《同程旅行》专题
-
无法使用docker-compose在不同端口运行Python烧瓶应用程序
我正在使用docker compose在Python中运行Flask应用程序。我能够使用5000端口运行Flask应用程序。除此之外,我正在另一个应用程序6000上运行。但我无法在6000端口上运行它。任何帮助都将不胜感激。 docker-compose.yml 应用程序。py公司 Dockerfile: requirements.txt 6000端口正在监听。通过使用主机和端口执行nc命令,我能
-
解释的线程-每次im运行代码时都有不同的答案
我试图创建10个线程,每个线程运行100.000次。因此,我做了一个循环,循环每一个线程。它应该每次递增静态x+1。
-
如何强制CompletableFuture.thenApply()在运行前一阶段的相同线程上运行?
以下是我面临的问题的简短代码版本: 这是我得到的输出: 我很惊讶地看到在那里!当我取消注释调用,甚至取消注释单个语句时,我预计会发生这样的事情: 我理解将确保它不会在线程上运行,但是我想避免将供应商返回的数据从运行的线程传递到将要运行的线程然后在链中应用其他后续的代码。
-
在不同线程上运行时,Hibernate会不必要地创建新实体
我正在使用Spring Data JPA,以违反直觉的行为运行以下测试结果 进一步研究Hibernate的代码库,它出现在一个新线程上,persistentContext被清除干净。因此,就而言,我的实体变成了分离状态...创建了一系列决策,这些决策莫名其妙地导致生成一个新ID 我引用的特定代码位于:https://github.com/hibernate/hibernate-orm/blob/m
-
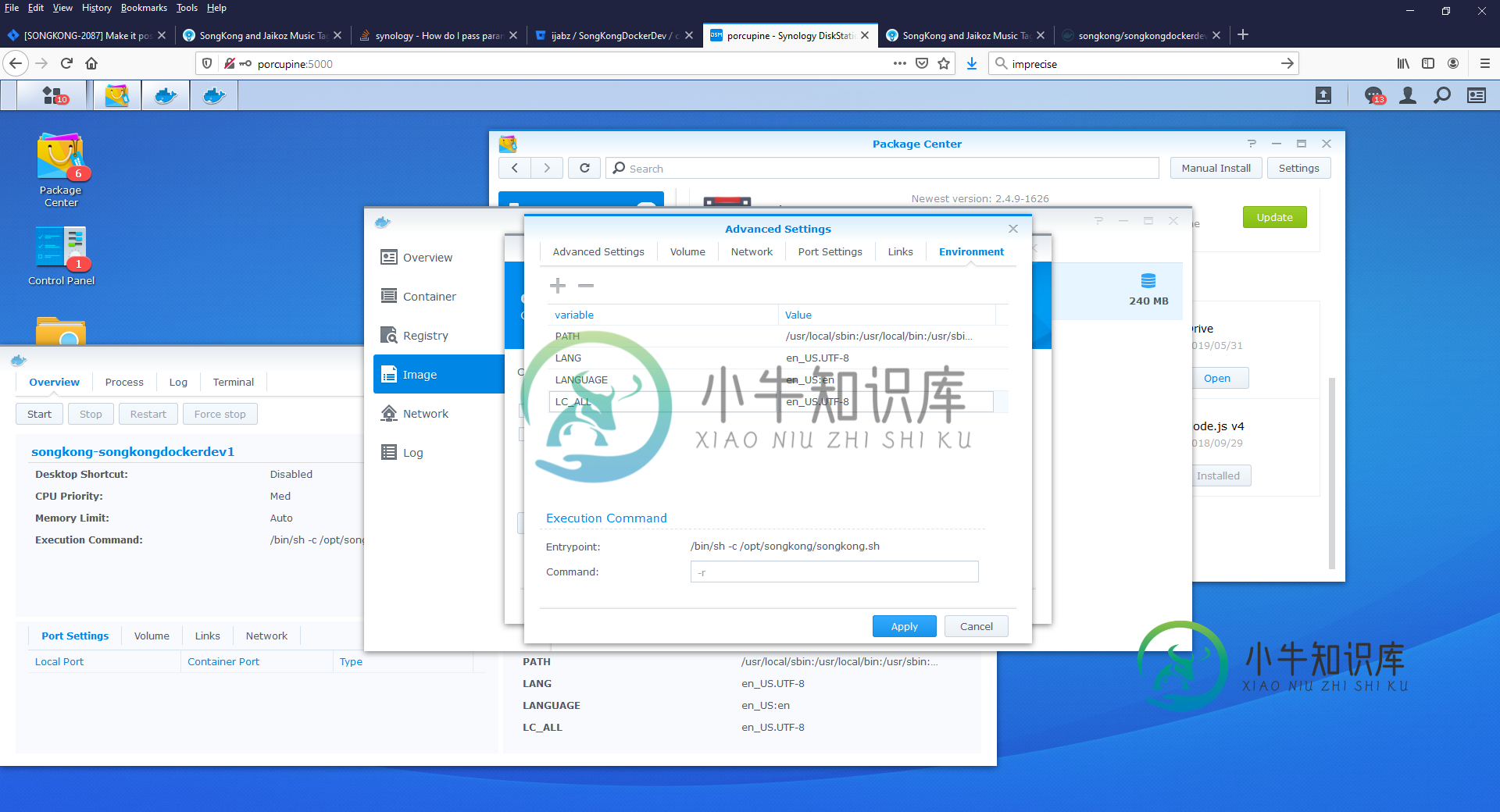 如何允许用户使用不同的参数运行 Docker 应用程序
如何允许用户使用不同的参数运行 Docker 应用程序我为我的Java应用程序构建了一个Docker映像——https://bit bucket . org/ijabz/songkongdocker/src/master/Docker file 最后一行是 songremote.sh 的(简化)内容是 而且效果很好。 然而,我有一个客户想使用-m选项和路径运行songkong 例如 > 那么,有没有办法让一个泊坞站允许运行两个不同的命令,或者我必须构
-
在应用程序启动前运行自定义代码的不同方法
您能否描述在应用程序启动数据初始化或其他操作之前运行自定义代码的不同方法?(如、等) 它们之间有什么不同?在哪种情况下使用它们更好?我想知道的不仅仅是一种方法,而是一种理解什么时候和什么我需要使用。 这里有一个足够老的问题,有太多的选项可以这样做:在Spring Boot开始后运行代码 如果问这个问题是一个错误的地方,请给我指出正确的地方。
-
SocketError: getaddrinfo同时运行heroku在Heroku应用程序上运行rake db:seed-rails 4
我使用的是。我在Heroku上推送了我的应用程序 运行附着在终端上...向上, 渲染设备/邮件/confirmation_instructions.html.erb (1.8毫秒) 发送邮件到 xyz@gmail.com (29.3ms) 耙子中止了!SocketError: 名称解析/应用程序/供应商/捆绑包/红宝石/2.0.0/宝石/邮件-2.5.4/库/邮件/网络/delivery_meth
-
同态
本文向大家介绍同态,包括了同态的使用技巧和注意事项,需要的朋友参考一下 如果两个图G 1和G 2是同构的,则可以通过将G的某些边除以更多的顶点而从同一图'G'中获得每个图。看下面的例子- 通过添加一个顶点将边缘“ rs”划分为两个边缘。 下面显示的图形与第一个图形同构。 如果G 1与G 2同构,则G与G 2同胚,但是反之则不必成立。 具有4个以下顶点的任何图形都是平面的。 任何具有8个以下边缘的图
-
胡同
有一个死胡同,宽度刚好只能让一辆汽车通过,偏偏老有汽车开到死胡同来,这下麻烦了,最先开来的汽车要最后才能倒退出去。给定一个汽车开来的序列和一个可能的倒车出去的序列,请判断汽车能否都倒退出去,若能则输出Yes,否则输出No。 输入格式: 首先输入一个整数T,表示测试数据的组数,然后是T组测试数据。每组测试数据首先输入一个正整数n(n≤10),代表开来的汽车数,然后输入2n个整数,其中,前n个整数表示
-
同步
您可以通过 Bluetooth 连接以无线方式将数据从 Verity Sense 传输到 Polar Flow 应用。或者,您可以使用 USB 端口和 FlowSync 软件,将 Verity Sense 与 Polar Flow 网络服务同步。若要在 Verity Sense 与 Polar Flow 应用之间同步数据,您需要拥有 Polar 账户。如果您想要将 Verity Sense 上的数
-
同步
EasyReact 是允许环形连接的,环形的连接使得多个节点可以进行同步。下面介绍关于同步的操作。 syncWith 针对于两个节点的同步,syncWith可以快速的帮我们建立两个节点的同步连接: EZRMutableNode<NSNumber *> *nodeA = [EZRMutableNode new]; EZRMutableNode<NSNumber *> *nodeB = [EZRMut
-
同步
要在 M600 的 Polar 应用程式、Polar Flow 移动应用程式以及 Polar Flow 网络服务之间同步数据,您需要拥有 Polar 账户。如您完成M600 的设置,则您已创建了一个账户。 自动同步训练数据 在您完成一次训练后,M600 上的 Polar 应用程式自动将您的训练及活动数据与 Polar Flow 应用程式同步。若要使用自动同步功能,您需要使用您的 Polar 账户登
-
同步
您可以通过 USB 端口与 FlowSync 软件或通过 Bluetooth Smart® 无线方式与 Flow 程序传输来自 A300 的数据。如要在 A300 与 Flow 网络服务和程序之间同步数据,您需要拥有 Polar 账户与 FlowSync 软件。如果您在 flow.polar.com/start中设置了 A300,说明您已创建了该账户并下载了该软件。当您开始使用 A300 时,您进
-
什么时候应该使用多线程?如果不同的线程执行相互独立的任务,多线程会有所好处吗?
问题内容: 这是我昨晚被拒绝的采访中唯一无法回答的两个问题。 问题答案: 问:什么时候应该使用多线程? 答:“您的问题非常广泛。只有很少的一个线程可以简单,快速和可靠地满足功能,这是非平凡的系统。例如:[选择目标公司出售的典型系统并挑选一个它的功能的两个方面会更好地发挥作用- 繁重的CPU,通信,多用户-只是选择一些可能的原因并进行解释]。 问:如果不同的线程执行相互独立的任务,多线程会有所好处吗
-
我需要一个Nodejs调度程序,该调度程序允许以不同的时间间隔执行任务
问题内容: 我正在寻找一个节点作业计划,该计划将允许我以不同的时间间隔计划许多任务。例如, 每30秒调用一次函数A 每60秒调用一次功能B 每7天调用一次函数C 我还希望能够启动和停止该过程。 到目前为止,我已经看过: 稍后 -语法使我感到困惑,显然您也不能安排一个月以上的任务 议程 -似乎是最有前途的,但是我对数据库功能感到困惑 时间计划 -太简单了,无法启动和停止 我发现后者的语法令人困惑。