《华为机试》专题
-
 上海华测导航 软测岗面经
上海华测导航 软测岗面经### 2024/9/23 华测导航一面 1、自我介绍 2、元组和列表的区别 3、python的参数类型和作用 4、还问了一个python问题,说了两个英文啥和啥的区别?没听懂哭了直接说不会 5、聊自动化测试项目,框架是不是自己搭的?介绍一下 6、项目中遇到的挑战 7、项目中涉及的阶段性测试 8、软件测试的基本流程 9、除了网页端ui测试之后,还了解其他哪些测试?(app端测试、接口测试) 10、
-
 Java面经-1年半经验-华子OD
Java面经-1年半经验-华子OD看了牛牛网这么多前辈的面经,我也分享给大家吧 背景: 22双非本,工作一年半 一、12.24机考 (297分) --有做到栗栗姐给的200分原题(最长的指定瑕疵度的元音子串) 虚拟理财游戏绘图机器最长的指定瑕疵度的元音子串 二、12.28 hr面 1.自我介绍 2.为什么选了东莞,不选深圳(个人原因) 3.od看法 4.家庭情况 5.如果给offer什么时候能入职 6.期望薪资,如果低于该薪资会考
-
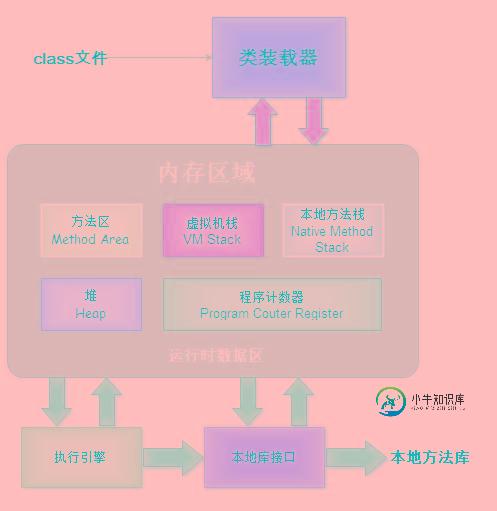 Java JVM虚拟机运行机制
Java JVM虚拟机运行机制本文向大家介绍Java JVM虚拟机运行机制,包括了Java JVM虚拟机运行机制的使用技巧和注意事项,需要的朋友参考一下 一:JVM基础概念 JVM(Java虚拟机)一种用于计算设备的规范,可用不同的方式(软件或硬件)加以实现。编译虚拟机的指令集与编译微处理器的指令集非常类似。Java虚拟机包括一套字节码指令集、一组寄存器、一个栈、一个垃圾回收堆和一个存储方法域。
-
主机名与规范主机名
问题内容: 谁能解释一下主机名和规范主机名之间的区别? 我当前正在使用InetAddress类使用IP地址获取主机名。我遇到了这两个API。所以我只是想知道,我应该选择哪一个? 问题答案: 两者之间有一些区别: 将尝试解析FQDN。因此,您将获得 _foo.mycompany.com, 而可能仅返回 _foo 。 将始终进行反向DNS查找,而如果在构造函数中提供了主机名,则将返回存储的主机名。 如
-
box2d:相机和机身未同步
我试图用Box2D和libgdx制作一个程序,让角色在静态物体(这里是一个圆圈)上跳跃。但是我的相机(跟随动态物体(玩家))一直在下降,即使我的角色按照预期停留在圆圈的顶部。所以我的问题是: 1)为什么我的相机一直在下降,而它应该跟随停留在静态物体顶部的“玩家身体”?2)为什么我的相机在我按Z键时反弹,而不是我的玩家身体? 提前谢谢。您可以尝试在eclipse中运行它,以便更好地理解我的意思,以下
-
为什么Java虚拟机中没有GIL?为什么Python需要这么糟糕?
问题内容: 我希望有人能够提供一些有关Java虚拟机的根本差异的见解,从而使Java虚拟机可以很好地实现线程而无需使用全局解释器锁(GIL),而Python则需要这样做。 问题答案: Python(该语言)不需要GIL(这就是为什么它可以在JVM [Jython]和.NET [IronPython]上完美实现的原因,并且这些实现可以自由地使用多线程)。CPython(流行的实现)一直使用GIL来简
-
Repast Simphony:将全局行为调度为具有随机间隔的泊松过程
我有一个功能模型,我想强迫一个随机代理在不同的时间间隔内改变状态,模型为泊松到达过程。我根据FAQ设置了一个全局行为,在Build()中包含一个如下所示的块(其中a和b在parameters.xml中外部化): 然后我有一个上下文方法,看起来像这样: 这似乎是有效的,除了它从调试文本中显示在所有重复上对b使用相同的值。是否有办法让每个重复使用新的随机绘制?或者有其他(更好的)方法来实现这一点?
-
将nil[]字节变量转换为字符串不会死机。为什么不呢?
https://play.golang.org/p/dzRzzKvUyd
-
为什么没有更多的Java软件本机编译?
问题内容: 我意识到字节码与本机代码(可移植性)的好处。 但是要说您始终知道您的代码将在x86架构上运行,为什么不为x86编译并获得性能收益呢? 请注意,我假设本机代码编译会提高性能。有些人回答说,实际上没有任何收获对我来说是个新闻。 问题答案: 因为性能提升(如果有)是不值得的。 同样, 垃圾回收 对于性能也很重要。很有可能JVM的GC优于嵌入在已编译的可执行文件中的GC,例如使用GCJ。 而
-
为什么malloc没有“用完”计算机上的内存?
问题内容: 因此,我有一个分配256 MB内存的程序,在用户按下ENTER键后,它将释放内存并终止。 我多次运行了该程序并将它们分别作为背景,直到不再有足够的内存可以分配。但是,那永远不会发生。我运行了linux 命令,即使在多次运行该程序之后,可用内存也不会减少多达256 MB。 但是,另一方面,如果我使用而不是则存在巨大差异: 现在,如果我运行该程序并使其后台运行,然后重复执行,则每次运行它时
-
如何使用python / matplotlib为3D图设置“相机位置”?
问题内容: 我正在学习如何使用mplot3d生成漂亮的3d数据图,到目前为止我很高兴。我现在想做的是旋转表面的动画效果。为此,我需要为3D投影设置相机位置。我猜这一定是有可能的,因为在交互使用matplotlib时,可以使用鼠标旋转表面。但是如何从脚本执行此操作?我在mpl_toolkits.mplot3d.proj3d中找到了很多转换,但是我找不到如何使用这些转换的目的,也没有找到任何尝试的示例
-
将图像转换为CVPixelBuffer以进行机器学习Swift
问题内容: 我正在尝试让Apple的示例核心ML模型在2017年WWDC上演示以正常运行。我正在使用GoogLeNet尝试对图像进行分类(请参阅Apple机器学习页面)。该模型将CVPixelBuffer作为输入。我有一个用于本演示的名为imageSample.jpg的图像。我的代码如下: 我总是在输出而不是图像分类中遇到意外的运行时错误。我的转换图像的代码如下: 我从以前的帖子中获得了此代码。我
-
在Python中使随机模块成为线程安全的
问题内容: 我有一个应用程序,要求给定相同的随机种子,结果相同。但是我发现random.randint不是线程安全的。我已经尝试过互斥锁,但这不起作用。这是我的实验代码(很长但很简单): 我想编码打印 true,true ,但是它有机会给出 false,false 。如何制作线程安全的randint? 问题答案: 其他人指出了以线程安全方式使用的正确方法。但是我觉得必须指出,您编写的代码对任何内容
-
如何在Docker Compose中将主机目录挂载为卷
问题内容: 我有一个正在进行dockerizing的开发环境,并且我希望能够实时重新加载所做的更改而不必重建docker映像。我使用docker compose是因为redis是我应用程序的依赖项之一,我喜欢能够链接redis容器 我在我的中定义了两个容器: 我已经到了我应用程序的dockerfile中添加卷的地步,但是如何将主机的目录挂载到卷中,以便对代码的所有实时编辑都可以反映在容器中? 这是
-
极大值中行列式不为零的随机矩阵
我想用极大值生成一个包含随机项的矩阵,这样矩阵的行列式就不会为零,然后进一步在Moodle的堆栈中实现这一点。我对Maxima(或任何与此相关的CA)的工作都是全新的,因此我一直在浏览我在网上找到的各种示例,到目前为止,我成功地做到了这一点: 生成具有0或1的2x2随机矩阵(出于简单性原因)并计算其行列式: 对于下一步,我想定义一个矩阵M2,如下所示: 如果矩阵M1的行列式已经不是零,好吧,我会同