
CloudCompare是一款三维点云(Point Cloud)处理软件,可以方便地使用计算法向量、优化法向量、泊松构网、滤波等功能。
-
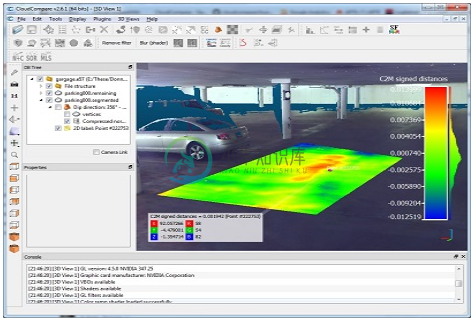
CloudCompare–安装和简单的使用方法 CloudCompare工具是一个非常好的处理点云数据的开源工具,有个不错的框架,很多公司对该工具进行二次开发以满足公司需要。第一次使用CloudCompare感觉非常好用。有兴趣的可以多了解一下。 软件的下载安装: CloudCompare百度网盘链接链接:https://pan.baidu.com/s/1sgEi_s5dPVUeG5MwMXLa
-
一、简介 有时候我们输入的数据并不是点云数据,如STL、PLY、OBJ等数据,他们都是模型数据(即三角网格数据),模型数据的优点就是具有了形状,因此也就有了相关的几何属性,我们可以基于他们进行体积、表面积的计算。不过坏处就是现有的点云配准算法均是基于“点”来进行对齐的过程,单纯只靠模型上的端点,有时很难将一个模型与点云进行配准。因此此时就需要对模型进行采样操作,也就是基于面片来采样出更多的点数据。
-
我正在探索mpld3库,不知道如何创建三维散点图。使用Matplotlib,我将执行以下操作: 类似地,我尝试使用mpld3(在Jupyter笔记本中):导入matplotlib。mpl_工具包中的pyplot作为plt。mplot3d导入轴3D导入mpld3 我得到了错误 有什么想法吗? 这是完整的错误日志:
-
一面 时长:57min 岗位:三维前端开发 1. 面试官介绍 2. 自我介绍 3. 实习情况问题 4. URL输入到渲染过程 5. 缓存策略(如何配置) 6. http发展历程 7. 详细说一下多路复用 8. 为什么setTimeout有时候不准确 9. 场景题:实现一个准确的定时器 10. requestAnimationFrame执行机制 11. 前端路由原理 12. JS原生API如何监听路
-
1. 介绍 2. 介绍实习 3. 介绍项目 4. 八股(Java多线程,JVM垃圾回收,MySQL索引,Web Socket) 5. 公司产品是否了解,是否接受加班,是否能够实习 反问: 什么是Web Socket,具体加班情况一周加班8小时。
-
10.3 完整解决方案 为了减少所需生成的子类数目,实现将操作系统和图像文件格式两个维度分离,使它们可以独立改变,Sunny公司开发人员使用桥接模式来重构跨平台图像浏览系统的设计,其基本结构如图10-5所示: 在图10-5中,Image充当抽象类,其子类JPGImage、PNGImage、BMPImage和GIFImage充当扩充抽象类;ImageImp充当实现
-
我目前正在尝试用分辨率来制作我的简单游戏比例。我注意到,当我改变分辨率时,并不是一切都正常。例如,从1280x720到1920x1080的转换,跳跃距离会略有变化。我注意到的主要问题是,当我以一定的速度发射炮弹时。在较低的分辨率下,它在屏幕上的传播速度似乎要快得多,我不明白为什么,因为它应该随着窗口的大小缩小。以下是发射炮弹的代码片段: 在这个场景中,m是我正在创建的一个盒子。在新盒子中(产卵x坐
-
我有一个3D坐标系,我用3D摄像机跟踪外部的三个点。 所以我在(x,y,z)空间中有三个点。 下一帧我再次跟踪这三个点。 我使用前三个点作为初始情况。现在我需要起草一个转换矩阵,给我的平移,旋转和缩放的第二个3点,与初始位置比较。 现在我真的不知道怎么做。 有没有一种方法可以直接生成变换矩阵,或者我必须先生成平移、旋转和缩放矩阵,然后再生成这三个矩阵的变换矩阵? 谢谢!j