《科大讯飞笔试》专题
-
 北京飞渡前端一面
北京飞渡前端一面自我介绍 CSS 选择器的权重 ? BFC ? ES6 和 ES5 定义变量的区别? ES6 类的思想? 有几种方式实现一个类? HTML 5 前后端通信有哪些方法? vue2 vue3 生命周期的区别? vue3 的 组合式 API 的优势? vue2 和 vue3 还有哪些区别? 为什么 vue3 用 proxy ? vue3 的 ref 和 reactive 有什么区别? CommonJS
-
 字节飞书-测开-一面
字节飞书-测开-一面0923 飞书 测开 一面 自我介绍 介绍一下你的项目背景 你对SPRING 和SpringBOOT的理解 前端到后端的过程 = 输入URL后的全部过程 后端是如何对数据进行处理的 Post和get的区别 出现问题 如何定位问题 数据库 两张表 客户信息和订单表 查询金额数目前三的客户信息及金额 你如何设计两张表来实现以上查询 另外就是如何设计以上两个表的索引 如果订单被取消了 那么如何对表进行修
-
 C#实现骑士飞行棋
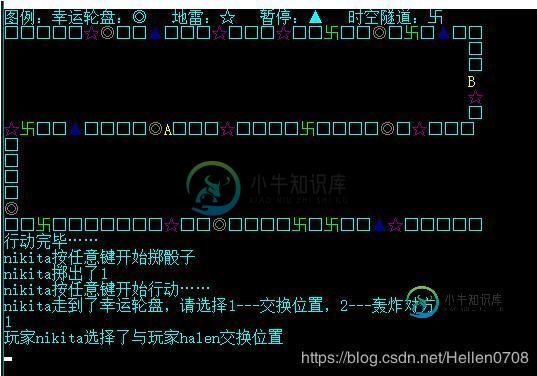
C#实现骑士飞行棋本文向大家介绍C#实现骑士飞行棋,包括了C#实现骑士飞行棋的使用技巧和注意事项,需要的朋友参考一下 前言 飞行棋小游戏是学习C#以来,接触的第一个游戏项目,根据小杨老师的思路引导,自己的代码也实现了功能,经过思路的梳理,试着不借助代码自己去实现功能,感触就是不管想的多明白,实践起来完全不一样,所以,还得多多实践,培养严谨的逻辑思维。下面看看我梳理的思路~ 游戏中界面 飞行棋流程思路 掷骰子流程 游
-
Java使用飞碟生成PDF
我使用的罐子来自maven repo 我正在测试的代码来自以前的堆栈解决方案 我担心它可能过时了,因为图书馆被贬值了。测试以下代码时: 这一行我有以下错误:
-
飞行模拟器摄像机
编辑:我上传了一段视频到youtube,显示了现在发生的事情。当我旋转60度(俯仰或偏航)时,我会感到奇怪的摇晃。如您所见,鼠标输入工作正常(没有不需要的滚动,滚动后本地会发生俯仰/偏航) 我正试图在我正在制作的OpenGL游戏中实现一个飞行模拟器摄像头。我遵循了本页底部提到的内容,对视图矩阵的计算结果如下: 其中,我根据鼠标输入计算一个增量俯仰/偏航四元数,然后将其应用于相机的方向。然后,我根据
-
飞碟-不呈现html实体
我正在使用飞碟库生成pdf。但是我对一些html实体有问题。 我已经在搜索解决方案了,我在这个论坛和其他地方找到了很多提示,但仍然存在问题。 我尝试过这种方法: http://sdtidbits.blogspot.com/2008/11/flying-saucer-xhtml-rendering-and-local.html 但没有任何成功 我的代码如下所示: 其中pdf是要创建的新pdf的名称,
-
飞行路线迁移失败
在类路径中:/db。迁移有迁移但flyway没有看到这一点,而是爱上了msg 2022-05-02 17:28:07.993INFO 45296 --- [ restartedMain]c. c. c. ConfigServiceProperty tySourceLocator:从服务器获取配置,地址为:http://localhost:8888/story2022-05-02 17:28:08.
-
网飞丝带和Hystrix超时
我们在项目中使用Spring cloud。我们有几个微服务,每个服务都有自己的。yml文件。 以下属性仅在zuul服务器中 下面是我在关联服务中得到的错误 以下是我在帐户服务中得到的错误 如果我保持睡眠时间为4500,它会给我响应,但如果是>=4800,它会抛出上面的异常。我想这与功能区超时无关,而是其他一些东西。任何特定原因导致上述异常后的某一点。 测试2 (这是一个很长的描述,但为了使它更清楚
-
飞镖2。X List.cast()不作曲
即将推出的Dart 2。X版本需要强大的键入。在处理JSON数据时,我们现在必须将动态类型转换为适当的Dart类型(不是问题)。一个相关的问题忽略从JSArray到List的强制转换失败 问题是函数似乎无法组合。使用DDC编译并在Chrome浏览器中运行时的原始代码: 现在接收运行时警告(这将很快是一个错误) 所以我添加了
-
飞镖多个构造函数
真的不可能在 dart 中为一个类创建多个构造函数吗? 在我的播放器类中,如果我有这个构造函数 然后我尝试添加这个构造函数: 我得到以下错误: 默认构造函数已定义。 我不是通过创建一个带有一堆非必需参数的构造函数来寻找解决方法。 有没有好办法解决这个问题?
-
 飞镖/颤振日期格式
飞镖/颤振日期格式我试图改变从API返回的日期字符串的格式。下面的日期格式输入字符串在java中工作正常,但在Dart中则不行。
-
Spring靴与飞道不工作
我使用的是Spring-BootV1.1.10.Release,用于基于spring的web应用程序。我的数据库是Postgres&用于我的数据库迁移的Flyway。 postgres sql脚本文件由flyway-maven-plugin通过以下maven命令成功执行,即mvn compile flyway:migrate 但是同一个Postgres sql脚本文件抛出了psqlexceptio
-
概念解读 - 飞行模式
飞行模式定义了系统在任何给定时间的状态。用户可以使用远程遥控器或者QGroundControl地面站来进行飞行模式切换。 飞行模式的简要说明 手动模式 MANUAL 固定翼飞行器/车辆/船舶:飞手的控制输入直接输出到混控器。 多旋翼飞行器: 特技模式 ACRO:飞手的输入被转换成横滚、俯仰、偏航角速度 传送给自驾仪。在这个模式下多旋翼飞行器可以完全翻转。油门直接输出到混控器。 角速度控制 RATT
-
Debugging/Logging - 飞行日志分析
translated_page: https://github.com/PX4/Devguide/blob/master/en/log/flight_log_analysis.md translated_sha: 95b39d747851dd01c1fe5d36b24e59ec865e323e Flight Log Analysis 这里有几个分析PX4飞行日志的软件,描述如下: Log Munc
-
删除一条飞行路径
接口说明 如果已建立了视点之间的关联,而由于某些原因,不想再进行视点之间动画飞行,Wish3DEarth团队新增了删除飞行路径的接口,开发者可以通过该接口,来解除视点之间的动画飞行。 如需调用,请访问 开发者文档 来查看详细的接口使用说明 该接口仅开放给已获取SDK的开发者 API地址 POST /api/flyline/1.0.0/del 是否需要登录 是 请求字段说明 参数 类型 请求类型 是