
检测具有模糊边缘和不同背景的卡的边缘

这是我的测试照片
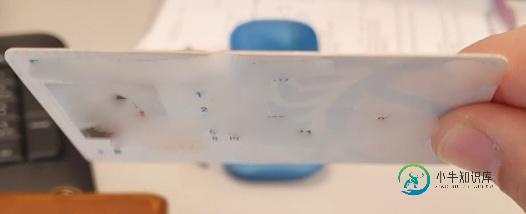
我正在努力寻找卡片的边缘。但是,正如您所看到的,边缘有些模糊。
在这里找到一些建议:模糊边缘检测如何从python中的模糊图像中找到扭曲矩形的精确角点位置?,但没有一个能产生令人满意的边缘。
完整代码:
def auto_canny(image, sigma=0.5):
v = np.median(image)
lower = int(max(0, (1.0 - sigma) * v))
upper = int(min(255, (1.0 + sigma) * v))
return cv2.Canny(image, lower, upper)
def add_contrast(img, contrast_level=8):
lab = cv2.cvtColor(img, cv2.COLOR_BGR2LAB)
l, a, b = cv2.split(lab)
clahe = cv2.createCLAHE(clipLimit=3.0, tileGridSize=(contrast_level, contrast_level))
cl = clahe.apply(l)
limg = cv2.merge((cl, a, b))
final = cv2.cvtColor(limg, cv2.COLOR_LAB2BGR)
return final
# ------------------------------------------ #
# FIND EDGES
# ------------------------------------------ #
img = add_contrast(img=img, contrast_level=8)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
cv2.imshow("gray", gray)
kernel_size = 5
blur_gray = cv2.GaussianBlur(gray, (kernel_size, kernel_size), 0)
edges = auto_canny(image=blur_gray)
# Show images for testing
cv2.imshow('edges', edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
共有2个答案

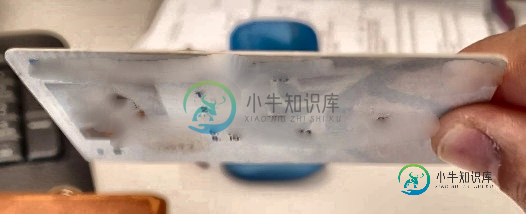
您可以通过使用填充部分后台cv2.floodFill来改进解决方案。
在找到边之前增强对比度是一个不错的主意,但它似乎会创建一些瑕疵,使得查找边更加困难。
下面是一个代码示例:
import numpy as np
import cv2
def auto_canny(image, sigma=0.5):
v = np.median(image)
lower = int(max(0, (1.0 - sigma) * v))
upper = int(min(255, (1.0 + sigma) * v))
return cv2.Canny(image, lower, upper)
img = cv2.imread('card.png')
h, w = img.shape[0], img.shape[1]
# Seed points for floodFill (use few points at each corner for improving robustness)
seedPoints = ((5, 5), (w-5, 5), (5, h-5), (w-5, h-5),
(w//2, 5), (w//2, h-5), (5, h//2), (w-5, h//2),
(w//4, 5), (w//4, h-5), (5, h//4), (w-5, h//4),
(w*3//4, 5), (w*3//4, h-5), (5, h*3//4), (w-5, h*3//4))
# Fill parts of the background with black color
for seed in seedPoints:
cv2.floodFill(img, None, seedPoint=seed, newVal=(0, 0, 0), loDiff=(2, 2, 2), upDiff=(2, 2, 2))
# ------------------------------------------ #
# FIND EDGES
# ------------------------------------------ #
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
cv2.imshow("gray", gray)
kernel_size = 5
blur_gray = cv2.GaussianBlur(gray, (kernel_size, kernel_size), 0)
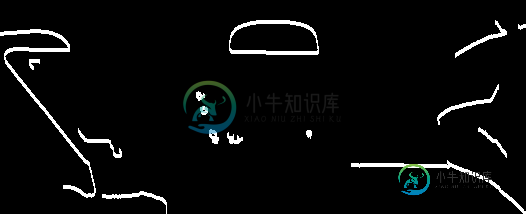
# Second, process edge detection use Canny.
edges = auto_canny(image=blur_gray)
# Show images for testing
cv2.imshow('edges', edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
我知道这不是一个完整的解决方案,但我希望它能有所帮助...

这也不是一个完整的解决方案,但是如果红色部分有问题,您可以首先使用cv2修复这些部分。inpaint()函数。然后,您可以应用其余的方法来查找卡片边缘。
# create an inpainting mask with "red-enough" pixels
mask = cv2.inRange(img_src_rgb, np.array([200,0,0]), np.array([255,50,50]))
# enlarge the mask to cover the borders
kernel = np.ones((3,3),np.uint8)
mask = cv2.dilate(mask,kernel,iterations = 1)
# inpaint the red parts using Navier-Stokes based approach
img_dst = cv2.inpaint(img_src, mask,50,cv2.INPAINT_NS)
cv2.imshow("no_red", img_dst)
结果图像如下。
编辑:现在我们知道你在问什么,下面是一个完整的解决方案。
修复后,您可以应用霍夫变换来找到图像中的强直线。
gray = cv2.cvtColor(img_dst, cv2.COLOR_RGB2GRAY)
edges = auto_canny(gray) # your auto_canny function, WITHOUT blur
lines = cv2.HoughLines(edges, 1, np.pi/90, 50)
for line in lines:
rho,theta = line[0]
a = np.cos(theta)
b = np.sin(theta)
x0 = a*rho
y0 = b*rho
x1 = int(x0 + 10000*(-b))
y1 = int(y0 + 10000*(a))
x2 = int(x0 - 10000*(-b))
y2 = int(y0 - 10000*(a))
cv2.line(img_dst,(x1,y1),(x2,y2),(0,255,0),1)
cv2.imwrite('linesDetected.jpg', img_dst)
同样,结果行如下。
-
我几乎没有图像处理和识别的背景知识。我试图检测灰度图像(如肖像)上的主边缘/灰度变换。问题是在某些部分,边缘模糊(因为焦点)。我使用的是具有多个阈值的Canny边缘检测器,但我永远无法检测到这些边缘(下巴、衣服、耳朵、脸部侧面等) 边缘检测是正确的工具吗?谢谢
-
Canny边缘检测用于检测图像中的边缘。 它接受灰度图像作为输入,并使用多级算法。可以使用类的方法在图像上执行此操作,以下是此方法的语法。 该方法接受以下参数 - image - 表示此操作的源(输入图像)的对象。 edges - 表示此操作的目标(边缘)的对象。 threshold1 - 类型为的变量表示滞后过程的第一个阈值。 threshold2 - 类型为的变量表示滞后过程的第二个阈值。 示
-
目标 在这一章中,我们将学习 Canny 边缘检测的概念 OpenCV 的 Canny 边缘检测函数:cv2.Canny() 理论基础 Canny边缘检测是一种流行的边缘检测算法。它是由 John F. Canny 于 1986 年开发的。它是一个多阶段算法,我们将学习每个阶段做了什么。 降噪 由于边缘检测容易受到图像中的噪声影响,因此首先要用5x5高斯滤波器去除图像中的噪声。我们在前面的章节已经
-
目标 在本章中,我们将学习 Canny边缘检测的概念 OpenCV函数: cv.Canny() 理论 Canny Edge Detection是一种流行的边缘检测算法。它由John F. Canny发明 这是一个多阶段算法,我们将经历每个阶段。 降噪 由于边缘检测容易受到图像中噪声的影响,因此第一步是使用5x5高斯滤波器消除图像中的噪声。我们已经在前面的章节中看到了这一点。 查找图像的强度梯度 然
-
问题内容: 我想在一个子图中绘制阻尼随机游走的时间序列,然后在第二个子图中放大它。我从matplotlib知道,效果很好。到目前为止,我的代码是: 这将创建如下图: 这几乎是我想要的,除了连接2个子图的线从第一个子图中的框的上边缘开始。是否有可能从第二个子图中的较低的两个边缘开始,而仍然在第二个子图中的较高的两个边缘处结束呢?我要怎么做才能做到这一点? 问题答案: 在有两个参数,并设置两个连接器的
-
Haskell库中是否存在这种数据结构?我做了一些搜索,但找不到任何有用的东西。我想使用现有的类型,而不是定义我自己的类型——它似乎应该存在。 这个想法是它与Data. Tree非常相似,但是边可以保存信息和节点。 如果你有一个通过树的路径(类型为[e]),你可以在O(log(n))中找到rootLabel(类型为n)。据我所知,你不能用Data做这件事。树,因为您必须扫描每个节点的子节点,以查找