
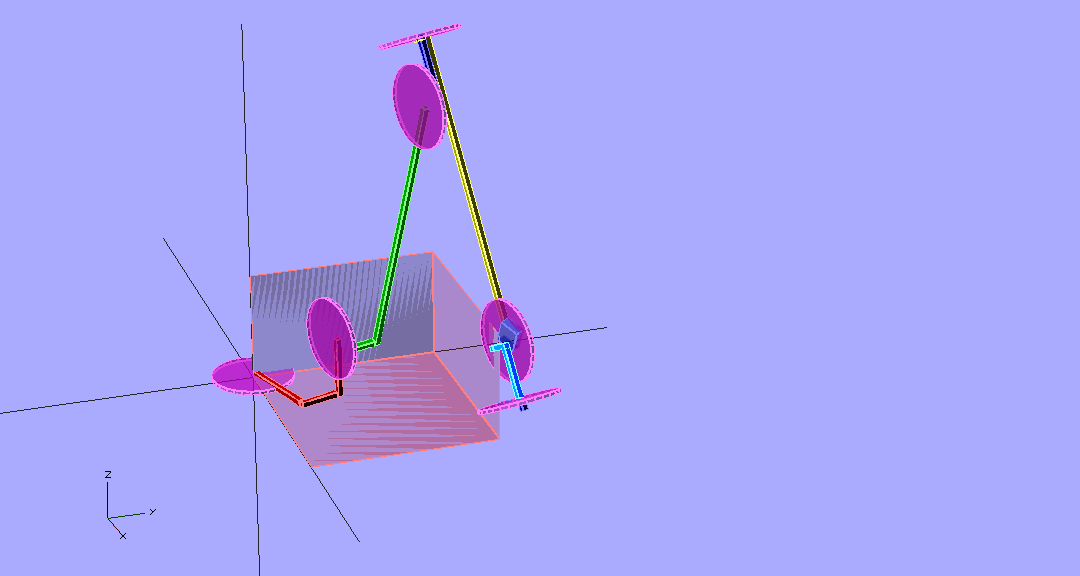
gmop3d是一款机械手臂(轴旋转运动)或工业机器人的运动仿真软件,他仅仅提供算法,不依赖任何第三方软件包,不依赖G代码,QT, boost, 是一个纯粹的C语言代码程序。
六轴机械手臂,第一版的算法仅仅支持三轴的机械手臂仿真算法。
模型,第一版仅支持立方体,支持立方体的位置移动, XYZ任意方向旋转,和任意尺寸,
仿真的精度也可以任意调整, 支持5个面的逐点坐标位置和机械手协同运动仿真。
算法仅仅使用了三角函数和逼近论提高精度,精度可以计算到0.000001mm,最多可以计算到小数点后10位。
仿真环境依赖openSCAD.因为这个软件生成的是一个openSCAD程序,然后利用openSCAD的
自动加载和编译, Automatic Reload and Compile功能实现运动仿真。
仿真的速度极其慢,因为openSCAD的 Automatic Reload and Compile功能是一秒钟一次,
所以仿真的画面是1秒钟一个,后期肯定可以调整的。
/** Related tutorial and manuals **/
视频教程 Videotutorial of animation
http://www.56.com/u50/v_MTI2MjM5Mjk1.html
http://www.56.com/u29/v_MTI2MjM3MDc0.html
用户手册和文档 Relatedtutorial and manuals.
gmop3dtutorial
https://downloads.sourceforge.net/project/gmop3d/gmop3d_Tutorial.pdf?r=&ts=1412132836&use_mirror=nchc
https://downloads.sourceforge.net/project/gmop3d/gmop3d_Tutorial.doc?r=&ts=1412132814&use_mirror=nchc
中文版openSCAD
https://downloads.sourceforge.net/project/gmop3d/openSCAD_CN_user_manual.html?r=&ts=1412132374&use_mirror=nchc
https://downloads.sourceforge.net/project/gmop3d/openSCAD_CN_user_manual.pdf?r=&ts=1412132444&use_mirror=nchc
Englishversion openSCAD
https://downloads.sourceforge.net/project/gmop3d/OpenSCAD_user_manual-20130703.pdf?r=&ts=1412132497&use_mirror=jaist
-
导航是机器人系统中最重要的模块之一,比如现在较为流行的服务型室内机器人,就是依赖于机器人导航来实现室内自主移动的,本章主要就是介绍仿真环境下的导航实现,主要内容有: 导航相关概念 导航实现:机器人建图(SLAM)、地图服务、定位、路径规划....以可视化操作为主。 导航消息:了解地图、里程计、雷达、摄像头等相关消息格式。 预期达成的学习目标: 了解导航模块中的组成部分以及相关概念 能够在仿真环境下
-
对于ROS新手而言,可能会有疑问:学习机器人操作系统,实体机器人是必须的吗?答案是否定的,机器人一般价格不菲,为了降低机器人学习、调试成本,在ROS中提供了系统的机器人仿真实现,通过仿真,可以实现大部分需求,本章主要就是围绕“仿真”展开的,比如,本章会介绍: 如何创建并显示机器人模型; 如何搭建仿真环境; 如何实现机器人模型与仿真环境的交互。 本章预期的学习目标如下: 能够独立使用URDF创建机器
-
3.3.1.仿真器 vs 真机 在大多数情况下,应用在仿真器上执行,与在真机上是没有区别的。少数的例外情况则往往是因为难以模拟,比如传感器。一般的硬件相关特性比如电话呼叫、地理定位等等,都可以由仿真器模拟。
-
translated_page: https://github.com/PX4/Devguide/blob/master/en/simulation/sitl.md translated_sha: b522243efef9deb5e2d3ae7bd03ae9ed0eee3418 Multi-Vehicle Simulation This tutorial explains how to simul
-
NowCoder 题目描述 地上有一个 m 行和 n 列的方格。一个机器人从坐标 (0, 0) 的格子开始移动,每一次只能向左右上下四个方向移动一格,但是不能进入行坐标和列坐标的数位之和大于 k 的格子。 例如,当 k 为 18 时,机器人能够进入方格 (35,37),因为 3+5+3+7=18。但是,它不能进入方格 (35,38),因为 3+5+3+8=19。请问该机器人能够达到多少个格子? 解
-
3.3.仿真器 在仿真器(Emulator)上执行程序,与在真机上执行的效果是一样的。这是因为仿真器是机器码级别的仿真,其机器码与真机相同。 Tip: 模拟器(Simulator)与仿真器(Emulator)名字很像,但有着本质的不同。“仿真器”的意思是模仿真机执行机器码的过程,接近于“虚拟机”。而“模拟器”是在相对较高的层次上模拟代码的行为。Android SDK附带了一个基于QEMU的仿真器。
-
translated_page: https://github.com/PX4/Devguide/blob/master/en/simulation/airsim.md translated_sha: RETRANSLATE AirSim仿真 AirSim是一个基于虚幻引擎(Unreal Engine)的开源、跨平台无人机模拟器。它可以使用硬件在环(HITL)或软件在环(SITL)的方式为Pixh
-
translated_page: https://github.com/PX4/Devguide/blob/master/en/simulation/hitl.md translated_sha: 95b39d747851dd01c1fe5d36b24e59ec865e323e 硬件在环仿真 硬件在环仿真指的自驾仪与仿真器相连并且所有的代码运行在自驾仪上的仿真。这种方法的优点是可以测试代码在实际处