDis the size of a sample. - Target:

- Output: scalar. If
reduceis False, then(N).
HingeEmbeddingLoss
class torch.nn.HingeEmbeddingLoss(margin=1.0, size_average=None, reduce=None, reduction='mean')
Measures the loss given an input tensor x and a labels tensor y containing VALUES (NULL, e.g. using the L1 pairwise distance as x, and is typically used for learning nonlinear embeddings or semi-supervised learning.
The loss function for  -th sample in the mini-batch is
-th sample in the mini-batch is

and the total loss functions is

where  .
.
Parameters:
- margin (float, optional) – Has a default value of
1. - size_average (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged over each loss element in the batch. Note that for some losses, there multiple elements per sample. If the fieldsize_averageis set toFalse, the losses are instead summed for each minibatch. Ignored when reduce isFalse. Default:True - reduce (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged or summed over observations for each minibatch depending onsize_average. WhenreduceisFalse, returns a loss per batch element instead and ignoressize_average. Default:True - reduction (string_,_ optional) – Specifies the reduction to apply to the output: ‘none’ | ‘mean’ | ‘sum’. ‘none’: no reduction will be applied, ‘mean’: the sum of the output will be divided by the number of elements in the output, ‘sum’: the output will be summed. Note:
size_averageandreduceare in the process of being deprecated, and in the meantime, specifying either of those two args will overridereduction. Default: ‘mean’
Shape:
- Input: Tensor of arbitrary shape. The sum operation operates over all the elements.
- Target: Same shape as input.
- Output: scalar. If reduce is
False, then same shape as the input
MultiLabelMarginLoss
class torch.nn.MultiLabelMarginLoss(size_average=None, reduce=None, reduction='mean')
Creates a criterion that optimizes a multi-class multi-classification hinge loss (margin-based loss) between input x (a 2D mini-batch Tensor) and output y (which is a 2D Tensor of target class indices). For each sample in the mini-batch:

where  to
to  ,
,  to
to  ,
,  , and
, and  for all
for all  and
and  .
.
y and x must have the same size.
The criterion only considers a contiguous block of non-negative targets that starts at the front.
This allows for different samples to have variable amounts of target classes
Parameters:
- size_average (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged over each loss element in the batch. Note that for some losses, there multiple elements per sample. If the fieldsize_averageis set toFalse, the losses are instead summed for each minibatch. Ignored when reduce isFalse. Default:True - reduce (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged or summed over observations for each minibatch depending onsize_average. WhenreduceisFalse, returns a loss per batch element instead and ignoressize_average. Default:True - reduction (string_,_ optional) – Specifies the reduction to apply to the output: ‘none’ | ‘mean’ | ‘sum’. ‘none’: no reduction will be applied, ‘mean’: the sum of the output will be divided by the number of elements in the output, ‘sum’: the output will be summed. Note:
size_averageandreduceare in the process of being deprecated, and in the meantime, specifying either of those two args will overridereduction. Default: ‘mean’
Shape:
- Input:
 or
or  where
where Nis the batch size andCis the number of classes. - Target:
 or
or  , same shape as the input.
, same shape as the input. - Output: scalar. If
reduceis False, then(N).
SmoothL1Loss
class torch.nn.SmoothL1Loss(size_average=None, reduce=None, reduction='mean')
Creates a criterion that uses a squared term if the absolute element-wise error falls below 1 and an L1 term otherwise. It is less sensitive to outliers than the MSELoss and in some cases prevents exploding gradients (e.g. see “Fast R-CNN” paper by Ross Girshick). Also known as the Huber loss:
where  is given by:
is given by:

x and y arbitrary shapes with a total of n elements each the sum operation still operates over all the elements, and divides by n.
The division by n can be avoided if one sets size_average to False
Parameters:
- size_average (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged over each loss element in the batch. Note that for some losses, there multiple elements per sample. If the fieldsize_averageis set toFalse, the losses are instead summed for each minibatch. Ignored when reduce isFalse. Default:True - reduce (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged or summed over observations for each minibatch depending onsize_average. WhenreduceisFalse, returns a loss per batch element instead and ignoressize_average. Default:True - reduction (string_,_ optional) – Specifies the reduction to apply to the output: ‘none’ | ‘mean’ | ‘sum’. ‘none’: no reduction will be applied, ‘mean’: the sum of the output will be divided by the number of elements in the output, ‘sum’: the output will be summed. Note:
size_averageandreduceare in the process of being deprecated, and in the meantime, specifying either of those two args will overridereduction. Default: ‘mean’
Shape:
- Input:
 where
where *means, any number of additional dimensions - Target:
 , same shape as the input
, same shape as the input - Output: scalar. If reduce is
False, then , same shape as the input
, same shape as the input
SoftMarginLoss
class torch.nn.SoftMarginLoss(size_average=None, reduce=None, reduction='mean')
Creates a criterion that optimizes a two-class classification logistic loss between input tensor x and target tensor y (containing 1 or -1).

Parameters:
- size_average (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged over each loss element in the batch. Note that for some losses, there multiple elements per sample. If the fieldsize_averageis set toFalse, the losses are instead summed for each minibatch. Ignored when reduce isFalse. Default:True - reduce (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged or summed over observations for each minibatch depending onsize_average. WhenreduceisFalse, returns a loss per batch element instead and ignoressize_average. Default:True - reduction (string_,_ optional) – Specifies the reduction to apply to the output: ‘none’ | ‘mean’ | ‘sum’. ‘none’: no reduction will be applied, ‘mean’: the sum of the output will be divided by the number of elements in the output, ‘sum’: the output will be summed. Note:
size_averageandreduceare in the process of being deprecated, and in the meantime, specifying either of those two args will overridereduction. Default: ‘mean’
Shape:
- Input: Tensor of arbitrary shape.
- Target: Same shape as input.
- Output: scalar. If reduce is
False, then same shape as the input
MultiLabelSoftMarginLoss
class torch.nn.MultiLabelSoftMarginLoss(weight=None, size_average=None, reduce=None, reduction='mean')
Creates a criterion that optimizes a multi-label one-versus-all loss based on max-entropy, between input x and target y of size (N, C). For each sample in the minibatch:

where i == 0 to x.nElement()-1, y[i] in {0,1}.
Parameters:
- weight (Tensor, optional) – a manual rescaling weight given to each class. If given, it has to be a Tensor of size
C. Otherwise, it is treated as if having all ones. - size_average (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged over each loss element in the batch. Note that for some losses, there multiple elements per sample. If the fieldsize_averageis set toFalse, the losses are instead summed for each minibatch. Ignored when reduce isFalse. Default:True - reduce (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged or summed over observations for each minibatch depending onsize_average. WhenreduceisFalse, returns a loss per batch element instead and ignoressize_average. Default:True - reduction (string_,_ optional) – Specifies the reduction to apply to the output: ‘none’ | ‘mean’ | ‘sum’. ‘none’: no reduction will be applied, ‘mean’: the sum of the output will be divided by the number of elements in the output, ‘sum’: the output will be summed. Note:
size_averageandreduceare in the process of being deprecated, and in the meantime, specifying either of those two args will overridereduction. Default: ‘mean’
Shape:
- Input:
 where
where Nis the batch size andCis the number of classes. - Target:
 , same shape as the input.
, same shape as the input. - Output: scalar. If
reduceis False, then(N).
CosineEmbeddingLoss
class torch.nn.CosineEmbeddingLoss(margin=0.0, size_average=None, reduce=None, reduction='mean')
Creates a criterion that measures the loss given input tensors  ,
,  and a
and a Tensor label y with values 1 or -1. This is used for measuring whether two inputs are similar or dissimilar, using the cosine distance, and is typically used for learning nonlinear embeddings or semi-supervised learning.
The loss function for each sample is:

Parameters:
- margin (float, optional) – Should be a number from
-1to1,0to0.5is suggested. Ifmarginis missing, the default value is0. - size_average (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged over each loss element in the batch. Note that for some losses, there multiple elements per sample. If the fieldsize_averageis set toFalse, the losses are instead summed for each minibatch. Ignored when reduce isFalse. Default:True - reduce (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged or summed over observations for each minibatch depending onsize_average. WhenreduceisFalse, returns a loss per batch element instead and ignoressize_average. Default:True - reduction (string_,_ optional) – Specifies the reduction to apply to the output: ‘none’ | ‘mean’ | ‘sum’. ‘none’: no reduction will be applied, ‘mean’: the sum of the output will be divided by the number of elements in the output, ‘sum’: the output will be summed. Note:
size_averageandreduceare in the process of being deprecated, and in the meantime, specifying either of those two args will overridereduction. Default: ‘mean’
MultiMarginLoss
class torch.nn.MultiMarginLoss(p=1, margin=1.0, weight=None, size_average=None, reduce=None, reduction='mean')
Creates a criterion that optimizes a multi-class classification hinge loss (margin-based loss) between input x (a 2D mini-batch Tensor) and output y (which is a 1D tensor of target class indices,  ):
):
For each mini-batch sample, the loss in terms of the 1D input x and scalar output y is:

where i == 0 to x.size(0) and  .
.
Optionally, you can give non-equal weighting on the classes by passing a 1D weight tensor into the constructor.
The loss function then becomes:

Parameters:
- p (int, optional) – Has a default value of
1.1and2are the only supported values - margin (float, optional) – Has a default value of
1. - weight (Tensor, optional) – a manual rescaling weight given to each class. If given, it has to be a Tensor of size
C. Otherwise, it is treated as if having all ones. - size_average (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged over each loss element in the batch. Note that for some losses, there multiple elements per sample. If the fieldsize_averageis set toFalse, the losses are instead summed for each minibatch. Ignored when reduce isFalse. Default:True - reduce (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged or summed over observations for each minibatch depending onsize_average. WhenreduceisFalse, returns a loss per batch element instead and ignoressize_average. Default:True - reduction (string_,_ optional) – Specifies the reduction to apply to the output: ‘none’ | ‘mean’ | ‘sum’. ‘none’: no reduction will be applied, ‘mean’: the sum of the output will be divided by the number of elements in the output, ‘sum’: the output will be summed. Note:
size_averageandreduceare in the process of being deprecated, and in the meantime, specifying either of those two args will overridereduction. Default: ‘mean’
TripletMarginLoss
class torch.nn.TripletMarginLoss(margin=1.0, p=2.0, eps=1e-06, swap=False, size_average=None, reduce=None, reduction='mean')
Creates a criterion that measures the triplet loss given an input tensors x1, x2, x3 and a margin with a value greater than 0. This is used for measuring a relative similarity between samples. A triplet is composed by a, p and n: anchor, positive examples and negative example respectively. The shapes of all input tensors should be  .
.
The distance swap is described in detail in the paper Learning shallow convolutional feature descriptors with triplet losses by V. Balntas, E. Riba et al.
The loss function for each sample in the mini-batch is:

where

Parameters:
- margin (float, optional) – Default:
1. - p (int, optional) – The norm degree for pairwise distance. Default:
2. - swap (float, optional) – The distance swap is described in detail in the paper
Learning shallow convolutional feature descriptors with triplet lossesby V. Balntas, E. Riba et al. Default:False. - size_average (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged over each loss element in the batch. Note that for some losses, there multiple elements per sample. If the fieldsize_averageis set toFalse, the losses are instead summed for each minibatch. Ignored when reduce isFalse. Default:True - reduce (bool, optional) – Deprecated (see
reduction). By default, the losses are averaged or summed over observations for each minibatch depending onsize_average. WhenreduceisFalse, returns a loss per batch element instead and ignoressize_average. Default:True - reduction (string_,_ optional) – Specifies the reduction to apply to the output: ‘none’ | ‘mean’ | ‘sum’. ‘none’: no reduction will be applied, ‘mean’: the sum of the output will be divided by the number of elements in the output, ‘sum’: the output will be summed. Note:
size_averageandreduceare in the process of being deprecated, and in the meantime, specifying either of those two args will overridereduction. Default: ‘mean’
Shape:
- Input:
 where
where Dis the vector dimension. - Output: scalar. If
reduceis False, then(N).
>>> triplet_loss = nn.TripletMarginLoss(margin=1.0, p=2)
>>> input1 = torch.randn(100, 128, requires_grad=True)
>>> input2 = torch.randn(100, 128, requires_grad=True)
>>> input3 = torch.randn(100, 128, requires_grad=True)
>>> output = triplet_loss(input1, input2, input3)
>>> output.backward()
Vision layers
PixelShuffle
class torch.nn.PixelShuffle(upscale_factor)
Rearranges elements in a tensor of shape  to a tensor of shape
to a tensor of shape  .
.
This is useful for implementing efficient sub-pixel convolution with a stride of  .
.
Look at the paper: Real-Time Single Image and Video Super-Resolution Using an Efficient Sub-Pixel Convolutional Neural Network by Shi et. al (2016) for more details.
| Parameters: | upscale_factor (int) – factor to increase spatial resolution by |
|---|
Shape:
- Output:

Examples:
>>> pixel_shuffle = nn.PixelShuffle(3)
>>> input = torch.randn(1, 9, 4, 4)
>>> output = pixel_shuffle(input)
>>> print(output.size())
torch.Size([1, 1, 12, 12])
Upsample
class torch.nn.Upsample(size=None, scale_factor=None, mode='nearest', align_corners=None)
Upsamples a given multi-channel 1D (temporal), 2D (spatial) or 3D (volumetric) data.
The input data is assumed to be of the form minibatch x channels x [optional depth] x [optional height] x width. Hence, for spatial inputs, we expect a 4D Tensor and for volumetric inputs, we expect a 5D Tensor.
The algorithms available for upsampling are nearest neighbor and linear, bilinear and trilinear for 3D, 4D and 5D input Tensor, respectively.
One can either give a scale_factor or the target output size to calculate the output size. (You cannot give both, as it is ambiguous)
Parameters:
- size (tuple, optional) – a tuple of ints
([optional D_out], [optional H_out], W_out)output sizes - scale_factor (int / tuple of python:ints_,_ optional) – the multiplier for the image height / width / depth
- mode (string_,_ optional) – the upsampling algorithm: one of
nearest,linear,bilinearandtrilinear. Default:nearest - align_corners (bool, optional) – if True, the corner pixels of the input and output tensors are aligned, and thus preserving the values at those pixels. This only has effect when
modeislinear,bilinear, ortrilinear. Default: False
Shape:
- Input:
 ,
,  or
or 
- Output:
 ,
,  or
or  , where
, where



Warning
With align_corners = True, the linearly interpolating modes (linear, bilinear, and trilinear) don’t proportionally align the output and input pixels, and thus the output values can depend on the input size. This was the default behavior for these modes up to version 0.3.1. Since then, the default behavior is align_corners = False. See below for concrete examples on how this affects the outputs.
Note
If you want downsampling/general resizing, you should use interpolate().
Examples:
>>> input = torch.arange(1, 5).view(1, 1, 2, 2).float()
>>> input
tensor([[[[ 1., 2.],
[ 3., 4.]]]])
>>> m = nn.Upsample(scale_factor=2, mode='nearest')
>>> m(input)
tensor([[[[ 1., 1., 2., 2.],
[ 1., 1., 2., 2.],
[ 3., 3., 4., 4.],
[ 3., 3., 4., 4.]]]])
>>> m = nn.Upsample(scale_factor=2, mode='bilinear') # align_corners=False
>>> m(input)
tensor([[[[ 1.0000, 1.2500, 1.7500, 2.0000],
[ 1.5000, 1.7500, 2.2500, 2.5000],
[ 2.5000, 2.7500, 3.2500, 3.5000],
[ 3.0000, 3.2500, 3.7500, 4.0000]]]])
>>> m = nn.Upsample(scale_factor=2, mode='bilinear', align_corners=True)
>>> m(input)
tensor([[[[ 1.0000, 1.3333, 1.6667, 2.0000],
[ 1.6667, 2.0000, 2.3333, 2.6667],
[ 2.3333, 2.6667, 3.0000, 3.3333],
[ 3.0000, 3.3333, 3.6667, 4.0000]]]])
>>> # Try scaling the same data in a larger tensor
>>>
>>> input_3x3 = torch.zeros(3, 3).view(1, 1, 3, 3)
>>> input_3x3[:, :, :2, :2].copy_(input)
tensor([[[[ 1., 2.],
[ 3., 4.]]]])
>>> input_3x3
tensor([[[[ 1., 2., 0.],
[ 3., 4., 0.],
[ 0., 0., 0.]]]])
>>> m = nn.Upsample(scale_factor=2, mode='bilinear') # align_corners=False
>>> # Notice that values in top left corner are the same with the small input (except at boundary)
>>> m(input_3x3)
tensor([[[[ 1.0000, 1.2500, 1.7500, 1.5000, 0.5000, 0.0000],
[ 1.5000, 1.7500, 2.2500, 1.8750, 0.6250, 0.0000],
[ 2.5000, 2.7500, 3.2500, 2.6250, 0.8750, 0.0000],
[ 2.2500, 2.4375, 2.8125, 2.2500, 0.7500, 0.0000],
[ 0.7500, 0.8125, 0.9375, 0.7500, 0.2500, 0.0000],
[ 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000]]]])
>>> m = nn.Upsample(scale_factor=2, mode='bilinear', align_corners=True)
>>> # Notice that values in top left corner are now changed
>>> m(input_3x3)
tensor([[[[ 1.0000, 1.4000, 1.8000, 1.6000, 0.8000, 0.0000],
[ 1.8000, 2.2000, 2.6000, 2.2400, 1.1200, 0.0000],
[ 2.6000, 3.0000, 3.4000, 2.8800, 1.4400, 0.0000],
[ 2.4000, 2.7200, 3.0400, 2.5600, 1.2800, 0.0000],
[ 1.2000, 1.3600, 1.5200, 1.2800, 0.6400, 0.0000],
[ 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000]]]])
UpsamplingNearest2d
class torch.nn.UpsamplingNearest2d(size=None, scale_factor=None)
Applies a 2D nearest neighbor upsampling to an input signal composed of several input channels.
To specify the scale, it takes either the size or the scale_factor as it’s constructor argument.
When size is given, it is the output size of the image (h, w).
Parameters:
- size (tuple, optional) – a tuple of ints
(H_out, W_out)output sizes - scale_factor (int, optional) – the multiplier for the image height or width
Warning
This class is deprecated in favor of interpolate().
Shape:
- Input:

- Output:
 where
where


Examples:
>>> input = torch.arange(1, 5).view(1, 1, 2, 2)
>>> input
tensor([[[[ 1., 2.],
[ 3., 4.]]]])
>>> m = nn.UpsamplingNearest2d(scale_factor=2)
>>> m(input)
tensor([[[[ 1., 1., 2., 2.],
[ 1., 1., 2., 2.],
[ 3., 3., 4., 4.],
[ 3., 3., 4., 4.]]]])
UpsamplingBilinear2d
class torch.nn.UpsamplingBilinear2d(size=None, scale_factor=None)
Applies a 2D bilinear upsampling to an input signal composed of several input channels.
To specify the scale, it takes either the size or the scale_factor as it’s constructor argument.
When size is given, it is the output size of the image (h, w).
Parameters:
- size (tuple, optional) – a tuple of ints
(H_out, W_out)output sizes - scale_factor (int, optional) – the multiplier for the image height or width
Warning
This class is deprecated in favor of interpolate(). It is equivalent to nn.functional.interpolate(..., mode='bilinear', align_corners=True).
Shape:
- Input:

- Output:
 where
where


Examples:
>>> input = torch.arange(1, 5).view(1, 1, 2, 2)
>>> input
tensor([[[[ 1., 2.],
[ 3., 4.]]]])
>>> m = nn.UpsamplingBilinear2d(scale_factor=2)
>>> m(input)
tensor([[[[ 1.0000, 1.3333, 1.6667, 2.0000],
[ 1.6667, 2.0000, 2.3333, 2.6667],
[ 2.3333, 2.6667, 3.0000, 3.3333],
[ 3.0000, 3.3333, 3.6667, 4.0000]]]])
DataParallel layers (multi-GPU, distributed)
DataParallel
class torch.nn.DataParallel(module, device_ids=None, output_device=None, dim=0)
Implements data parallelism at the module level.
This container parallelizes the application of the given module by splitting the input across the specified devices by chunking in the batch dimension (other objects will be copied once per device). In the forward pass, the module is replicated on each device, and each replica handles a portion of the input. During the backwards pass, gradients from each replica are summed into the original module.
The batch size should be larger than the number of GPUs used.
See also: Use nn.DataParallel instead of multiprocessing
Arbitrary positional and keyword inputs are allowed to be passed into DataParallel EXCEPT Tensors. All tensors will be scattered on dim specified (default 0). Primitive types will be broadcasted, but all other types will be a shallow copy and can be corrupted if written to in the model’s forward pass.
The parallelized module must have its parameters and buffers on device_ids[0] before running this DataParallel module.
Warning
In each forward, module is replicated on each device, so any updates to the runing module in forward will be lost. For example, if module has a counter attribute that is incremented in each forward, it will always stay at the initial value becasue the update is done on the replicas which are destroyed after forward. However, DataParallel guarantees that the replica on device[0] will have its parameters and buffers sharing storage with the base parallelized module. So in-place updates to the parameters or buffers on device[0] will be recorded. E.g., BatchNorm2d and spectral_norm() rely on this behavior to update the buffers.
Warning
Forward and backward hooks defined on module and its submodules will be invoked len(device_ids) times, each with inputs located on a particular device. Particularly, the hooks are only guaranteed to be executed in correct order with respect to operations on corresponding devices. For example, it is not guaranteed that hooks set via register_forward_pre_hook() be executed before all len(device_ids) forward() calls, but that each such hook be executed before the corresponding forward() call of that device.
Warning
When module returns a scalar (i.e., 0-dimensional tensor) in forward(), this wrapper will return a vector of length equal to number of devices used in data parallelism, containing the result from each device.
Note
There is a subtlety in using the pack sequence -> recurrent network -> unpack sequence pattern in a Module wrapped in DataParallel. See My recurrent network doesn’t work with data parallelism section in FAQ for details.
Parameters:
- module (Module) – module to be parallelized
- device_ids (list of python:int or torch.device) – CUDA devices (default: all devices)
- output_device (int or torch.device) – device location of output (default: device_ids[0])
| Variables: | module (Module) – the module to be parallelized |
|---|
Example:
>>> net = torch.nn.DataParallel(model, device_ids=[0, 1, 2])
>>> output = net(input_var)
DistributedDataParallel
class torch.nn.parallel.DistributedDataParallel(module, device_ids=None, output_device=None, dim=0, broadcast_buffers=True, process_group=None, bucket_cap_mb=25, check_reduction=False)
Implements distributed data parallelism that is based on torch.distributed package at the module level.
This container parallelizes the application of the given module by splitting the input across the specified devices by chunking in the batch dimension. The module is replicated on each machine and each device, and each such replica handles a portion of the input. During the backwards pass, gradients from each node are averaged.
The batch size should be larger than the number of GPUs used locally. It should also be an integer multiple of the number of GPUs so that each chunk is the same size (so that each GPU processes the same number of samples).
See also: Basics and Use nn.DataParallel instead of multiprocessing. The same constraints on input as in torch.nn.DataParallel apply.
Creation of this class requires that torch.distributed to be already initialized, by calling torch.distributed.init_process_group()
DistributedDataParallel can be used in the following two ways:
- Single-Process Multi-GPU
In this case, a single process will be spawned on each host/node and each process will operate on all the GPUs of the node where it’s running. To use DistributedDataParallel in this way, you can simply construct the model as the following:
>>> torch.distributed.init_process_group(backend="nccl")
>>> model = DistributedDataParallel(model) # device_ids will include all GPU devices be default
- Multi-Process Single-GPU
This is the highly recommended way to use DistributedDataParallel, with multiple processes, each of which operates on a single GPU. This is currently the fastest approach to do data parallel training using PyTorch and applies to both single-node(multi-GPU) and multi-node data parallel training. It is proven to be significantly faster than torch.nn.DataParallel for single-node multi-GPU data parallel training.
Here is how to use it: on each host with N GPUs, you should spawn up N processes, while ensuring that each process invidually works on a single GPU from 0 to N-1. Therefore, it is your job to ensure that your training script operates on a single given GPU by calling:
>>> torch.cuda.set_device(i)
where i is from 0 to N-1. In each process, you should refer the following to construct this module:
>>> torch.distributed.init_process_group(backend='nccl', world_size=4, init_method='...')
>>> model = DistributedDataParallel(model, device_ids=[i], output_device=i)
In order to spawn up multiple processes per node, you can use either torch.distributed.launch or torch.multiprocessing.spawn
Note
nccl backend is currently the fastest and highly recommended backend to be used with Multi-Process Single-GPU distributed training and this applies to both single-node and multi-node distributed training
Warning
This module works only with the gloo and nccl backends.
Warning
Constructor, forward method, and differentiation of the output (or a function of the output of this module) is a distributed synchronization point. Take that into account in case different processes might be executing different code.
Warning
This module assumes all parameters are registered in the model by the time it is created. No parameters should be added nor removed later. Same applies to buffers.
Warning
This module assumes all parameters are registered in the model of each distributed processes are in the same order. The module itself will conduct gradient all-reduction following the reverse order of the registered parameters of the model. In other wise, it is users’ responsibility to ensure that each distributed process has the exact same model and thus the exact parameter registeration order.
Warning
This module assumes all buffers and gradients are dense.
Warning
This module doesn’t work with torch.autograd.grad() (i.e. it will only work if gradients are to be accumulated in .grad attributes of parameters).
Warning
If you plan on using this module with a nccl backend or a gloo backend (that uses Infiniband), together with a DataLoader that uses multiple workers, please change the multiprocessing start method to forkserver (Python 3 only) or spawn. Unfortunately Gloo (that uses Infiniband) and NCCL2 are not fork safe, and you will likely experience deadlocks if you don’t change this setting.
Warning
Forward and backward hooks defined on module and its submodules won’t be invoked anymore, unless the hooks are initialized in the forward() method.
Warning
You should never try to change your model’s parameters after wrapping up your model with DistributedDataParallel. In other words, when wrapping up your model with DistributedDataParallel, the constructor of DistributedDataParallel will register the additional gradient reduction functions on all the parameters of the model itself at the time of construction. If you change the model’s parameters after the DistributedDataParallel construction, this is not supported and unexpected behaviors can happen, since some parameters’ gradient reduction functions might not get called.
Note
Parameters are never broadcast between processes. The module performs an all-reduce step on gradients and assumes that they will be modified by the optimizer in all processes in the same way. Buffers (e.g. BatchNorm stats) are broadcast from the module in process of rank 0, to all other replicas in the system in every iteration.
Parameters:
- module (Module) – module to be parallelized
- device_ids (list of python:int or torch.device) – CUDA devices (default: all devices)
- output_device (int or torch.device) – device location of output (default: device_ids[0])
- broadcast_buffers (bool) – flag that enables syncing (broadcasting) buffers of the module at beginning of the forward function. (default: True)
- process_group – the process group to be used for distributed data all-reduction. If None, the default process group, which is created by
torch.distributed.init_process_group, will be used. (default: None) - bucket_cap_mb – DistributedDataParallel will bucket parameters into multiple buckets so that gradient reduction of each bucket can potentially overlap with backward computation. bucket_cap_mb controls the bucket size in MegaBytes (MB) (default: 25)
- check_reduction – when setting to True, it enables DistributedDataParallel to automatically check if the previous iteration’s backward reductions were successfully issued at the beginning of every iteration’s forward function. You normally don’t need this option enabled unless you are observing weird behaviors such as different ranks are getting different gradients, which should not happen if DistributedDataParallel is corrected used. (default: False)
| Variables: | module (Module) – the module to be parallelized |
|---|
Example::
>>> torch.distributed.init_process_group(backend='nccl', world_size=4, init_method='...')
>>> net = torch.nn.DistributedDataParallel(model, pg)
DistributedDataParallelCPU
class torch.nn.parallel.DistributedDataParallelCPU(module)
Implements distributed data parallelism for CPU at the module level.
This module supports the mpi and gloo backends.
This container parallelizes the application of the given module by splitting the input across the specified devices by chunking in the batch dimension. The module is replicated on each machine, and each such replica handles a portion of the input. During the backwards pass, gradients from each node are averaged.
This module could be used in conjunction with the DistributedSampler, (see :class torch.utils.data.distributed.DistributedSampler) which will load a subset of the original datset for each node with the same batch size. So strong scaling should be configured like this:
n = 1, batch size = 12
n = 2, batch size = 64
n = 4, batch size = 32
n = 8, batch size = 16
Creation of this class requires the distributed package to be already initialized in the process group mode (see torch.distributed.init_process_group()).
Warning
Constructor, forward method, and differentiation of the output (or a function of the output of this module) is a distributed synchronization point. Take that into account in case different node might be executing different code.
Warning
This module assumes all parameters are registered in the model by the time it is created. No parameters should be added nor removed later.
Warning
This module assumes all gradients are dense.
Warning
This module doesn’t work with torch.autograd.grad() (i.e. it will only work if gradients are to be accumulated in .grad attributes of parameters).
Warning
Forward and backward hooks defined on module and its submodules won’t be invoked anymore, unless the hooks are initialized in the forward() method.
Note
Parameters are broadcast between nodes in the init() function. The module performs an all-reduce step on gradients and assumes that they will be modified by the optimizer in all nodes in the same way.
| Parameters: | module – module to be parallelized |
|---|
Example:
>>> torch.distributed.init_process_group(world_size=4, init_method='...')
>>> net = torch.nn.DistributedDataParallelCPU(model)
Utilities
clip_grad_norm_
torch.nn.utils.clip_grad_norm_(parameters, max_norm, norm_type=2)
Clips gradient norm of an iterable of parameters.
The norm is computed over all gradients together, as if they were concatenated into a single vector. Gradients are modified in-place.
Parameters:
- parameters (Iterable_[Tensor] or_ Tensor) – an iterable of Tensors or a single Tensor that will have gradients normalized
- max_norm (float or int) – max norm of the gradients
- norm_type (float or int) – type of the used p-norm. Can be
'inf'for infinity norm.
| Returns: | Total norm of the parameters (viewed as a single vector). |
|---|
clip_grad_value_
torch.nn.utils.clip_grad_value_(parameters, clip_value)
Clips gradient of an iterable of parameters at specified value.
Gradients are modified in-place.
Parameters:
- parameters (Iterable_[Tensor] or_ Tensor) – an iterable of Tensors or a single Tensor that will have gradients normalized
- clip_value (float or int) – maximum allowed value of the gradients The gradients are clipped in the range [-clip_value, clip_value]
parameters_to_vector
torch.nn.utils.parameters_to_vector(parameters)
Convert parameters to one vector
| Parameters: | parameters (Iterable_[Tensor]_) – an iterator of Tensors that are the parameters of a model. |
|---|---|
| Returns: | The parameters represented by a single vector |
| --- | --- |
vector_to_parameters
torch.nn.utils.vector_to_parameters(vec, parameters)
Convert one vector to the parameters
Parameters:
- vec (Tensor) – a single vector represents the parameters of a model.
- parameters (Iterable_[Tensor]_) – an iterator of Tensors that are the parameters of a model.
weight_norm
torch.nn.utils.weight_norm(module, name='weight', dim=0)
Applies weight normalization to a parameter in the given module.

Weight normalization is a reparameterization that decouples the magnitude of a weight tensor from its direction. This replaces the parameter specified by name (e.g. “weight”) with two parameters: one specifying the magnitude (e.g. “weight_g”) and one specifying the direction (e.g. “weight_v”). Weight normalization is implemented via a hook that recomputes the weight tensor from the magnitude and direction before every forward() call.
By default, with dim=0, the norm is computed independently per output channel/plane. To compute a norm over the entire weight tensor, use dim=None.
See https://arxiv.org/abs/1602.07868
Parameters:
- module (nn.Module) – containing module
- name (str, optional) – name of weight parameter
- dim (int, optional) – dimension over which to compute the norm
| Returns: | The original module with the weight norm hook |
|---|
Example:
>>> m = weight_norm(nn.Linear(20, 40), name='weight')
Linear (20 -> 40)
>>> m.weight_g.size()
torch.Size([40, 1])
>>> m.weight_v.size()
torch.Size([40, 20])
remove_weight_norm
torch.nn.utils.remove_weight_norm(module, name='weight')
Removes the weight normalization reparameterization from a module.
Parameters:
- module (nn.Module) – containing module
- name (str, optional) – name of weight parameter
Example
>>> m = weight_norm(nn.Linear(20, 40))
>>> remove_weight_norm(m)
spectral_norm
torch.nn.utils.spectral_norm(module, name='weight', n_power_iterations=1, eps=1e-12, dim=None)
Applies spectral normalization to a parameter in the given module.
Spectral normalization stabilizes the training of discriminators (critics) in Generaive Adversarial Networks (GANs) by rescaling the weight tensor with spectral norm  of the weight matrix calculated using power iteration method. If the dimension of the weight tensor is greater than 2, it is reshaped to 2D in power iteration method to get spectral norm. This is implemented via a hook that calculates spectral norm and rescales weight before every
of the weight matrix calculated using power iteration method. If the dimension of the weight tensor is greater than 2, it is reshaped to 2D in power iteration method to get spectral norm. This is implemented via a hook that calculates spectral norm and rescales weight before every forward() call.
See Spectral Normalization for Generative Adversarial Networks .
Parameters:
- module (nn.Module) – containing module
- name (str, optional) – name of weight parameter
- n_power_iterations (int, optional) – number of power iterations to calculate spectal norm
- eps (float, optional) – epsilon for numerical stability in calculating norms
- dim (int, optional) – dimension corresponding to number of outputs, the default is 0, except for modules that are instances of ConvTranspose1/2/3d, when it is 1
| Returns: | The original module with the spectal norm hook |
|---|
Example:
>>> m = spectral_norm(nn.Linear(20, 40))
Linear (20 -> 40)
>>> m.weight_u.size()
torch.Size([20])
remove_spectral_norm
torch.nn.utils.remove_spectral_norm(module, name='weight')
Removes the spectral normalization reparameterization from a module.
Parameters:
- module (nn.Module) – containing module
- name (str, optional) – name of weight parameter
Example
>>> m = spectral_norm(nn.Linear(40, 10))
>>> remove_spectral_norm(m)
PackedSequence
torch.nn.utils.rnn.PackedSequence(data, batch_sizes=None)
Holds the data and list of batch_sizes of a packed sequence.
All RNN modules accept packed sequences as inputs.
Note
Instances of this class should never be created manually. They are meant to be instantiated by functions like pack_padded_sequence().
Batch sizes represent the number elements at each sequence step in the batch, not the varying sequence lengths passed to pack_padded_sequence(). For instance, given data abc and x the PackedSequence would contain data axbc with batch_sizes=[2,1,1].
| Variables: |
- data (Tensor) – Tensor containing packed sequence
- batch_sizes (Tensor) – Tensor of integers holding information about the batch size at each sequence step
pack_padded_sequence
torch.nn.utils.rnn.pack_padded_sequence(input, lengths, batch_first=False)
Packs a Tensor containing padded sequences of variable length.
Input can be of size T x B x * where T is the length of the longest sequence (equal to lengths[0]), B is the batch size, and * is any number of dimensions (including 0). If batch_first is True B x T x * inputs are expected.
The sequences should be sorted by length in a decreasing order, i.e. input[:,0] should be the longest sequence, and input[:,B-1] the shortest one.
Note
This function accepts any input that has at least two dimensions. You can apply it to pack the labels, and use the output of the RNN with them to compute the loss directly. A Tensor can be retrieved from a PackedSequence object by accessing its .data attribute.
Parameters:
- input (Tensor) – padded batch of variable length sequences.
- lengths (Tensor) – list of sequences lengths of each batch element.
- batch_first (bool, optional) – if
True, the input is expected inB x T x *format.
| Returns: | a PackedSequence object |
|---|
pad_packed_sequence
torch.nn.utils.rnn.pad_packed_sequence(sequence, batch_first=False, padding_value=0.0, total_length=None)
Pads a packed batch of variable length sequences.
It is an inverse operation to pack_padded_sequence().
The returned Tensor’s data will be of size T x B x *, where T is the length of the longest sequence and B is the batch size. If batch_first is True, the data will be transposed into B x T x * format.
Batch elements will be ordered decreasingly by their length.
Note
total_length is useful to implement the pack sequence -> recurrent network -> unpack sequence pattern in a Module wrapped in DataParallel. See this FAQ section for details.
Parameters:
- sequence (PackedSequence) – batch to pad
- batch_first (bool, optional) – if
True, the output will be inB x T x *format. - padding_value (float, optional) – values for padded elements.
- total_length (int, optional) – if not
None, the output will be padded to have lengthtotal_length. This method will throwValueErroriftotal_lengthis less than the max sequence length insequence.
| Returns: | Tuple of Tensor containing the padded sequence, and a Tensor containing the list of lengths of each sequence in the batch. |
|---|
pad_sequence
torch.nn.utils.rnn.pad_sequence(sequences, batch_first=False, padding_value=0)
Pad a list of variable length Tensors with zero
pad_sequence stacks a list of Tensors along a new dimension, and pads them to equal length. For example, if the input is list of sequences with size L x * and if batch_first is False, and T x B x * otherwise.
B is batch size. It is equal to the number of elements in sequences. T is length of the longest sequence. L is length of the sequence. * is any number of trailing dimensions, including none.
Example
>>> from torch.nn.utils.rnn import pad_sequence
>>> a = torch.ones(25, 300)
>>> b = torch.ones(22, 300)
>>> c = torch.ones(15, 300)
>>> pad_sequence([a, b, c]).size()
torch.Size([25, 3, 300])
Note
This function returns a Tensor of size T x B x * or B x T x * where T is the length of the longest sequence. This function assumes trailing dimensions and type of all the Tensors in sequences are same.
Parameters:
- sequences (list[Tensor]) – list of variable length sequences.
- batch_first (bool, optional) – output will be in
B x T x *if True, or inT x B x *otherwise - padding_value (float, optional) – value for padded elements. Default: 0.
| Returns: | Tensor of size T x B x * if batch_first is False. Tensor of size B x T x * otherwise |
|---|
pack_sequence
torch.nn.utils.rnn.pack_sequence(sequences)
Packs a list of variable length Tensors
sequences should be a list of Tensors of size L x *, where L is the length of a sequence and * is any number of trailing dimensions, including zero. They should be sorted in the order of decreasing length.
Example
>>> from torch.nn.utils.rnn import pack_sequence
>>> a = torch.tensor([1,2,3])
>>> b = torch.tensor([4,5])
>>> c = torch.tensor([6])
>>> pack_sequence([a, b, c])
PackedSequence(data=tensor([ 1, 4, 6, 2, 5, 3]), batch_sizes=tensor([ 3, 2, 1]))
| Parameters: | sequences (list[Tensor]) – A list of sequences of decreasing length. |
|---|---|
| Returns: | a PackedSequence object |
| --- | --- |