《通信算法》专题
-
串行端口通信,write()出现问题
我在一台linux机器上用C语言编写了一个对串行端口进行读写的程序。它连接到一个运行模拟器的Windows XP机器,该模拟器正在发送我的程序数据。 有人知道为什么会这样吗?我尝试过在fd上执行读写操作时使用互斥,但这似乎没有什么不同。如果另一个线程正在从端口运行/读取,这似乎也无关紧要。欢迎任何意见或建议,谢谢
-
容器之间的通信连接失败
当我码头工人运行Kafka集装箱 [2018-07-15 01:31:58,369]信息打开到服务器本地主机/127.0.0.1:2181的套接字连接。将不尝试使用SASL(未知错误)(org.apache.zookeeper.clientcnxn)[2018-07-15 01:31:58,373]警告会话0x0服务器为空,意外错误,关闭套接字连接并试图重新连接(org.apache.zookee
-
两个片段之间的基本通信
我有一个活动- 。在这个活动中,我有两个片段,这两个片段都是我在xml中以声明方式创建的。 我正在尝试将用户输入的文本的传递到Fragment B 我知道一个片段可以使用获得对其活动的引用。所以我猜我会从那里开始?
-
来自C#visual studio的Arduino串行通信
Arduino代码 虽然很简单,但有一个问题,可能是因为我无法理解串行方法。它首先向串口发送一个测试字节,告诉计算机上的C#程序它可以开始发送信息。接下来,它会检查序列中是否有任何字节,如果有,它会检查第一个字节是否与r、g或b中的任何一个匹配,并从序列中获取接下来的三个字节,并将其转换为整数。 在VisualStudio方面 在visual studio上,如果它检测到arduino已使用“x”
-
多个docker-compose项目之间的通信
如何确保中的容器可以将请求发送到中的容器? 我知道可以使用为单个容器设置选项,以便为该容器分配特定的IP地址,但使用时似乎该选项不可用。 目前,我将执行一个并查看输出中的网关。它起作用但问题是这个IP是随机归属的,所以我不能依赖它。 因此,这一问题的另一种形式可能是: 可以使用Docker-Compose将固定IP地址归属于特定容器吗? 两个不同的docker-compose项目如何相互通信?
-
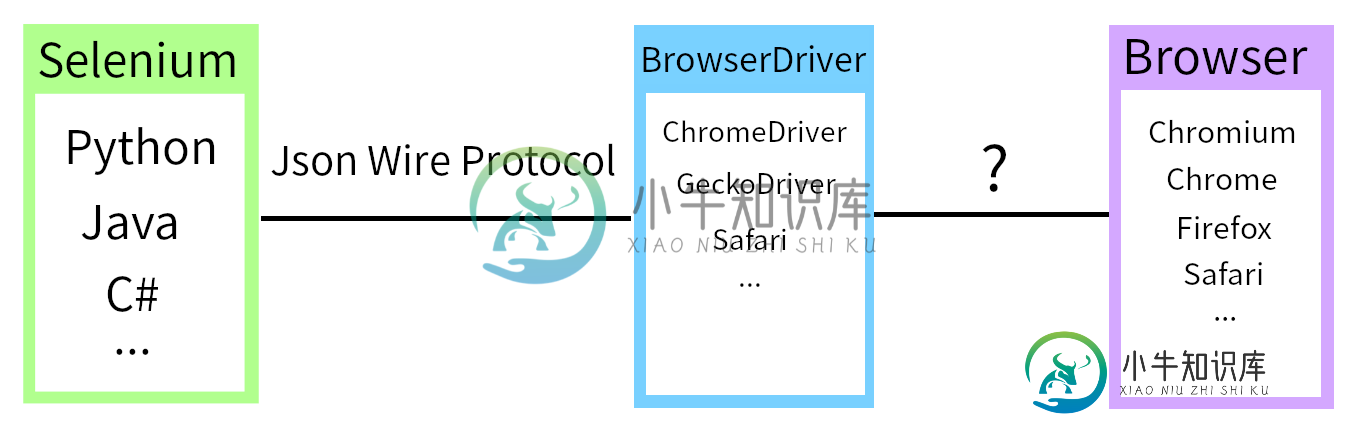 webdriver如何与浏览器通信/工作?
webdriver如何与浏览器通信/工作?我正在使用Selenium作为网络爬虫,它在大多数情况下运行良好,但一些网站可以检测到它,所以我决定深入学习。 经过一番搜索,我找到了"ChromeDevTools协议"和"Json Wire协议"。 “Json Wire Protocol”在Selenium和Webdriver之间工作,作为Python Java C#和其他语言的实现,因此它们可以通过统一协议与Webdriver通信,几篇文章解
-
通话或短信中的电话位置
我是一名android应用程序开发人员。我只是想知道,我们能不能通过打电话或发短信给一个电话号码来获取这个号码的地理位置?就像在whatsapp中,我们可以看到这个人最后出现的时间,同样我们也可以得到最后出现的时间和最后的确切位置。这是在facebook messenger中找到的。我只是好奇是否可以只用一个电话号码。
-
不能通过firebase手机发送短信
我在科特林是新来的。试图通过firebase phone auth发送短信,但我得到了
-
两个JavaFx控制器之间的通信
我做了一个控制器和视图(fxml)的结构来尽可能地分离我的代码,我想知道如何在两个控制器之间进行通信。我的意思是,一个控制器必须调用另一个控制器的一些函数来设置它是最新的。 我认为我当前结构的一个图式会更明确: 精确度: 我在此基础上开发了我的应用程序:http://www.zenjava.com/2011/10/25/views-intern-views-controllers-intern-c
-
7. ipcs 查询进程间通信状态
ipcs是Linux下显示进程间通信设施状态的工具。可以显示消息队列、共享内存和信号量的信息。对于程序员非常有用,普通的系统管理员一般用不到此指令。 7.1. IPC资源查询 查看系统使用的IPC资源 - ipcs ------ Shared Memory Segments -------- key shmid owner perms bytes
-
2.1.3 授信状态变更通知回调
描述 如果在调用 融资申请创建API 时填写了 callbackURL 参数,当资金方反馈审批结果时,会通过此接口下发回调通知。 此接口统一使用 POST 请求进行参数传递,body 内容为明文,只要返回的 HTTP 返回的状态码为200即认为回调成功,否则会最多重试3次,每次间隔3分钟。 某个申请一旦回调成功,或回调重试次数达到3次,则不会再次通知(但可以通过申请状态查询接口进行主动查询)。 请
-
Whale (OCTO-RPC C++侧)服务通信框架
随着分布式技术和微服务思想流行,技术公司逐步将服务拆分为独立运行的小模块,提高系统整体的健壮性,加快特性的演进速度。微服务通过定义完善的接口进行交互,解耦系统、敏捷迭代、方便服务治理。RPC是目前微服务最广泛的通信方式。然而,众多团队各自研发具备服务治理功能的RPC通信框架,一方面增加开发成本,消耗人力重复造轮子;另一方面不同序列化协议的RPC服务,无法互相通信,影响可用性。因此,通用的RPC通信
-
2.1.3 话题通信基本操作 B Python
2.1.3 话题通信基本操作B(Python) 需求: 编写发布订阅实现,要求发布方以10HZ(每秒10次)的频率发布文本消息,订阅方订阅消息并将消息内容打印输出。 分析: 在模型实现中,ROS master 不需要实现,而连接的建立也已经被封装了,需要关注的关键点有三个: 发布方 接收方 数据(此处为普通文本) 流程: 编写发布方实现; 编写订阅方实现; 为python文件添加可执行权限; 编辑
-
2.1.2 话题通信基本操作 A C++
2.1.2 话题通信基本操作A(C++) 需求: 编写发布订阅实现,要求发布方以10HZ(每秒10次)的频率发布文本消息,订阅方订阅消息并将消息内容打印输出。 分析: 在模型实现中,ROS master 不需要实现,而连接的建立也已经被封装了,需要关注的关键点有三个: 发布方 接收方 数据(此处为普通文本) 流程: 编写发布方实现; 编写订阅方实现; 编辑配置文件; 编译并执行。 1.发布方 /*
-
使用 Wi-Fi 进行局域网通信
光环板之间可以组成局域网,组成局域网的设备之间可以相互通讯,使用一个光环板就可以控制其他光环板。 用光环板A控制光环板B 让我们新建一个项目,使用两块光环板,实现用光环板A控制光环板B。 启动光环板A的局域网 1. 选择“设备”,添加光环板。用USB数据线将光环板与电脑相连,点击“连接”,连接设备。 2. 启用上传模式 3. 添加事件类积木 当光环板启动时,和局域网类积木 建立名为(mesh1)的