
SU2 是一套用 C++ / Python 编写的,用于偏微分方程 (PDE) 的数值求解和 PDE 约束优化的工具集。
它的设计考虑了计算流体动力学 (CFD) 和空气动力学形状优化,并且可扩展,因此可以处理其它控制方程组,如流体动力学、弹性动力学、电动力学、化学反应流等。
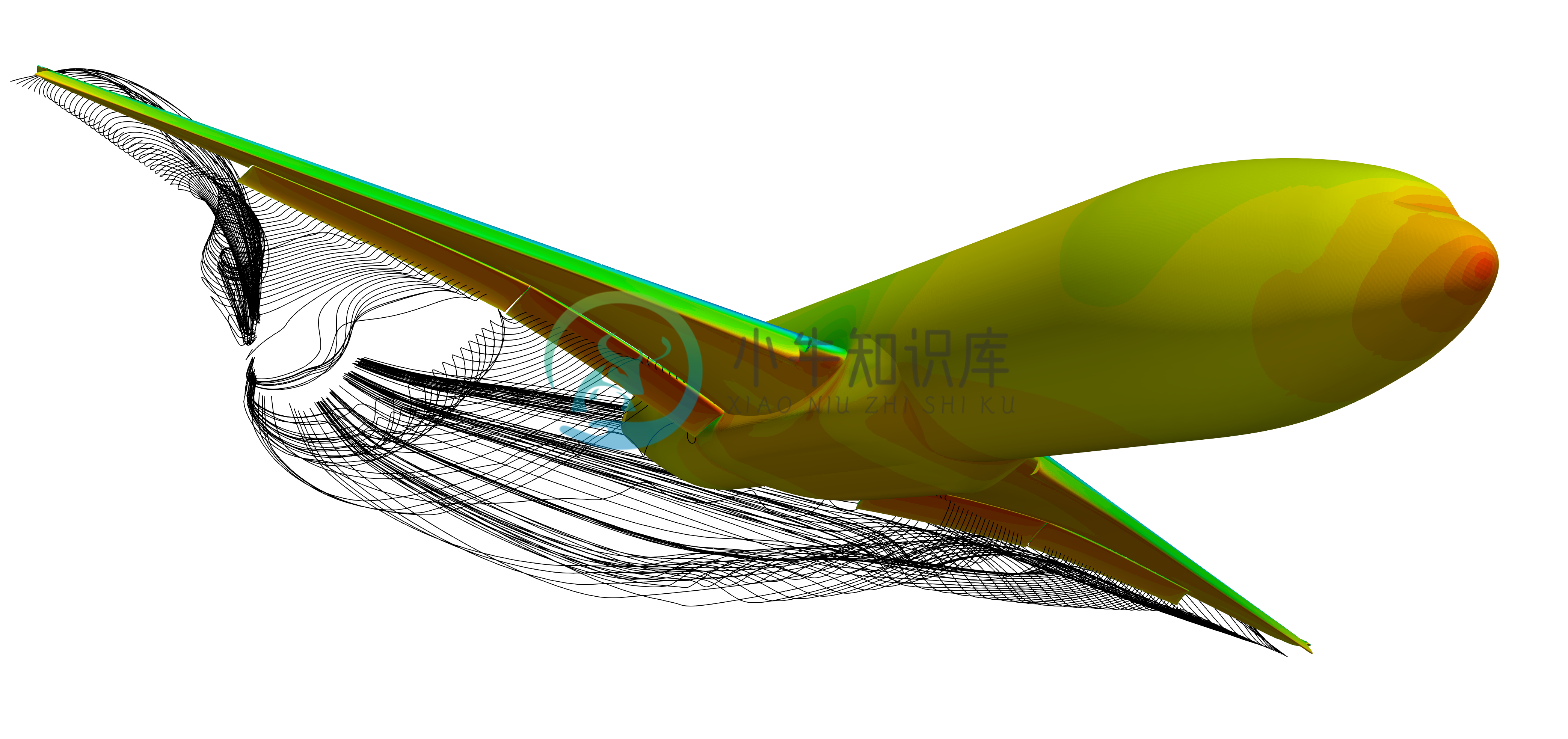
SU2 由斯坦福大学航空航天系航空航天设计实验室(ADL)和社区成员开发,采用 LGPL 许可发布,广泛适用于航空、汽车、船舶和可再生能源行业。

SU2 安装
二进制文件
可以在下载页面找到最新版本的 Linux、MacOS、Windows 预编译二进制文件。
-
由于研究生阶段要使用SU2进行流体的数值计算,近期刚刚上手,难免会遇到一些问题,故在此记录一下学习过程。 如果这些问题都能顺利解决的话,我应该还会写一些关于前期使用SU2的指南,毕竟现在网上关于SU2的中文资料还是很少的。 我使用的SU2为在Ubuntu 18.04.5 LTS下运行的7.0.6版本。 # 第一个问题 为了在计算大型问题时提高计算效率,在特别是在服务器上运行计算时,通常不需要在计算
-
安装环境 ubuntu18.04, SU2 7.3.1 第一步确保安装了gcc,g++,如果一些库需要使用gfortran也可以安装上 比如使用 sudo apt install g++ (在安装前也可以先更新列表,比如 sudo apt updata, sudo apt upgrade) 第二步 build openmpi ,到官网下载安装包,比如我使用version 4.1 配置环境 ./co
-
今天打算将阅读SU2代码的各个部分,记录下来。主要针对CFD部分理一理求解器的各个部分是怎样实现的。
-
SU2是美国斯坦福大学航空航天学院开发的高精度偏微分方程求解器,与NASA的CFL3D不同,它是一款非结构网格求解器,并且是基于C++开发的(这和OpenFOAM类似)。它不仅开展串行计算,还可以进行并行计算。同时具备了变形网格(即动网格)功能和网格自适应功能等。为提高计算效率,该代码采用多重网格来加速收敛。 SU2具有多种空间离散格式和多个通量限制器,可进行从低速不可压
-
1进入解压下在的安装包 tar-zxvf SU2v2.0.tgz 2进入软件的源代码目录 cdSU2v2.0/ 3查看该目录中的内容 ls aclocal.m4 ChangeLog COPYING install-sh missing trunk AUTHORS configure depcomp Makefile.am NEWS autom4te.cache co
-
去斯坦福大学的官网下载: http://adl.stanford.edu/docs/display/SUSQUARED/SU2+Home 在下载以前,需要填写一些信息,其实它只需要统计一下用户有多少人,也就是必须提供一些个人信息以及邮箱,并不会给你的邮箱发什么邮件。 它还提供相关的第三方软件包: ParaView (后处理软件,同样是开源的) Python 2.6.6 (SU2 写脚本就用这个语言
-
Linux中的su 和su - 前言背景: 笔者在在一次体验华为昇腾开发的过程了遇到了一个问题,就是一条atc的转换模型指令报出来错误:atc: invalid option -- '- '。最开始我还以为是不是因为英文指令中存在中文字符的问题导致linux环境中无法识别。后来参考一篇文章后终于破案了(atc: invalid option – ‘-‘_qq_49723795的博客-CSDN博客
-
功能说明:变更用户身份。 语法:su [-flmp][--help][--version][-][-c ;][-s ][用户帐号] 补充说明:su可让用户暂时变更登入的身份。变更时须输入所要变更的用户帐号与密码。 参数: -c;或--command=; 执行完指定的指令后,即恢复原来的身份。 -f或--fast 适用于csh与tsch,使shell不用去读取启动文件。 -.-l或--login
-
su和sudo的区别 共同点:都是root用户权限; 不同点:su只获得root权限,工作环境不变,还是在切换之前用户的工作环境;sudo是完全获得root的权限和root的工作环境。 sudo:表示获取临时的root权限执行命令。 sudo执行命令的流程: 1、当前用户切换到root(或其他指定切换到的用户), 2、以root(或其他指定的切换到的用户)身份执行命令, 3、执行完成后,直接退回到
-
su命令 su(switch user) 用于变更为其他使用者的身份。除 root 外,需要键入该使用者的密码, 使用权限:所有使用者。 su [-fmp] [-c command] [-s shell][-] [USER [ARG]] [--help] [--version] 参数说明 -m -p 或 --preserve-environment 执行 su 时不重置环境变量 -
-
translated_page: https://github.com/PX4/Devguide/blob/master/en/simulation/sitl.md translated_sha: b522243efef9deb5e2d3ae7bd03ae9ed0eee3418 Multi-Vehicle Simulation This tutorial explains how to simul
-
利用 UIDynamicAnimato 实现常见物理世界的物体动态行为,包括吸附物体、推动物体、刚性附着、弹性附着等。 [Code4App.com]
-
translated_page: https://github.com/PX4/Devguide/blob/master/en/simulation/airsim.md translated_sha: RETRANSLATE AirSim仿真 AirSim是一个基于虚幻引擎(Unreal Engine)的开源、跨平台无人机模拟器。它可以使用硬件在环(HITL)或软件在环(SITL)的方式为Pixh
-
translated_page: https://github.com/PX4/Devguide/blob/master/en/simulation/hitl.md translated_sha: 95b39d747851dd01c1fe5d36b24e59ec865e323e 硬件在环仿真 硬件在环仿真指的自驾仪与仿真器相连并且所有的代码运行在自驾仪上的仿真。这种方法的优点是可以测试代码在实际处
-
Gazebo是一个自主机器人3D仿真环境。它可以与ROS配套用于完整的机器人仿真,也可以单独使用。本文简要介绍单独的使用方法。 {% raw %} To view this video please enable JavaScript, and consider upgrading to a web browser that supports HTML5 video {% endraw %} {%
-
translated_page: https://github.com/PX4/Devguide/blob/master/en/simulation/sitl.md translated_sha: 95b39d747851dd01c1fe5d36b24e59ec865e323e 软件在环仿真 (SITL) 软件在环仿真是在主机上运行一个完整的系统并模拟自驾仪。它通过本地网络连接到仿真器。 设置成如
-
行动时刻 - 模拟代理计费 在my-org.com的FreeRADIUS服务器上执行以下操作: 将目录更改为my-org.com的FreeRADIUS服务器上用于模拟bob@your-org.com计费的文件所在的目录。 确保FreeRADIUS在代表my-org.com和your-org.com的服务器上以调试模式运行。 在my-org.com服务器上发出以下命令: $> radclient 1
-
Simulators allow PX4 flight code to control a computer modeled vehicle in a simulated “world”. You can interact with this vehicle just as you might with a real vehicle, using a QGroundControl, offboar