
python-opencv在有噪音的情况下提取图像的轮廓实例

对于一般的图像提取轮廓,介绍了一个很好的方法,但是对于有噪声的图像,并不能很好地捕获到目标物体。
比如对于我的鼠标,提取的轮廓效果并不好,因为噪声很多:
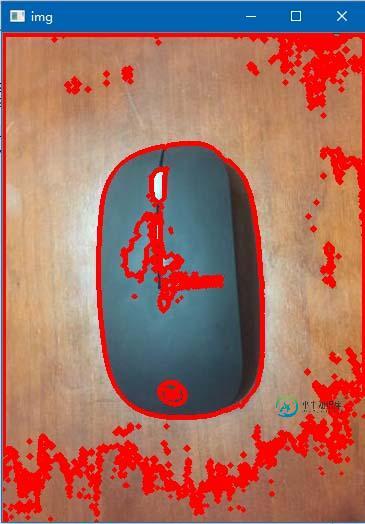
所以本文增加了去掉噪声的部分。
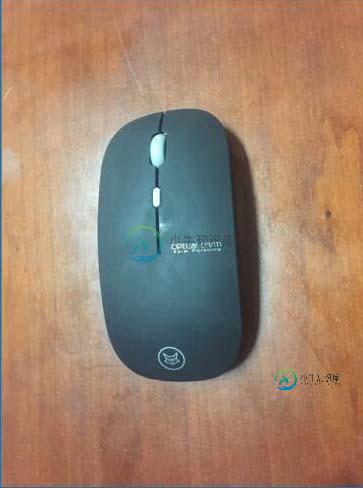
首先加载原始图像,并显示图像
img = cv2.imread("temp.jpg") #载入图像
h, w = img.shape[:2] #获取图像的高和宽
cv2.imshow("Origin", img)
然后进行低通滤波处理,进行降噪
blured = cv2.blur(img,(5,5)) #进行滤波去掉噪声
cv2.imshow("Blur", blured) #显示低通滤波后的图像

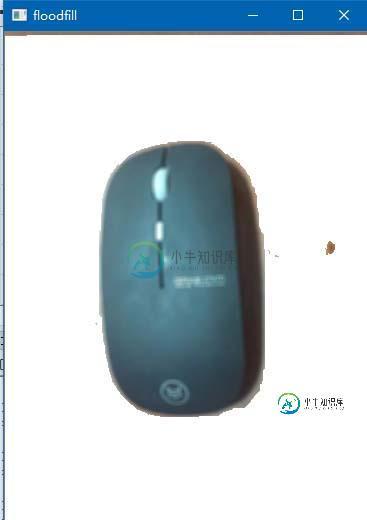
使用floodfill来去掉目标周围的背景,泛洪填充类始于ps的魔棒工具,这里用来清除背景。
然后转换成灰度图
gray = cv2.cvtColor(blured,cv2.COLOR_BGR2GRAY)
cv2.imshow("gray", gray)
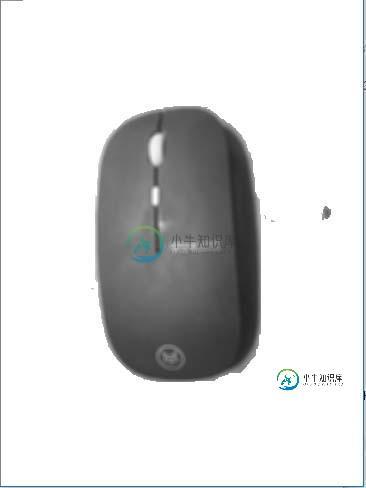
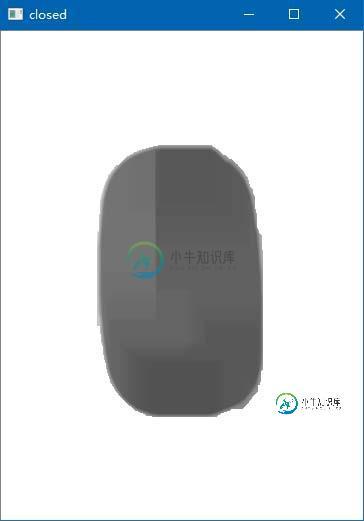
此时目标图像周围有写不光滑,还有一些噪声,因此进行开闭运算,得到比较光滑的目标
#定义结构元素
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(50, 50))
#开闭运算,先开运算去除背景噪声,再继续闭运算填充目标内的孔洞
opened = cv2.morphologyEx(gray, cv2.MORPH_OPEN, kernel)
closed = cv2.morphologyEx(opened, cv2.MORPH_CLOSE, kernel)
cv2.imshow("closed", closed)
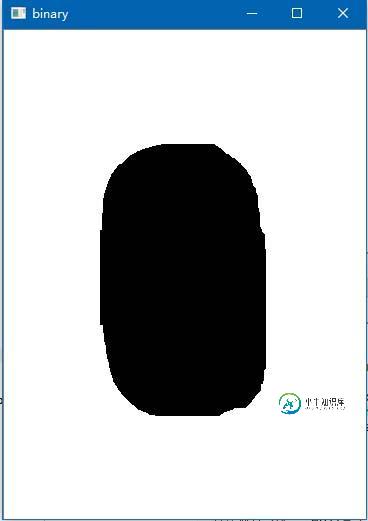
接着转换成二值图以便于获取图像的轮廓
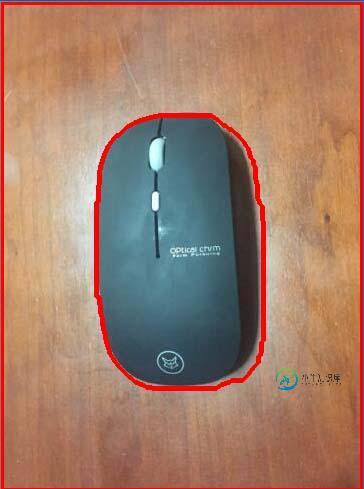
最后进行轮廓提取,抓取到目标
#找到轮廓
_,contours, hierarchy = cv2.findContours(binary,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
#绘制轮廓
cv2.drawContours(img,contours,-1,(0,0,255),3)
#绘制结果
cv2.imshow("result", img)
全部代码如下
#coding=utf-8
import cv2
import numpy as np
img = cv2.imread("temp.jpg") #载入图像
h, w = img.shape[:2] #获取图像的高和宽
cv2.imshow("Origin", img) #显示原始图像
blured = cv2.blur(img,(5,5)) #进行滤波去掉噪声
cv2.imshow("Blur", blured) #显示低通滤波后的图像
mask = np.zeros((h+2, w+2), np.uint8) #掩码长和宽都比输入图像多两个像素点,满水填充不会超出掩码的非零边缘
#进行泛洪填充
cv2.floodFill(blured, mask, (w-1,h-1), (255,255,255), (2,2,2),(3,3,3),8)
cv2.imshow("floodfill", blured)
#得到灰度图
gray = cv2.cvtColor(blured,cv2.COLOR_BGR2GRAY)
cv2.imshow("gray", gray)
#定义结构元素
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(50, 50))
#开闭运算,先开运算去除背景噪声,再继续闭运算填充目标内的孔洞
opened = cv2.morphologyEx(gray, cv2.MORPH_OPEN, kernel)
closed = cv2.morphologyEx(opened, cv2.MORPH_CLOSE, kernel)
cv2.imshow("closed", closed)
#求二值图
ret, binary = cv2.threshold(closed,250,255,cv2.THRESH_BINARY)
cv2.imshow("binary", binary)
#找到轮廓
_,contours, hierarchy = cv2.findContours(binary,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
#绘制轮廓
cv2.drawContours(img,contours,-1,(0,0,255),3)
#绘制结果
cv2.imshow("result", img)
cv2.waitKey(0)
cv2.destroyAllWindows()
以上这篇python-opencv在有噪音的情况下提取图像的轮廓实例就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持小牛知识库。
-
目标 了解轮廓是什么。 学习查找轮廓,绘制轮廓等。 你将看到以下功能:cv.findContours(),cv.drawContours() 什么是轮廓? 轮廓可以简单地解释为连接具有相同颜色或强度的所有连续点(沿边界)的曲线。轮廓是用于形状分析以及对象检测和识别的有用工具。 为了获得更高的准确性,请使用二进制图像。因此,在找到轮廓之前,请应用阈值或canny边缘检测。 从OpenCV 3.2开始
-
我想,我很理解函数“cv2.FindOntours(图像、模式、方法)。但我在opencv的一个文档中得到了这个东西轮廓,层次=cv2.FindOntours(thresh,2,1)。我不明白这里2,1的含义以及为什么使用它们。请有人解释一下。
-
本文向大家介绍如何使用Java OpenCV库查找图像轮廓?,包括了如何使用Java OpenCV库查找图像轮廓?的使用技巧和注意事项,需要的朋友参考一下 轮廓线不过是连接沿着特定形状的边界的所有点的线。使用这个你可以- 查找对象的形状。 计算对象的面积。 检测物体。 识别对象。 您可以使用findContours()方法找到图像中各种形状的轮廓,对象。此方法接受以下参数- 二进制图像。 类型为M
-
本文向大家介绍C语言实现opencv提取直线、轮廓及ROI实例详解,包括了C语言实现opencv提取直线、轮廓及ROI实例详解的使用技巧和注意事项,需要的朋友参考一下 一、Canny检测轮廓 在上一篇文章中有提到sobel边缘检测,并重写了soble的C++代码让其与matlab中算法效果一致,而soble边缘检测是基于单一阈值的,我们不能兼顾到低阈值的丰富边缘和高阈值时的边缘缺失这两个问题。而c
-
我有一个边缘被坎尼探测到。我想提取边缘的轮廓。 我已经检查了下面的帖子。OpenCV转换Canny边缘到轮廓。 但是它没有处理复杂的形状。例如,带矩形的圆或带线的圆。 cv::findContours()函数有两个问题。1.返回非闭合边的闭合轮廓,但我需要非闭合轮廓2。为闭合边返回2个闭合轮廓(可能其中一个轮廓用于边,另一个用于边的内侧,但我想要两个轮廓中的一个。 有没有办法解决这个问题?谢谢。
-
我想检查每个Canny检测到的边缘,并寻找其中的主线(以检查它们是否似乎形成矩形,例如,如果2对线是平行的等)。)。 Imgproc。HoughLinesP做了我想要的,但它给出了整个图像的线条,我想知道哪些线条来自相同的边缘。 我也尝试了FindContour,并用大约PolyDP在每个轮廓中寻找主线,但这看起来不合适,因为Canny检测到的边缘经常有缺口。这给出了边缘的轮廓,而不是边缘本身。